Determinación del ángulo de rotación de un motor eléctrico.
Procedimiento para determinar un ángulo de rotación (Φb) de un motor eléctrico,
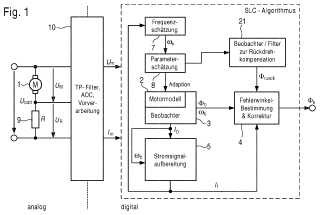
en donde la determinación de un ángulo de rotación inversa (Φrueck) del motor eléctrico (1) se realiza después de su desconexión, con base en una señal de corriente del motor (Im) y una señal de tensión del motor (Um) con los pasos:
- detección de un segundo paso por cero de la señal de corriente del motor (Im) después de la desconexión del motor eléctrico (1), y
- determinación del ángulo de rotación inversa (Φrueck) mediante una valoración basada en modelo de la señal de corriente del motor (Im) y de la señal de tensión del motor (Um), en donde se define un inicio de la rotación inversa después del segundo paso por cero de la señal de corriente del motor (Im) después de la desconexión del motor eléctrico (1).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07109083.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: KRUEGER, HARTMUT, BROSCHE, THOMAS, HEIMBURGER,STEFAN, BITZER,MATTHIAS, Selinger,Joachim.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02P23/12 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 23/00 Disposiciones o métodos para el control de motores de corriente alterna que se caracterizan por un método de control que no sea control por vector. › Control por observador, p. ej. utilizando observadores de Luenberger o filtros de Kalman.
- H02P7/28 H02P […] › H02P 7/00 Disposiciones para la regulación o el control de la velocidad o el par de motores eléctricos de corriente continua. › que utilizan dispositivos semiconductores.
PDF original: ES-2379105_T3.pdf
Fragmento de la descripción:
Determinación del ángulo de rotación de un motor eléctrico Estado de la técnica La presente invención se refiere a un procedimiento y a un dispositivo para determinar el ángulo de rotación de un motor eléctrico.
Manifiesto de la invención Para determinar la posición de motores de corriente continua conmutados mecánicamente se usan normalmente sensores Hall. Otros procedimientos se basan en un conteo del rizado que se produce a causa del proceso de conmutación mecánico en la señal de corriente del motor. Estos procedimientos de conteo del rizado se describen por ejemplo en los documentos DE 100 28 033, DE 100 28 035 a DE 100 28 041 y en el documento US 20030111996. Aquí se separan de la mejor manera posible los rizados causados por conmutación mediante filtrado (paso alto, paso bajo, paso banda) , antes del verdadero conteo, de la señal de corriente.
En el documento DE 197 29 238 C1 se propone un procedimiento que, con ayuda de un modelo de estado de motor, de un detector de rizado y de una unidad de valoración post-conectada, establece el número de revoluciones del motor y de aquí la posición del motor o del actuador. El número de revoluciones se determina aquí de la separación temporal de los procesos de conmutación reconocidos y se compara con el número de revoluciones estimado con base en el modelo de estado de motor. La unidad de valoración establece después el valor del número de revoluciones en cada caso probable y, a partir del valor del número de revoluciones mediante integración respecto al tiempo de medición, el ángulo de rotación.
Del documento DE 199 25 327 A1 se conoce un procedimiento para la vigilancia y el control electrónicos de un proceso para graduar piezas móviles, en especial ventanas y techos corredizos de un vehículo de motor, paragarantizar una protección contra aprisionamiento. Éste presenta al menos los siguientes pasos: alimentación de magnitudes inicial y salida características del proceso hasta una instalación de reconocimiento, localización y optimización de magnitudes de proceso normales de un modelo archivado en la instalación de reconocimiento y que describe el proceso, valoración de los parámetros normales mediante la comparación con magnitudes de proceso archivadas en la instalación de reconocimiento, establecimiento de una magnitud de corrección para el proceso en función de la comparación, y participación en el proceso mediante la alimentación de la magnitud de corrección establecida al proceso.
El documento WO2006/069635 da a conocer un procedimiento para establecer la posición de una unidad de ajuste accionada por un motor eléctrico, en el que se determina un número de revoluciones de motor a partir de un modelo de motor, el número de revoluciones se integra respecto a un espacio de tiempo y se determina la posición de la unidad de ajuste mediante la multiplicación del resultado de la integración por un factor de proporcionalidad. En el momento de desconexión el modelo de motor tiene en cuenta una marcha en inercia del motor eléctrico.
