Procedimiento y dispositivo para el examen sin contacto de un objeto, en especial en cuanto a su forma superficial.
Procedimiento para el examen de un objeto, en especial en cuanto a su forma superficial,
en el que
- una carcasa (30) del dispositivo, que contiene varias fuentes luminosas y presenta una abertura de iluminación, y el objeto (20) adoptan mutuamente una posición,
- se irradia con luz un segmento superficial (22) del objeto (20) a través de la abertura de iluminación de la 5 carcasa (30), consecutivamente y bajo diferentes ángulos de caída,
- al menos un sensor de imágenes (40) detecta la luz irradiada por el segmento superficial (22) por cada ángulo de caída,
- por cada ángulo de caída y cada sensor de imágenes (40) cada segmento superficial (22) genera al menos una cantidad de datos de imagen,
- a partir de al menos una primera cantidad de datos de imagen, que se ha generado desde al menos una fuente luminosa de primer tipo orientada bajo un primer ángulo de caída entre oblicuo y plano, se deducen particularidades de forma y, a partir de al menos una segunda cantidad de datos de imagen, que se ha generado desde al menos una fuente luminosa de segundo tipo orientada bajo un segundo ángulo de caída entre oblicuo y plano diferente del primer ángulo de caída, particularidades independientes de la forma,
- para adoptar la posición mutua el objeto (20) está sujetado fijamente y la carcasa (30) se instala con movimiento libre mediante un operario sobre la superficie (21) del objeto (20), casi de forma impermeable a la luz, o bien se desplaza haciendo contacto con la superficie (21),
caracterizado porque
antes de la deducción de particularidades de forma a partir de la primera cantidad de datos de imagen, se reduce la primera cantidad de datos de imagen, con la segunda cantidad de datos de imagen, en cuanto a influencias falseadoras de particularidades independientes de la forma.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2002/001667.
Solicitante: WEINHOLD, WOLFGANG P.
Nacionalidad solicitante: Alemania.
Dirección: HAUGERRING 6 97070 WÜRZBURG ALEMANIA.
Inventor/es: Weinhold,Wolfgang P.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
- G01B11/30 G01B 11/00 […] › para la medida de la rugosidad o la irregularidad de superficies.
- G01N21/25 G01 […] › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › Color; Propiedades espectrales, es decir, comparación del efecto del material sobre la luz para varias longitudes de ondas o varias bandas de longitudes de ondas diferentes.
- G01N21/88 G01N 21/00 […] › Investigación de la presencia de grietas, de defectos o de manchas.
- G01N21/958 G01N 21/00 […] › Inspección de materiales transparentes.
PDF original: ES-2384958_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo para el examen sin contacto de un objeto, en especial en cuanto a su forma superficial.
La invención se refiere a un procedimiento para el examen de un objeto, en especial en cuanto a su forma superficial según el preámbulo de la reivindicación 1, así como a un dispositivo para llevar a cabo el procedimiento según el preámbulo de la reivindicación 5.
Ya se conocen procedimientos y dispositivos que examinan la forma de la superficie de objetos, sin contacto y con la ayuda de medios auxiliares ópticos. De este modo pueden localizarse y cuantificarse de forma sencilla, mediante la utilización de luz rasante u oblicua que ilumina la superficie oblicuamente o con un ángulo plano, por ejemplo partículas de suciedad, irregularidades, puntos rugosos, huellas de mecanización, etc. situados sobre superficies. Esto se basa en el hecho de que, según la intensidad de estas variaciones respecto a una forma nominal se producen campos claros/oscuros marcados con más o menos intensidad, por ejemplo a causa de flancos descendentes iluminados y ensombrecidos que, a su vez, permiten sacar conclusiones sobre la forma superficial tridimensional. Este modo de proceder se conoce desde hace tiempo bajo la designación procedimiento de luz rasante u oblicua, por ejemplo del documento DE 197 16 264 A1, y se usa de forma simplificada a la inversa también en la producción de mapas terrestres topográficos, para conferir al mapa plano mediante una incidencia de luz imaginaria, visualmente, una impresión plástica de la forma del terreno; el efecto deseado recibe allí el nombre de difuminado o plástica de sombras. En general existe una relación funcional entre el ángulo de caída de la luz, la orientación espacial y la posición de una superficie parcial, en especial de su inclinación y altura, y el ángulo de reflexión de la luz reflejada. La luz reflejada se detecta mediante un sensor opto-electrónico situado fundamentalmente en perpendicular a la superficie, por ejemplo un sensor de líneas o matriz, como información de valores de grises y a continuación se alimenta a un tratamiento digital de imágenes. Este procedimiento es especialmente adecuado en el caso de variaciones de forma puntuales, lineales o recurrentes con frecuencia, como por ejemplo en el caso de suciedades y arañazos.
