Control de ascensor con respecto a los rellanos.
Método de control de ascensor, en el que el motor de un ascensor es controlado de tal manera que la velocidaddel ascensor sigue una velocidad de referencia,
y que, cuando el ascensor está desacelerando, el motor escontrolado por un método de ajuste de velocidad durante la fase de desaceleración inicial y que el motor escontrolado mediante un método de ajuste de posición durante la fase de desaceleración final, caracterizado porqueel momento de transición entre el ajuste de velocidad y el ajuste de posición se determina sustancialmente pormedio de la curva de velocidad del ascensor.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FI2004/000088.
Solicitante: KONE CORPORATION.
Nacionalidad solicitante: Finlandia.
Dirección: KARTANONTIE 1 00330 HELSINKI FINLANDIA.
Inventor/es: JAHKONEN, PEKKA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66B1/40 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › B66B 1/00 Sistemas de control de ascensores en general (dispositivos de seguridad B66B 5/00; control del funcionamiento de la puerta o barrera B66B 13/00). › y para corregir la nivelación en los descansillos o paradas.
PDF original: ES-2385216_T3.pdf
Fragmento de la descripción:
Control de ascensor con respecto a los rellanos La presente invención se refiere a un método de control de ascensor como se define en el preámbulo de la reivindicación 1 y a un aparato para controlar un ascensor como se define en el preámbulo de la reivindicación 5.
En mecanismos de accionamiento avanzados de ascensores de corriente alterna, el motor se controla generalmente mediante un convertidor de frecuencia, que se utiliza para ajustar el par y la velocidad de rotación del motor. Se puede considerar que un desplazamiento de ascensor individual consta de una salida, una aceleración, una parte de velocidad constante, una desaceleración y una parada en un rellano. El motor se controla normalmente mediante el uso de una velocidad de referencia tal que el ascensor va a seguir una curva de velocidad predeterminada con la mayor precisión posible. Una tarea importante en el funcionamiento del ascensor es detener la cabina del ascensor exactamente en el rellano sin cambios bruscos de velocidad o sin necesidad de mover la cabina en la dirección inversa.
Por lo general, cuando se va a detener un ascensor, se utiliza una desaceleración constante, y justo antes de la parada, la desaceleración cambia a un régimen de cambio o sobreaceleración preseleccionado para lograr un redondeo final de la curva de velocidad. Este método funciona bien si el ascensor sigue con precisión la velocidad de referencia.
En la técnica anterior, existen soluciones diseñadas para hacer que el ascensor siga la curva de velocidad lo más exactamente posible hasta el final de la desaceleración. Esta solución se describe por ejemplo en la solicitud de patente internacional PCT/FI97/00265. Sin embargo, la solución que se describe en esta publicación es complicada y no puede por tanto ser aplicada en todos los mecanismos de accionamiento de ascensor.
Sin embargo, cuando se utiliza un control de par en un ascensor, seguir la velocidad de referencia es difícil porque el control de par determina el par total del sistema. El aumento del avance aumenta el par, pero esto da lugar a problemas de estabilidad.
El documento US 3.785.463 describe un método para controlar la velocidad de una cabina, en concreto durante la fase final de aproximación a un rellano. Durante el desplazamiento, una señal de velocidad es utilizada como patrón de control para la velocidad de la cabina. Comenzando por una distancia dada al rellano, la señal de velocidad está integrada para obtener una señal de desplazamiento que se utiliza como el patrón de control durante la aproximación final al rellano.
El documento JP 02163276 describe un método en el que durante la aproximación de una cabina de ascensor a un rellano, se utiliza un patrón de velocidad que es inversamente proporcional a la distancia entre la posición de la cabina en ese momento y el rellano.
El objeto de la presente invención es desarrollar un nuevo método para controlar un motor de corriente alterna para su uso en un ascensor, un método que sea simple de aplicar y que permita que una cabina de ascensor se detenga de manera fiable, exactamente en un nivel de planta. Para lograr esto, el método de la invención se caracteriza por las características descritas en la reivindicación 1. Del mismo modo, el aparato de la invención se caracteriza por las características descritas en la la reivindicación 5. Otras realizaciones específicas de la invención se caracterizan por las características descritas en las reivindicaciones dependientes.
Mediante la solución de la invención, en la fase final antes de que la cabina se detenga en el rellano, el motor es controlado mediante el uso de una posición de referencia. Esto da como resultado un ajuste simple y fiable que depende directamente de la distancia a la posición de parada deseada. Durante el resto de la curva de desplazamiento, se controla una velocidad de referencia, utilizando así las ventajas del ajuste de velocidad.
