SOPORTE DE HERRAMIENTA QUE PERMITE EVITAR UN OBSTACULO EN UNA FILA.
Soporte de herramienta susceptible de trasladarse según una dirección sustancialmente paralela a una fila (10),
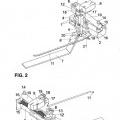
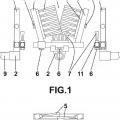
de manera que se mantiene una herramienta (16) al nivel del eje de dicha fila (10) entre obstáculos (12), comprendiendo dicho soporte un primer brazo (20), un segundo brazo (22) del cual un primer extremo está articulado según un primer eje (24) de rotación a un primer extremo distal del primer brazo (20), un tercer brazo (26) al cual está unida la herramienta (16) del cual un primer extremo está articulado, según un segundo eje (28) de rotación sustancialmente paralelo al primer eje (24), al segundo extremo del segundo brazo (22), y un cuarto brazo (30) del cual un primer extremo está articulado, según un tercer eje (32) de rotación sustancialmente paralelo al primer eje (24), al segundo extremo del tercer brazo (26), y del cual el segundo extremo está articulado, según un cuarto eje (34) de rotación sustancialmente paralelo al primer eje (24), a un segundo extremo del primer brazo (20), siendo dicho soporte susceptible de ocupar un primer estado en el que la herramienta (16) está dispuesta al nivel del eje de la fila y un segundo estado en el que la herramienta (16) está separada del eje de la fila, comprendiendo también dicho soporte unos medios de detección (44) de un obstáculo y al menos un accionador neumático (54) controlado por dichos medios de detección (44) garantizando al menos el mantenimiento del soporte en el segundo estado, caracterizado porque dicho al menos un accionador neumático (54) está intercalado entre el primer brazo (20) y una prolongación (62) del segundo brazo (22) dispuesta en el lado opuesto al segundo eje (28) de rotación con respecto al primer eje de rotación (24)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08305836.
Solicitante: SOUSLIKOFF ET CIE.
Nacionalidad solicitante: Francia.
Dirección: 2, ROUTE DE QUEYZANS 33340 SAINT YZANS DE MÉDOC FRANCIA.
Inventor/es: Souslikoff,Dominique.
Fecha de Publicación: .
Fecha Solicitud PCT: 25 de Noviembre de 2008.
Clasificación Internacional de Patentes:
- A01B13/06 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01B TRABAJO DE LA TIERRA EN AGRICULTURA O EN SILVICULTURA; PARTES CONSTITUTIVAS O ACCESORIOS DE MAQUINAS O INSTRUMENTOS AGRICOLAS, EN GENERAL (apertura o recubrimiento de surcos o de hoyos para la siembra, plantación o abonado A01C 5/00; máquinas para la recogida de raíces o tubérculos A01D; segadoras convertibles en aparatos para trabajo de la tierra o capaces de trabajar la tierra A01D 42/04; segadoras combinadas con instrumentos para trabajo de la tierra A01D 43/12; trabajo de la tierra para obras públicas o explotaciones mineras E01, E02, E21). › A01B 13/00 Arados o máquinas similares para trabajos especiales (para drenaje E02B 11/02). › Dispositivos para prevenir el dañado de las cepas o de troncos similares.
- A01B39/16 A01B […] › A01B 39/00 Otras máquinas especialmente destinadas al trabajo de tierras cultivadas. › para el trabajo en viñedos, huertos o similares.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2364996_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un soporte de herramienta que permite evitar un obstáculo en una fila. Se refiere asimismo a un dispositivo para regular automáticamente la profundidad de trabajo del suelo de una herramienta, más particularmente adaptado al soporte de herramienta de la invención para una descaballonadora.
Una descaballonadora comprende una reja que remueve la tierra en una baja profundidad entre las cepas de la viña de una misma fila con el fin en particular de realizar un control de la maleza de tipo mecánico. Según los casos, una descaballonadora está conectada a un chasis remolcado mediante un vehículo motorizado o portada directamente por el vehículo motorizado.