El documento EP 1 659 683 A1 da conocer un procedimiento para establecer una parte alterna de una corriente de un motor de corriente continua, provocada por un proceso de conmutación, en donde el procedimiento comprende una medición de la corriente, una estimación de un parte de corriente continua de la corriente y un establecimiento de una diferencia entre la parte de corriente continua estimada y la corriente medida.
Asimismo se conocen de la técnica de regulación y de la teoría de sistemas procedimientos de estimación de estado apoyados por modelos, con los que pueden estimarse los estados del modelo dinámico de un tramo de regulación (por ejemplo motor DC) . De este modo el documento WO 2006/069635 A3 se refiere a un procedimiento para establecer la posición de una unidad de ajuste accionada por un motor eléctrico, en el que se determina un número de revoluciones del motor a partir de un modelo de motor, el número de revoluciones se integra respecto a un espacio de tiempo y la posición de la unidad de ajuste se determina mediante la multiplicación del resultado de la integración por un factor de proporcionalidad. En el momento de desconexión el modelo de motor tiene en cuenta una marcha en inercia del motor eléctrico. Los procedimientos de este tipo reciben el nombre de observadores (observadores de estado o de Luenberger) o filtros (filtro Kalman) .
Por ello la tarea que se ha impuesto la presente invención consiste en determinar con más precisión la posición del ángulo de rotación de un motor eléctrico con base en valores de medición para la señal de corriente del motor, es decir de una corriente de inducido, y/o la señal de tensión del motor, es decir de una tensión entre bornes, o bien corregir y/o inicializar una determinación, realizada con base en la señal de corriente del motor y/o la señal de tensión del motor, de la posición del ángulo de rotación del motor eléctrico.
El procedimiento conforme a la invención para determinar un ángulo de rotación de un motor eléctrico se realiza mediante la determinación de un ángulo de rotación inversa del motor eléctrico después de su desconexión, con base en una señal de corriente del motor y una señal de tensión del motor con los pasos:
- detección de un segundo paso por cero de la señal de corriente del motor después de la desconexión del motor eléctrico, y
- determinación del ángulo de rotación inversa mediante una valoración basada en modelo de la señal de corriente del motor y de la señal de tensión del motor, en donde se define un inicio de la rotación inversa después del segundo paso por cero de la señal de corriente del motor después de la desconexión del motor eléctrico.
El dispositivo conforme a la invención para determinar un ángulo de rotación de un motor eléctrico presenta, de forma correspondiente,
- una lógica de medición para detectar un segundo paso por cero de la señal de corriente del motor y de la señal de tensión del motor después de la desconexión del motor eléctrico, y
- un observador para determinar el ángulo de rotación inversa mediante una valoración basada en modelo de la señal de corriente del motor y de la señal de tensión del motor, en donde se define un inicio del rotación inversa después del segundo paso por cero de la señal de corriente del motor, después de la desconexión del motor eléctrico.
En procedimientos conocidos para determinar el ángulo de rotación se lleva a cabo una determinación angular mediante la valoración de los procesos de conmutación en la señal de corriente. Normalmente pueden extraerse estos procesos de conmutación de la señal de corriente sólo para un funcionamiento del motor con mayores números de revoluciones y pueden comprobarse, en el caso de números de revoluciones muy bajos, de forma muy defectuosa o incluso nula en la señal de la corriente de inducido.
El comportamiento de rotación inversa del motor de corriente continua está caracterizado por movimientos rotatorios lentos y con fluencia. La problemática descrita con relación a la valoración de los procesos de conmutación no se produce en el procedimiento conforme a la invención y en el dispositivo conforme a la invención, ya que estos se basan en un procedimiento de estimación basado en modelo y por ello durante el estado de motor rotación inversa no dependen de la detección de los procesos de conmutación que se producen en la señal de corriente. Aparte de esto, la rotación inversa del motor está caracterizada por dos procesos de paso por cero y cambios de signo de la señal de corriente después de la desconexión, es decir, un rotación inversa del motor sólo tiene lugar si se produce un segundo paso por cero en la señal de corriente.