Asimismo se conoce el llamado procedimiento de luz en tiras, en el que sobre la superficie de un objeto con ayuda de una fuente luminosa se proyecta una plantilla definida geométricamente, por ejemplo tiras claras y oscuras. Según la intensidad de elevaciones o depresiones de la superficie se deforma la plantilla proyectada y, de este modo, por ejemplo en el caso de una superficie parcial más vuelta hacia la fuente luminosa se reducen la anchura y la separación de las tiras, mientras que en el caso una superficie parcial más alejada de la fuente luminosa, por ejemplo una depresión, éstas aumentan por el contrario. Después de que la luz reflejada se haya reflejado también con un sensor opto-electrónico y sus valores de medición se hayan alimentado a una valoración de tratamiento de imágenes, a través de algoritmos adecuados puede deducirse de la deformación de la plantilla un modelo superficial tridimensional. Este procedimiento, conocido entre otros del documento DE 197 30 885 A1, también llamado procedimiento luminoso codificado o procedimiento de proyección, es especialmente apropiado cuando no se dispone de una estructura superficial rica en detalles con un contrastre claro/oscuro correspondiente, por ejemplo en el caso de superficie lisas pero dotadas de forma defectuosa de abombamientos de gran superficie.
Tanto en el procedimiento de luz rasante como en el de luz en tiras, la luz emitida por una fuente luminosa se refleja desde la superficie en función de la forma superficial. La distribución de claridad o valores de gris detectada por un sensor de imágenes está correlacionada más o menos estrictamente con esta forma superficial.
Estos procedimientos y dispositivos conocidos presentan sin embargo, entre otros, el inconveniente de que sólo pueden entregar fundamentalmente particularidades de forma tridimensionales, es decir datos geométricos de la superficie del objeto. Además de esto las relaciones funcionales entre distribución de claridad y forma superficial sólo son válidas, de forma estricta, para una superficie con características de material constantes. Si la superficie se compone de diferentes materiales adyacentes, que presentan diferentes características independientes de la forma, respectivamente fotométricas, como por ejemplo parámetros de reflexión, transmisión y absorción, éstas falsean el resultado de la medición. Esto significa que la distribución de claridad deseada en los procedimientos antes descritos, en el caso de diferencias de forma se solapa con valores de claridad de partes de superficie multicolor, decoradas o veteadas, que no difieren de una forma nominal, de tal modo que al valor de claridad resultante ya no puede asociarse claramente una forma determinada, por ejemplo flancos descendentes con una inclinación x, o un material determinado, por ejemplo suciedad con el valor de grises e independiente de la forma, respectivamente específico del material.
Del documento DE 198 39 882 se conoce una instalación de iluminación para decorar superficies barnizadas de carrocerías, en la que se quiere conseguir con fuentes de iluminación dispuestas de forma diferente, por un lado particularidades de forma y por otro lado particularidades independientes de la forma, como parámetros específicos del material, como por ejemplo fallos de color. Se distingue entre una iluminación básica, cuya luz incide de forma preferida con un ángulo de caída de 45º en la superficie de la carrocería, que sirve de iluminación de trabajo para trabajos de reparación y al mismo tiempo está prevista para reconocer fallos de color o pulido, y una iluminación estructural con fuentes luminosas ejecutadas específicamente, lineales y que irradian también con un ángulo de unos 45º, con cuya ayuda se pretende reconocer deformaciones en la superficie, por ejemplo muescas. La instalación de iluminación está configurada como gran dispositivo estacionario, a través del cual son guiados los vehículos de motor a examinar y se encuentran personas para trabajos de reparación así como para la decoración manual de la superficie de la carrocería. Aquí existe el inconveniente de que una persona para reconocer los diferentes tipos de fallo tiene que variar el ángulo de observación y con ello, forzosamente, ya no puede observar uno y el mismo segmento superficial. Si la persona desea evaluar el mismo segmento superficial con relación a ambos tipos de fallo, ésta tiene además que cambiar la posición. Aparte de esto, de este modo sólo es posible una evaluación o bien de un tipo de error no topográfico, como por ejemplo suciedades o fallos de color, o bien de un tipo de fallo topográfico, como por ejemplo abolladuras. No tiene lugar una valoración combinada. De modo comparable, esto es aplicable también a una cámara usada para sustituir la percepción visual de una persona. El procedimiento parece ser en resumen complicado y de ejecución costosa, y sólo puede aplicarse a superficies brillantes. Las dimensiones de la instalación de iluminación sólo permiten un uso estacionario.