Para permitir evitar las cepas, se conocen varias soluciones.
La primera solución consiste en conectar la reja a un primer lado de un paralelogramo deformable en un plano sustancialmente paralelo al suelo. Están previstos unos medios de recuperación para mantener el paralelogramo en una posición denominada de trabajo. Una caña es solidaria a uno de los lados de dicho paralelogramo, en particular opuesto al que soporta la herramienta, siendo dicha caña susceptible de apoyarse contra las cepas con el fin de provocar la deformación de dicho paralelogramo contra los medios de recuperación y la separación de la herramienta del eje de la fila. Esta solución adolece del inconveniente de generar esfuerzos relativamente importantes al nivel de las cepas para generar la deformación del paralelogramo.
Con el fin de evitar este inconveniente, otra solución consiste en ayudar al movimiento de separación de la herramienta gracias a un accionador hidráulico de doble efecto. Así, el soporte de herramienta comprende un palpador susceptible de entrar en contacto con las cepas, un sensor susceptible de detectar un movimiento del palpador cuando entra en contacto con una cepa y un accionador hidráulico susceptible de garantizar el desplazamiento de la herramienta entre una posición denominada de trabajo al nivel del eje de la fila y una posición de evitación, separándose la herramienta del eje de la fila.
Según un primer modo de realización, el soporte de herramienta comprende un paralelogramo deformable en un plano sustancialmente paralelo al suelo, siendo la herramienta solidaria a un lado de dicho paralelogramo. El cuerpo del accionador hidráulico está unido a un primer lado y su vástago a otro lado. Por tanto, la traslación del vástago provoca la deformación del paralelogramo. Para controlar el accionador hidráulico, se prevé un distribuidor de doble efecto, correspondiendo un primer estado del distribuidor al vástago sacado y un segundo estado al vástago introducido. El palpador es móvil con respecto al soporte y se mantiene en una primera posición gracias a medios de recuperación. Cuando el palpador entra en contacto con un obstáculo (cepa o estaca), se mueve ligeramente contra los medios de recuperación. Este débil movimiento es detectado por el sensor que informa al distribuidor que cambia entonces de estado provocando el desplazamiento del vástago, la deformación del paralelogramo y la separación de la herramienta del eje de la fila. Cuando el palpador ya no está en contacto con un obstáculo (cepa o estaca), los medios de recuperación provocan el desplazamiento de dicho palpador hacia la posición de reposo. Este débil movimiento es detectado por el sensor que informa al distribuidor que cambia entonces de estado provocando el desplazamiento del vástago, la deformación del paralelogramo y el retorno de la herramienta al nivel del eje de la fila.
Según otro modo de realización, el accionador hidráulico es de tipo rotativo y la herramienta está unida a un brazo susceptible de pivotar gracias a dicho accionador de manera que se separa la herramienta del eje de la fila. También en este caso, el soporte comprende un palpador, un sensor y un distribuidor de doble efecto.
Aunque funcionan relativamente bien, estos dispositivos no proporcionan una completa satisfacción ya que son relativamente complejos debido a la utilización de un accionador y de un distribuidor de doble efecto y debido a la utilización de aceite como fluido que puede ser contaminante en caso de escape.
Los documentos FR-1362750, FR-2104685 y FR-2290828 describen unas descaballonadoras que comprenden cada una un paralelogramo deformable cuya deformación se controla mediante un accionador de tipo neumático. No obstante, las soluciones propuestas por estos documentos no son satisfactorias ya que la disposición del paralelogramo deformable y del accionador no permite una optimización del soporte en cuanto a la potencia del accionador y al volumen.