De acuerdo con una realización preferida, cuando el ascensor está desacelerando, el motor es controlado por un método de ajuste de velocidad en la fase final de desaceleración, y en la fase final de desaceleración, el motor es controlado mediante un método de ajuste de posición, y el momento de transición entre el ajuste de velocidad y el ajuste de posición se determina sustancialmente mediante la curva de velocidad del ascensor. El método de la invención no tiene efecto sobre el tiempo de desplazamiento normal del ascensor, y tampoco hace que el control durante el desplazamiento real sea más complicado.
De acuerdo con una segunda realización preferida, el valor instantáneo de la curva de velocidad se controla continuamente y el método de control del motor se determina utilizando el valor instantáneo de la curva de velocidad.
De acuerdo aún con otra realización del método, la distancia restante a la posición de parada se controla continuamente y el método de control del motor se determina utilizando esta distancia restante.
De acuerdo con otra realización, cuando el ascensor está desacelerando, el motor es controlado por un método de ajuste de velocidad hasta que se alcanza un punto en el que la relación entre la aceleración y la velocidad es la misma que la relación entre la distancia restante y la velocidad, y en este punto, el control se cambia a un ajuste de posición. De este modo, se consigue un método de control que es independiente de otros parámetros de accionamiento.
Un aparato para controlar un ascensor de acuerdo aún con otra realización de la invención, comprende un medio para permitir que el motor del ascensor sea controlado en base a los datos de posición y un medio con el cual se puede hacer una selección en cuanto a si el ascensor va a ser controlado mediante una velocidad de referencia o mediante una posición de referencia.
A continuación, la invención se describirá en detalle con referencia a una realización y a los dibujos adjuntos, en los que La figura 1 ilustra la desaceleración final de la curva de velocidad, y La figura 2 es una representación esquemática de un sistema de control que aplica el método de la invención.
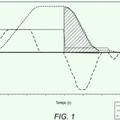
Según la figura 1, en funcionamiento normal, la curva de desplazamiento del ascensor comprende una aceleración inicial, una fase de aceleración constante, una parte de velocidad constante, una fase de desaceleración constante y una desaceleración final. En la fase de desaceleración, la velocidad del ascensor se reduce con una desaceleración constante que está representada por una parte Va de la curva de velocidad en la figura 1. En la fase de desaceleración constante, como es bien sabido, la ecuación v1=a* t1, en la que a es la desaceleración y t es el tiempo, se aplica para la velocidad, y la ecuación s1=1/2*a*t12 se aplica para la distancia. Es decir, cuando el ascensor llega con desaceleración constante hasta pararse, se desplaza una distancia de s1=1/2*a*t 12 en el tiempo t1. Si se añade un redondeo final a la curva de velocidad al final de la fase de desaceleración, en cuyo caso el cambio en la desaceleración, es decir la sobreaceleración, es constante, y se elige un valor de sobreaceleración de manera que la distancia de frenado se duplique, es decir, s2=2*s1=a*t12, entonces se puede determinar la velocidad. Por ejemplo, si la velocidad cae exponencialmente y el redondeo final se inicia en el momento t=1/c=s1/v2= v1/a, entonces los valores de velocidad, desaceleración y distancia desde el rellano se convierten simultáneamente en cero con una gran precisión. En esta situación, se aplican las ecuaciones siguientes:
v=v1*e-c*t
, d=1/c*v, a=-c*v
Así, la figura 1 ilustra la definición del momento del tiempo en el que se produce la transición entre el ajuste de velocidad y el ajuste de posición. El momento sugerido es el momento en el que la distancia restante (a1 + a2) es igual a dos veces la distancia a1 que el ascensor tendría que recorrer si no se hiciera redondeo final.
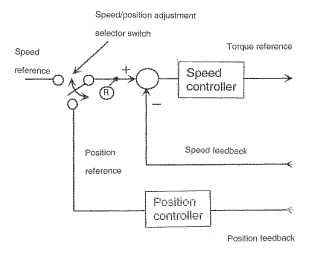
La figura 2 representa un sistema de control de motor que aplica la función de la invención. La relación entre la velocidad y la aceleración del ascensor se compara con la relación entre la distancia restante y la velocidad. Cuando estas dos relaciones son iguales, el control se cambia de la fase de desaceleración constante a la desaceleración final y la velocidad es controlada de acuerdo con la función exponencial v=v1*e-c*t. Según la figura 2, la transición a la posición de ajuste se lleva a cabo conectando la señal de valor... [Seguir leyendo]
Reivindicaciones:
1. Método de control de ascensor, en el que el motor de un ascensor es controlado de tal manera que la velocidad del ascensor sigue una velocidad de referencia, y que, cuando el ascensor está desacelerando, el motor es controlado por un método de ajuste de velocidad durante la fase de desaceleración inicial y que el motor es controlado mediante un método de ajuste de posición durante la fase de desaceleración final, caracterizado porque el momento de transición entre el ajuste de velocidad y el ajuste de posición se determina sustancialmente por medio de la curva de velocidad del ascensor.