Aparte de esto, en el documento DE 35 40 288 A1 se describen una disposición y un procedimiento para llevar a cabo controles en puntos de soldadura, en el que se dirige luz con diferentes ángulos de caída hacia puntos de soldadura de una pletina y la luz reflejada por el punto de soldadura se detecta mediante uno o varios sensores de imagen negra/blanca y, de este modo, se generan varias imágenes con contenido informativo diferente en función del ángulo de caída. En el caso de una síntesis a continuación mediante técnica de computación de las imágenes pueden sacarse conclusiones sobre la adecuación de la forma del punto de soldadura. Debido a que siempre se examina el mismo material, se realiza una combinación entre particularidades de forma y particularidades independientes de la forma, sólo de tal modo que – después de que las particularidades de forma ya se hayan generado de forma enrasada – se toma una decisión sobre si – en el caso de que no haya podido determinarse una forma marcada del punto de soldadura – se presenta un punto con solamente muy poca soldadura, un circuito impreso sin soldadura o el material de placa de circuito impreso. Aquí no está previsto un procesamientos de datos combinado para reducir influencias de fallos independientes de la forma. La propia disposición se compone... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el examen de un objeto, en especial en cuanto a su forma superficial, en el que
- una carcasa (30) del dispositivo, que contiene varias fuentes luminosas y presenta una abertura de iluminación, y el objeto (20) adoptan mutuamente una posición,
- se irradia con luz un segmento superficial (22) del objeto (20) a través de la abertura de iluminación de la carcasa (30) , consecutivamente y bajo diferentes ángulos de caída,
- al menos un sensor de imágenes (40) detecta la luz irradiada por el segmento superficial (22) por cada ángulo de caída,
- por cada ángulo de caída y cada sensor de imágenes (40) cada segmento superficial (22) genera al menos una cantidad de datos de imagen,
- a partir de al menos una primera cantidad de datos de imagen, que se ha generado desde al menos una fuente luminosa de primer tipo orientada bajo un primer ángulo de caída entre oblicuo y plano, se deducen particularidades de forma y, a partir de al menos una segunda cantidad de datos de imagen, que se ha generado desde al menos una fuente luminosa de segundo tipo orientada bajo un segundo ángulo de caída entre oblicuo y plano diferente del primer ángulo de caída, particularidades independientes de la forma,
- para adoptar la posición mutua el objeto (20) está sujetado fijamente y la carcasa (30) se instala con movimiento libre mediante un operario sobre la superficie (21) del objeto (20) , casi de forma impermeable a la luz, o bien se desplaza haciendo contacto con la superficie (21) ,
caracterizado porque antes de la deducción de particularidades de forma a partir de la primera cantidad de datos de imagen, se reduce la primera cantidad de datos de imagen, con la segunda cantidad de datos de imagen, en cuanto a influencias falseadoras de particularidades independientes de la forma.
2. Procedimiento según la reivindicación 1, caracterizado porque la primera y la segunda cantidad de datos de imagen se generan mediante el mismo sensor de imágenes (40) .
3. Procedimiento según la reivindicación 1, caracterizado porque para generar una primera cantidad de datos de imagen, a partir de la cual pueden deducirse particularidades de forma, se proyecta una plantilla definida geométricamente sobre el segmento superficial (22) .