El procedimiento conforme a la invención y el dispositivo conforme a la invención detectan este paso por cero de la señal de corriente y comienzan, después del reconocimiento, con la estimación del ángulo de rotación inversa. El algoritmo conforme a la invención permite una determinación altamente precisa del ángulo de rotación inversa mediante una valoración basada en modelo de la señal de corriente y de tensión del motor. Por medio de esto se mejoran claramente la precisión y la robustez de una estimación de posición sin sensor (procedimiento SLC) . Para el establecimiento del ángulo de rotación inversa no se requiere ninguna valoración del rizado de conmutación. Mediante la determinación del ángulo de rotación inversa pueden calcularse efectos de rotación inversa, que se... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar un ángulo de rotación (<b) de un motor eléctrico, en donde la determinación de un ángulo de rotación inversa (<rueck) del motor eléctrico (1) se realiza después de su desconexión, con base en una señal de corriente del motor (Im) y una señal de tensión del motor (Um) con los pasos:
- detección de un segundo paso por cero de la señal de corriente del motor (Im) después de la desconexión del motor eléctrico (1) , y
- determinación del ángulo de rotación inversa (<rueck) mediante una valoración basada en modelo de la señal de corriente del motor (Im) y de la señal de tensión del motor (Um) , en donde se define un inicio de la rotación inversa después del segundo paso por cero de la señal de corriente del motor (Im) después de la desconexión del motor eléctrico (1) .
2. Procedimiento según la reivindicación 1, caracterizado porque el ángulo de rotación inversa (<rueck) se establece mediante un modelo de motor (2a) y/o un modelo de magnitudes perturbadoras (2b) , a partir de la señal de corriente del motor (Im) y de la señal de tensión del motor (Um) .
3. Procedimiento según la reivindicación 2, caracterizado porque el modelo de motor (2a) y/o el modelo de magnitudes perturbadoras (2b) están optimizados a través de una función de observador (3) .
4. Procedimiento según la reivindicación 2 ó 3, caracterizado porque en el modelo de motor (2a) y/o en el modelo de magnitudes perturbadoras (2b) se incluyen un engranaje, accionado por el motor eléctrico (1) , y aplicaciones adyacentes al mismo.
5. Procedimiento según una de las reivindicaciones 2 a 4, caracterizado porque se incluye, para determinar el ángulo de rotación inversa (<rueck) , un modelo de medición (21c, 2c) para un dispositivo de medición para la señal de corriente del motor (Im) y la señal de tensión del motor (Um) .
6. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque la determinación del ángulo de rotación inversa (<rueck) se inicia después de que se haya desconectado el motor eléctrico (1) .
7. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque se utiliza para corregir y/o inicializar un ángulo de rotación de motor (<e) del motor eléctrico (1) , determinado mediante la valoración de señales de los procesos de conmutación en la señal de corriente del motor (Im) .
8. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque se usa en un aparato de control de asiento para asientos de automóvil y/o en un aparato de control para techos corredizos, elevalunas o ajustadores de flaps.
9. Dispositivo para determinar un ángulo de rotación (<e) de un motor eléctrico (1) , que presenta
- una lógica de medición (10) para detectar un segundo paso por cero de la señal de corriente del motor (Im) y de la señal de tensión del motor (Um) después de la desconexión del motor eléctrico (1) , y
- un observador (21) para determinar el ángulo de rotación inversa (<rueck) mediante una valoración basada en modelo de la señal de corriente del motor (Im) y de la señal de tensión del motor (Um) , en donde se define un inicio de la rotación inversa después del segundo paso por cero de la señal de corriente del motor (Im) , después de la desconexión del motor eléctrico (1) .
10. Dispositivo según la reivindicación 9, caracterizado por un modelo de motor (2a) y/o un modelo de magnitudes perturbadoras (2b) dentro de una parte de simulación (21a) del observador (21) .
11. Dispositivo según la reivindicación 10, caracterizado por un modelo de medición (21c) dentro del observador (21) .
12. Dispositivo según una de las reivindicaciones 9 a 11, caracterizado por una unidad de detección (10) para determinar una desconexión del motor eléctrico (1) y para el inicio subsiguiente de la determinación del ángulo de rotación inversa (<rueck) .
13. Dispositivo según una de las reivindicaciones 9 a 12, caracterizado porque está integrado en un aparato de control de asiento para asientos de automóvil y/o en un aparato de control para techos corredizos, elevalunas o ajustadores de flaps.