2. Método según la reivindicación 1, caracterizado porque el valor instantáneo de la curva de velocidad se controla continuamente y el método de control del motor se determina utilizando el valor instantáneo de la curva de velocidad.
3. Método según la reivindicación 1 ó 2, caracterizado porque la distancia restante hasta la posición de parada se 15 controla continuamente y el método de control del motor se determina utilizando esta distancia restante.
4. Método según cualquiera de las reivindicaciones 1 a 3, caracterizado porque, cuando el ascensor está desacelerando, el motor se controla mediante el método de ajuste de velocidad hasta que se alcanza un punto en el que la relación entre la aceleración y la velocidad es la misma que la relación entre la distancia restante y la velocidad, y porque en este punto el control se cambia a un ajuste de posición.
5. Aparato para controlar un motor de ascensor que aplica el método según una de las reivindicaciones precedentes.
Punto de selección de ajuste de velocidad/posición
Patentes similares o relacionadas:
Gestión de la operación de frenos en ascensores, del 13 de Noviembre de 2019, de OTIS ELEVATOR COMPANY: Un procedimiento que comprende: determinar que una cabina de ascensor de un sistema de ascensor se está acercando a un rellano ; obtener, por un […]
Procedimiento, unidad de control de ascensor, y sistema de ascensor para ajustar dinámicamente un límite de velocidad de nivelación de una cabina de ascensor, del 2 de Octubre de 2019, de KONE CORPORATION: Un procedimiento para ajustar dinámicamente un límite de velocidad de nivelación de una cabina de un ascensor durante una operación de nivelación, el procedimiento […]
Amortiguación activa de la oscilación vertical de una cabina de ascensor suspendido, del 3 de Julio de 2019, de OTIS ELEVATOR COMPANY: Un sistema para amortiguar las oscilaciones verticales de una cabina de ascensor suspendida en un rellano , cuyo sistema comprende: […]
Dispositivo y método para controlar un sistema hidráulico, especialmente de un elevador, del 17 de Enero de 2018, de YASKAWA Europe GmbH: Dispositivo de control para control de presión en un sistema hidráulico , especialmente de un sistema de elevador , el dispositivo de control […]
Procedimiento para accionar un dispositivo de control de ascensor, del 28 de Septiembre de 2016, de INVENTIO AG: Procedimiento para el funcionamiento de un dispositivo de control del ascensor previsto para el control y supervisión de los movimientos de al menos una […]
 Funcionamiento en curva de pico de confort, del 20 de Enero de 2016, de Control Techniques Ltd: Un método de control del desplazamiento de una carga desde una posición inicial conocida hasta una posición de destino conocida, en el que el […]
Funcionamiento en curva de pico de confort, del 20 de Enero de 2016, de Control Techniques Ltd: Un método de control del desplazamiento de una carga desde una posición inicial conocida hasta una posición de destino conocida, en el que el […]
 Detector de junta de carril de ascensor y sistema de ascensor, del 20 de Marzo de 2012, de MITSUBISHI DENKI KABUSHIKI KAISHA: Un dispositivo de detección de junta o unión de carriles que comprende:
una parte de detección de junta o unión enfrente de un carril de guía , […]
Detector de junta de carril de ascensor y sistema de ascensor, del 20 de Marzo de 2012, de MITSUBISHI DENKI KABUSHIKI KAISHA: Un dispositivo de detección de junta o unión de carriles que comprende:
una parte de detección de junta o unión enfrente de un carril de guía , […]
 METODO Y SISTEMA PARA MEDIR LA PRECISION CON QUE SE DETIENE UNA CABINA DE ASCENSOR, del 1 de Enero de 2009, de KONE CORPORATION: Un método de vigilancia de una condición, para medir la precisión con que se detiene una cabina de ascensor, cuyo método comprende los pasos de: definir una zona de […]
METODO Y SISTEMA PARA MEDIR LA PRECISION CON QUE SE DETIENE UNA CABINA DE ASCENSOR, del 1 de Enero de 2009, de KONE CORPORATION: Un método de vigilancia de una condición, para medir la precisión con que se detiene una cabina de ascensor, cuyo método comprende los pasos de: definir una zona de […]