4. Procedimiento según la reivindicación 1, caracterizado porque para generar una segunda cantidad de datos de imagen, a partir de la cual pueden deducirse particularidades independientes de la forma, se transmite luz a través del objeto (20) en la carcasa (30) .
5. Dispositivo para el examen de un objeto, en especial en cuanto a su forma superficial, con
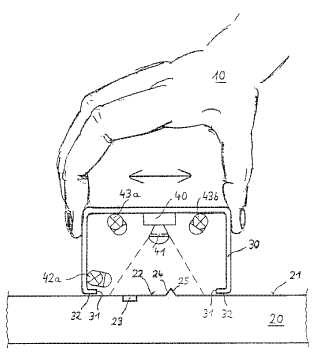
- una carcasa (30) que presenta una abertura de iluminación dirigida hacia la superficie (21) del objeto (20) , en donde la carcasa (30) está ejecutada a modo de un aparato manual portátil y puede moverse libremente con relación al objeto fijo (20) y puede depositarse o desplazarse, de forma casi impermeable a la luz, directamente sobre o por encima de la superficie (21) del objeto (20) ,
- al menos una fuente luminosa de un primer tipo (42 a, 42 b) , la cual con su eje óptico está orientada con un ángulo de caída entre oblicuo y plano con relación a la superficie (21) ,
- al menos una fuente luminosa de un segundo tipo (43 a, 43 b) , la cual con su eje óptico está orientada con un ángulo de caída entre oblicuo y plano diferente al primer ángulo de caída con relación a la superficie (21) ,
en donde las fuentes luminosas de primer tipo (42 a, 42 b) y al menos una fuente luminosa de segundo tipo (43 a, 43 b) están dispuestas dentro de la carcasa (30) y las fuentes luminosas pueden controlarse al menos según su tipo,
- al menos un sensor de imágenes (40) , que detecta la luz irradiada desde la superficie (21) ,
- una unidad de control y/o valoración (50) dispuesta en la carcasa, que está unida a las fuentes luminosas de primer tipo (42 a, 42 b) y al menos a una fuente luminosa de segundo tipo (43 a, 43 b) así como al sensor de imágenes (40) , en donde la unidad de control y/o valoración (50) está diseñada para generar, a partir de la luz procedente de la fuente luminosa de primer tipo (42 a, 42b) , reflejada por la superficie (21) y detectada por el sensor (40) , una primera cantidad de datos de imagen y, a partir de la luz procedente de la fuente luminosa de segundo tipo (42 a, 42b) , reflejada por la superficie (21) y detectada por el sensor (40) , una segunda cantidad de datos de imagen,
caracterizado porque la unidad de control y/o valoración (50) está diseñada para, antes de la deducción de particularidades de forma a partir de la primera cantidad de datos de imagen, reducir la primera cantidad de datos de imagen, con la segunda cantidad de datos de imagen, en cuanto a influencias falseadoras de particularidades independientes de la forma.
6. Dispositivo según la reivindicación 5, caracterizado porque el sensor de imágenes (40) es un sensor de imágenes en color dispuesto fijamente en la carcasa (30) y la distancia entre la al menos una fuente luminosa de segundo tipo (43 a, 43 b) , dispuesta en la carcasa, y la superficie (21) , es mayor o igual que la distancia entre el sensor de luz (40) y la superficie (21) .
7. Dispositivo según la reivindicación 5, caracterizado porque el sensor de imágenes (40) está dispuesto de tal modo que con su eje óptico, directamente o a través de una unidad de inversión, está orientado con un ángulo respecto a la superficie (21) de entre 60º y 90º.
8. Dispositivo según la reivindicación 5, caracterizado porque el ángulo de caída de las fuentes luminosas de primer tipo es de entre 5º y 20º, de forma preferida de 7º, y el ángulo de caída de las fuentes luminosas de segundo tipo de entre 45º y 90º, de forma preferida de 60º.
9. Dispositivo según la reivindicación 5, caracterizado porque a las fuentes luminosas de primer y segundo tipo está preconectada en cada caso una óptica, que prefija un ángulo de radiación.