Según otra limitación asociada al control de la maleza de tipo mecánico, la calidad depende esencialmente de la regularidad de la profundidad de trabajo de la herramienta. Para obtener una calidad óptima, la reja o la cuchilla deben trabajar el suelo a una altura del orden de 5 cm. Si la profundidad de trabajo no es suficiente, las raíces de la vegetación permanecen en el suelo no trabajado de tal modo que la vegetación reaparece rápidamente. En el caso contrario, si la profundidad de trabajo es excesiva, las raíces de la vegetación se remueven con demasiada tierra no permitiendo que se sequen, de tal modo que la vegetación también reaparece rápidamente.
Por consiguiente, la altura de trabajo debe regularse de manera precisa. Aunque existen medios de regulación de la altura de la herramienta, estos últimos son mecánicos y se regulan por el usuario al comienzo de cada fila.
Al no ser el suelo regular a lo largo de una fila, la profundidad de trabajo de la herramienta debería ajustarse regularmente a lo largo de la fila. Ahora bien, el usuario difícilmente puede dirigir de manera simultánea su instrumento y regular de manera casi continua la profundidad de trabajo. Además, la calidad de control de la maleza está asociada a la destreza del usuario lo que no es satisfactorio.
Cuando se utilizan dos herramientas simultáneamente para trabajar dos filas con relieves diferentes, con una eventual inclinación, durante un mismo paso, esta regulación manual es casi imposible.
En el campo agrícola, se conocen sistemas que permiten ajustar la profundidad de trabajo del suelo, en particular en el campo de la labranza. Según un modo de realización, un arado está unido a un tractor por medio de un enganche de tres puntos que comprende un dispositivo de levantamiento. Para regular la profundidad de trabajo, están previstos unos medios para medir el esfuerzo de la herramienta sobre el dispositivo de levantamiento y ajustar su altura en función del esfuerzo medido que debe oscilar en un intervalo de valores. Si el esfuerzo medio supera el valor máximo del intervalo entonces se transmite una orden con el fin de elevar el sistema de levantamiento y reducir la profundidad de trabajo de las rejas del arado. En el caso contrario, si el esfuerzo medido es inferior al valor mínimo del intervalo,entonces se transmite una orden con el fin de bajar el sistema de levantamiento y aumentar la profundidad de trabajo de las rejas del arado.
Aunque permite regular la profundidad de manera automática, esta solución no es satisfactoria ya que necesita un vehículo motorizado equipado con un sistema de levantamiento particular y no permite regular independientemente dos herramientas. Finalmente, esta solución no permite regular de manera óptima la profundidad de trabajo en el caso de una descaballonadora, perturbándose la medición del esfuerzo al evitar las cepas en particular por el peso y la inercia del chasis en movimiento.
En el campo agrícola, también se conocen sistemas que permiten regular en altura de manera independiente elementos de una sembradora. Según un modo de realización, cada elemento de la sembradora puede pivotar alrededor de un eje horizontal y comprende un rodillo seguidor previsto para rodar sobre el suelo. Al rodar, el rodillo sigue el relieve del suelo y hace pivotar eventualmente el elemento alrededor del eje horizontal con el fin de que las semillas se dispongan sustancialmente a la misma profundidad.
Esta solución no es satisfactoria en el caso una descaballonadora debido a la desviación entre el rodillo seguidor y la herramienta, lo que conduce a una zona de tierra no trabajada alrededor de cada cepa importante.