Patentes similares o relacionadas:
Vehículo ferroviario con operación por batería, del 21 de Febrero de 2018, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para operar un vehículo ferroviario apropiado para operar por batería, que comprende un circuito intermedio y una batería, donde […]
 Dispositivo de ajuste de pala de rotor para una instalación de energía eólica, del 27 de Agosto de 2014, de Repower Systems AG.: Instalación de energía eólica que comprende un rotor con palas de rotor ajustables para accionar un generador , con un dispositivo de ajuste para […]
Dispositivo de ajuste de pala de rotor para una instalación de energía eólica, del 27 de Agosto de 2014, de Repower Systems AG.: Instalación de energía eólica que comprende un rotor con palas de rotor ajustables para accionar un generador , con un dispositivo de ajuste para […]
 Sistema y método de limitación de la corriente de inducido en caso de defecto en máquinas síncronas, del 4 de Julio de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Sistema y método de limitación de la corriente de inducido en caso de defecto en máquinas síncronas excitadas mediante un regulador de tensión . El método comprende:
- […]
Sistema y método de limitación de la corriente de inducido en caso de defecto en máquinas síncronas, del 4 de Julio de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Sistema y método de limitación de la corriente de inducido en caso de defecto en máquinas síncronas excitadas mediante un regulador de tensión . El método comprende:
- […]
 Circuito para controlar la velocidad de un motor tubular de corriente continua con escobillas, del 28 de Agosto de 2012, de HANGZHOU SHTECH CO., LTD. (100.0%): 1. Circuito para controlar la velocidad de un motor tubular de corriente continua con escobillas, caracterizado porque comprende un bucle de control cuyo extremo de salida […]
Circuito para controlar la velocidad de un motor tubular de corriente continua con escobillas, del 28 de Agosto de 2012, de HANGZHOU SHTECH CO., LTD. (100.0%): 1. Circuito para controlar la velocidad de un motor tubular de corriente continua con escobillas, caracterizado porque comprende un bucle de control cuyo extremo de salida […]
DISPOSITIVO DE REGULACION PARA GRUPO MOTOVENTILADOR DE APARATOS DE CALEFACCION Y/O CLIMATIZACION., del 16 de Noviembre de 1999, de VALEO CLIMATIZACION, S.A.: Dispositivo de regulación para grupo motoventilador de aparatos de calefacción y/o climatización. Comprende medios de conmutación del grupo motoventilador y se caracteriza […]
UN APARATO PARA CONTROLAR COCHES ELECTRICOS, del 1 de Febrero de 1985, de MITSUBISHI DENKI KABUSHIKI KAISHA: APARATO PARA CONTROLAR COCHES ELECTRICOS.CONSTA DE: MOTORES DE CORRIENTE CONTINUA EN DERIVACION; UN PRIMER INTERRUPTOR PERIODICO (CH1, CH2) QUE CONTROLA LAS CORRIENTES […]
UNIDAD DE CONTROL DE CORTOCIRCUITO PARA UN PUENTE DE TIRISTORES., del 1 de Marzo de 1984, de ELEVATOR GMBH: UNIDAD DE CONTROL DE CORTOCIRCUITO PARA PUENTE DE TIRISTORES.LA UNIDAD COMPRENDE DISPOSITIVOS ELECTRONICOS DE MEDICION DE INTENSIDAD DE […]
 DISPOSICIÓN DE CIRCUITO Y PROCEDIMIENTO PARA HACER FUNCIONAR UN MOTOR ELÉCTRICO CON NÚMERO DE REVOLUCIONES VARIABLE EN UNA FUENTE DE TENSIÓN CONTINUA, del 24 de Junio de 2011, de ROBERT BOSCH GMBH: Disposición de circuito para hacer funcionar un motor eléctrico con número de revoluciones variable en una fuente de tensión continua, en especial para hacer funcionar […]
DISPOSICIÓN DE CIRCUITO Y PROCEDIMIENTO PARA HACER FUNCIONAR UN MOTOR ELÉCTRICO CON NÚMERO DE REVOLUCIONES VARIABLE EN UNA FUENTE DE TENSIÓN CONTINUA, del 24 de Junio de 2011, de ROBERT BOSCH GMBH: Disposición de circuito para hacer funcionar un motor eléctrico con número de revoluciones variable en una fuente de tensión continua, en especial para hacer funcionar […]