10. Dispositivo según la reivindicación 9, caracterizado porque los ángulos de radiación de las fuentes luminosas de primer tipo son pequeños o casi cero
11. Dispositivo según la reivindicación 5, caracterizado porque las fuentes luminosas de primer y/o segundo tipo irradian sobre la superficie (21) en diferentes direcciones horizontales.
12. Dispositivo según la reivindicación 5, caracterizado porque en lugar de las fuentes luminosas están previstas instalaciones de inversión con fuentes luminosas asociadas a las mismas.
13. Dispositivo según la reivindicación 5, caracterizado porque las fuentes luminosas de primer tipo (42 a, 42 b) y de segundo tipo (43 a, 43 b, 44) pueden conectarse y desconectarse o bien atenuarse aisladamente, en combinación o según su tipo,
14. Dispositivo según la reivindicación 5, caracterizado porque a una fuente luminosa de primer tipo está asociado un diafragma con una plantilla definida geométricamente.
15. Dispositivo según la reivindicación 5, caracterizado porque una fuente luminosa de segundo tipo (45) está dispuesta por fuera de la carcasa, en el lado del objeto (20) opuesto al sensor de imágenes.
16. Dispositivo según la reivindicación 5, caracterizado porque en el interior de la carcasa (30) está dispuesta una alimentación de corriente (51) .
17. Dispositivo según la reivindicación 5, caracterizado porque la alimentación de corriente se realiza a través de la unidad de ordenador (56) .
18. Dispositivo según la reivindicación 5, caracterizado porque están previstas una pantalla y/o una unidad de mando (54) .
19. Dispositivo según la reivindicación 5, caracterizado porque está previsto un interfaz (55) , a través del cual pueden intercambiarse señales eléctricas entre la unidad de control y/o valoración (50) y una unidad de ordenador externa (56) .
Patentes similares o relacionadas:
Sistema para la detección óptica de objetos, del 6 de Mayo de 2020, de Phenospex B.V: Sistema para la detección óptica de objetos, por medio de triangulación láser con una fuente para la generación de luz de una primera longitud de onda, donde […]
Sensor de fibra óptica de iluminación, multi paramétrico y con múltiples puntos sensores, del 8 de Abril de 2020, de Egalon, Claudio Oliveira: Un sistema de detección que comprende: una fibra óptica sensible , que tiene un primer y un segundo terminal, que tiene un núcleo , […]
DISPOSITIVO SINCRÓNICO EN TIEMPO REAL PARA MEDICIÓN DE MATERIAL GEOLÓGICO, del 5 de Marzo de 2020, de HIDROTECNOS SPA: La presente invención se refiere a un dispositivo de medición electrónico informático fiable y de robusto funcionamiento para la industria minera, que permite […]
Calibración y/o detección de errores en un dispositivo de medición óptica para muestras biológicas, del 15 de Enero de 2020, de F. HOFFMANN-LA ROCHE AG: Un procedimiento para la calibración y/o detección de errores en un dispositivo de medición óptica para muestras biológicas que tiene al menos un primer (3a) y un segundo canal […]
Procedimiento de calibración para fotometría y sistema de análisis asociado, del 20 de Noviembre de 2019, de F. HOFFMANN-LA ROCHE AG: Un procedimiento para determinar una propiedad física de una muestra biológica (204, 204'), en el que el procedimiento comprende las etapas de: […]
Espectrofotómetro portátil y método de caracterización de tubos de colectores solares, del 16 de Octubre de 2019, de ABENGOA SOLAR NEW TECHNOLOGIES, S.A: Espectrofotómetro portátil y método de caracterización de tubos de colectores solares para la caracterización simultánea y en campo de coeficientes de reflexión […]
Método y kit para medición de superalta sensibilidad de proteína y ácido nucleico, y nuevo sustrato enzimático, del 9 de Octubre de 2019, de Ito, Etsuro: Un método para someter a ensayo la actividad enzimática usando un complejo anticuerpo-enzima, en el que se usa peroxidasa como una enzima del complejo anticuerpo-enzima […]
Procedimiento de vigilancia de la degradación de un espejo, del 18 de Septiembre de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento de vigilancia de un espejo que comprende una primera pila que comprende una primera capa , una segunda capa reflectante que […]