El documento US nº 5.957.218 describe una enseñanza relativamente próxima aplicada a una grada. Según este documento, la grada comprende varios elementos cuyas posiciones con respecto al suelo de... [Seguir leyendo]
Reivindicaciones:
1. Soporte de herramienta susceptible de trasladarse según una dirección sustancialmente paralela a una fila (10), de manera que se mantiene una herramienta (16) al nivel del eje de dicha fila (10) entre obstáculos (12), comprendiendo dicho soporte un primer brazo (20), un segundo brazo (22) del cual un primer extremo está articulado según un primer eje (24) de rotación a un primer extremo distal del primer brazo (20), un tercer brazo (26) al cual está unida la herramienta (16) del cual un primer extremo está articulado, según un segundo eje (28) de rotación sustancialmente paralelo al primer eje (24), al segundo extremo del segundo brazo (22), y un cuarto brazo
(30) del cual un primer extremo está articulado, según un tercer eje (32) de rotación sustancialmente paralelo al primer eje (24), al segundo extremo del tercer brazo (26), y del cual el segundo extremo está articulado, según un cuarto eje (34) de rotación sustancialmente paralelo al primer eje (24), a un segundo extremo del primer brazo (20), siendo dicho soporte susceptible de ocupar un primer estado en el que la herramienta (16) está dispuesta al nivel del eje de la fila y un segundo estado en el que la herramienta (16) está separada del eje de la fila, comprendiendo también dicho soporte unos medios de detección (44) de un obstáculo y al menos un accionador neumático (54) controlado por dichos medios de detección (44) garantizando al menos el mantenimiento del soporte en el segundo estado, caracterizado porque dicho al menos un accionador neumático (54) está intercalado entre el primer brazo
(20) y una prolongación (62) del segundo brazo (22) dispuesta en el lado opuesto al segundo eje (28) de rotación con respecto al primer eje de rotación (24).
2. Soporte de herramienta según la reivindicación 1, caracterizado porque el accionador (54) comprende un cuerpo cuyo extremo al nivel del cual sale su vástago (60) está montado pivotante alrededor de un eje (58) solidario al primer brazo (20), estando unido el extremo del vástago (60) a la prolongación (62).
3. Soporte de herramienta según la reivindicación 1 ó 2, caracterizado porque comprende unos medios de recuperación (38) que tienden a mantener dicho soporte en el primer estado, y porque el accionador neumático (54) garantiza el cambio de estado de dicho soporte y su mantenimiento en el segundo estado contra los medios de recuperación (38).
4. Soporte de herramienta según la reivindicación 3, caracterizado porque comprende una válvula (56) controlada por los medios de detección (44) que controla la alimentación de una única cámara del accionador neumático (54).
5. Soporte de herramienta según cualquiera de las reivindicaciones 1 a 4, caracterizado porque el accionador neumático (54) comprende un estrangulador regulable con el fin de ajustar la cinemática de la herramienta de la posición al nivel del eje de la fila en la posición separada.
6. Soporte de herramienta según cualquiera de las reivindicaciones anteriores, caracterizado porque los medios de detección (44) comprenden un palpador (46) susceptible de pivotar alrededor de un eje de rotación (48) solidario al segundo brazo, sustancialmente paralelo al eje de articulación (24) así como un sensor (50) que permite detectar el movimiento de pivotado de dicho palpador (46).
7. Soporte de herramienta según la reivindicación 6, caracterizado porque comprende un tope (53) contra el cual puede apoyarse el palpador (46) con el fin de ayudar mecánicamente a la deformación de dicho soporte en el segundo estado.
8. Soporte de herramienta según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende unos medios de medición (86) para medir al menos una resultante de la fuerza de reacción del suelo sobre dicha herramienta y unos medios de control (88) que ajustan la profundidad de trabajo del suelo de dicha herramienta en función de los valores medidos por dichos medios de medición (86).
9. Soporte de herramienta según la reivindicación 8, caracterizado porque comprende al menos una articulación (72, 90) que comprende dos partes móviles entre sí y porque los medios de medición (86) están intercalados entre dichas partes de manera que se cuantifica el movimiento relativo entre dichas dos partes que es sustancialmente proporcional a la fuerza de reacción del suelo sobre la herramienta (16).
10. Soporte de herramienta según la reivindicación 8 ó 9, caracterizado porque comprende al menos dos articulaciones, una primera articulación (72) que permite modificar la profundidad de trabajo de la herramienta y una segunda articulación (90) que permite determinar la fuerza de reacción del suelo sobre la herramienta.
11. Soporte de herramienta según la reivindicación 10, caracterizado porque la segunda articulación (90) comprende una parte fija (92) unida a un vehículo motorizado o a un chasis unido a un vehículo motorizado y una parte móvil
(94) solidaria a la herramienta (16), siendo las dos partes (92, 94) móviles una con respecto a la otra según un eje de pivotado (96) sustancialmente paralelo al suelo y perpendicular a la dirección de avance.
12. Soporte de herramienta según cualquiera de las reivindicaciones 8 a 11, caracterizado porque los medios de medición (86) se presentan en forma de un extensómetro.
13. Soporte de herramienta según cualquiera de las reivindicaciones 8 a 12, caracterizado porque los medios de control (88) realizan una media de mediciones sucesivas y corrigen la profundidad de la herramienta en función de esta media.
14. Soporte de herramienta según la reivindicación 13, caracterizado porque los medios de control (88) modifican la profundidad de la herramienta en función por un lado de la desviación entre la media y el valor de la consigna y por otro lado de una constante de regulación de la reactividad predeterminada por el usuario, siendo la duración del impulso igual a la desviación dividida entre la constante de regulación.
Patentes similares o relacionadas:
DISPOSITIVO PALPADOR PARA DETECCIÓN DE POSTES METÁLICOS, del 10 de Octubre de 2019, de INDUSTRIAS DAVID, S.L.U: Dispositivo palpador para detección de postes metálicos, con al menos un primer mecanismo en un lateral de los medios de actuación de la máquina, que comprende […]
DISPOSITIVO PALPADOR PARA DETECCIÓN DE POSTES METÁLICOS, del 4 de Octubre de 2019, de INDUSTRIAS DAVID, S.L.U: Dispositivo palpador para detección de postes metálicos, con al menos un primer mecanismo en un lateral de los medios de actuación […]
Trituradora, del 1 de Junio de 2016, de Braun Maschinenbau GmbH: Dispositivo para mantener corta la vegetación del suelo entre hileras de plantas paralelas, en particular hileras de viñedos o plantas frutales, […]
 Arado entre hileras combinado, del 15 de Septiembre de 2015, de DEZA CABELLO, Jorge: 1. Arado entre hileras combinado, de los que mediante la información que recibe de una varilla copiadora, activa un distribuidor hidráulico que comanda un […]
Arado entre hileras combinado, del 15 de Septiembre de 2015, de DEZA CABELLO, Jorge: 1. Arado entre hileras combinado, de los que mediante la información que recibe de una varilla copiadora, activa un distribuidor hidráulico que comanda un […]
 DESBROTADOR MANUAL, del 28 de Agosto de 2014, de BAYA SANCHEZ, Daniel: 1. Desbrotador manual, manejable a través de un mango con bandolera , caracterizado por comprender una estructura de perfil laminado configurada […]
DESBROTADOR MANUAL, del 28 de Agosto de 2014, de BAYA SANCHEZ, Daniel: 1. Desbrotador manual, manejable a través de un mango con bandolera , caracterizado por comprender una estructura de perfil laminado configurada […]
Máquina para el labrado intercepa de la tierra, del 9 de Junio de 2014, de RINIERI S.R.L: 1. Máquina para el labrado intercepa de la tierra, aplicada de cualquier modo a un tractor (M) que se mueve entre dos filas de plantas, del tipo que comprende […]
DISPOSITIVO DE AMARRE PARA SOPORTES DE AMORTIGUACION, del 20 de Febrero de 2014, de AGROMET EJEA S.L.: 1. Dispositivo de amarre para soportes de amortiguación, caracterizado por comprender una abrazadera con una brida complementaria, destinadas por un […]
DESBROTADOR MANUAL, del 1 de Julio de 2013, de BAYA SANCHEZ, Daniel: 1. Desbrotador manual, caracterizado por comprender una base configurada en "U" mediante la disposición de dos cepillos laterales con varias filas de cerdas inclinadas […]