SISTEMA PARA UBICAR AGUJEROS DISTALES DE UN CLAVO INTRAMEDULAR.
Un sistema para ser utilizado con un clavo intramedular hueco (11) que tiene un extremo proximal (11a),
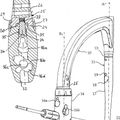
un extremo distal (11b) y al menos un agujero distal (13) formado en la pared del clavo adyacente a dicho extremo distal (11b) y que tiene un eje (H) del agujero, para detectar una ubicación de dicho agujero distal cuando se implanta el clavo en un canal intramedular de un hueso (B), comprendiendo el sistema una plantilla (12) para alinear adaptada para ser montada en dicho clavo (11), de forma que constituya un puente entre el extremo proximal (11a) de dicho clavo y un extremo distal (11b) de dicho hueso, y teniendo un cabezal (15) de colocación con un eje (G) de guía orientado generalmente perpendicular al clavo (11), adaptado para recibir en su interior al menos una broca, de forma que el eje de la broca está alineado con dicho eje (G) de guía, siendo el cabezal (15) de colocación amovible para llevar dicho eje (G) de guía a distintas posiciones espaciales con respecto a dicho eje (H) del agujero; caracterizado porque dicho sistema comprende, además, un vástago (41) de alineamiento que tiene un extremo proximal (41a) del vástago, un extremo distal (41b) del vástago, y un eje (P) del vástago, y está adaptado para ser montado en dicho cabezal (15) de colocación, de forma que dicho eje (P) del vástago está alineado con dicho eje (G) de guía y de forma que el extremo distal (41b) del vástago está orientado hacia el hueso (B), comprendiendo dicho vástago, además, una fuente colimada (45) de luz dispuesta en su extremo proximal (41a) para proyectar un haz (52) de alineamiento a lo largo de dicho eje (G) de guía en la dirección que se aleja del vástago (41) de alineamiento
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IL2007/000809.
Solicitante: L.R.S. ORTHO LTD.
Nacionalidad solicitante: Israel.
Dirección: INDUSTRIAL AREA P.O.BOX 12 12900 KATZRIN ISRAEL.
Inventor/es: LERNER,ALEXANDER, NASSONOV,ALEXANDER, DIAMANT,LEV.
Fecha de Publicación: .
Fecha Solicitud PCT: 1 de Julio de 2007.
Fecha Concesión Europea: 8 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- A61B17/17B
- A61B17/17J
- A61B19/00N
Clasificación PCT:
- A61B17/17 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Dispositivos de guiado para taladros.
- A61B19/00
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
CAMPO DE LA INVENCIÓN
La presente invención versa acerca de sistemas para detectar una ubicación de agujeros distales de un clavo intramedular implantado en un hueso.
ANTECEDENTES DE LA INVENCIÓN
En la práctica médica, se conoce desde hace tiempo, para la reparación y la estabilización quirúrgica de fracturas de huesos largos, tal como el fémur, la tibia, el húmero y el peroné, la inserción de un clavo intramedular, que es una pieza metálica tubular, de longitud apropiada en la porción interior del hueso. Normalmente, el clavo tiene un par de agujeros transversales adyacentes a su extremo proximal (agujeros proximales) y un par de agujeros transversales adyacentes a su extremo distal (agujeros distales). Para acelerar la curación del hueso, el clavo debe proporcionar una estructura rígida en torno a la que pueden adherirse las porciones rotas del hueso. Por lo tanto, el clavo debe estar fijado con respecto al hueso. La fijación del clavo se lleva a cabo por medio de tornillos o pernos que se extienden de forma transversal que están atornillados en el hueso y pasan a través del tejido circundante y a través de los agujeros transversales.
El procedimiento para insertar los tornillos requiere: (a) una ubicación precisa de los agujeros transversales en el clavo; (b) taladrar agujeros para tornillos con un alineamiento preciso con los agujeros transversales y evitar que la taladradora toque el clavo; (c) insertar los tornillos en los agujeros taladrados y a través de los agujeros transversales, de forma que se fije el clavo con respecto al hueso.
El problema siempre ha sido que una vez se inserta el clavo en el hueso, se dice que los agujeros transversales son “ciegos” en términos del alineamiento del taladro óseo que debe conseguirse. Por lo tanto, la parte más crítica de este procedimiento es determinar la ubicación desde fuera, particularmente el centro, y el eje de estos agujeros.
Para este fin, se conoce el uso de una plantilla para alinear que incluye una estructura y distintos medios de colocación, por medio de los cuales se determinan las ubicaciones aproximadas de los agujeros antes de insertar el clavo en el hueso. Para los agujeros proximales el problema se soluciona por medio de tal plantilla para alinear de forma relativamente sencilla, dado que los agujeros proximales son adyacentes a la zona de la fijación de la estructura de la plantilla para alinear y sus ubicaciones con respecto al extremo proximal del clavo casi no difieren de la ubicación determinada antes de que se insertó el clavo en el hueso.
La determinación de la ubicación de los agujeros distales es mucho más difícil, debido al hecho de que el clavo puede haber experimentado una ligera flexión o torsión durante la inserción del mismo en el hueso, de forma que los agujeros distales ya no tienen la misma ubicación con respecto al extremo proximal del clavo, como ocurría antes de su inserción.
Debido a las limitaciones mencionadas anteriormente, la mayoría de las técnicas tienen que depender de los rayos X para garantizar el alineamiento. A menudo se utiliza un arco en C para este propósito, dado que permite un control direccional del haz de rayos X. Una de las técnicas más habituales que utilizan el arco en C es una denominada “técnica de mano libre”. Esta técnica depende mucho de la experiencia y de la mano firme del cirujano. Además, la técnica implica una exposición importante del cirujano a la radiación mientras trabaja con las manos cerca del haz de rayos X.
Se han utilizado varios enfoques para determinar la ubicación de los agujeros transversales; los documentos US 4.803.976; 5.411.503; 6.129.729; 6.635.061, 6.656.189, 2006/098851 y WO 2004/069063 dan a conocer ejemplos de distintas plantillas de mira y de puntería. El documento US 5.433.720 propone una detección magnética para la ubicación de un eje central de los agujeros. Los documentos US 4.865.025; 6.207.506, 6.039.742, US 5411503 y WO 2001/89395 dan a conocer varios procedimientos para ubicar los agujeros utilizando dispositivos completamente mecánicos. El documento WO 03/105659 da a conocer un sistema robotizado que comprende un robot miniatura que sujeta una guía de taladro con elección de objetivos, que es colocada automáticamente por el robot con respecto a los agujeros distales. Por último, los documentos US 5.540.691, 5.417.688 y DE 4344470 dan a conocer un sistema óptico y un procedimiento para ubicar los agujeros distales utilizando una fuente de luz colocada adyacente a los agujeros.
RESUMEN DE LA INVENCIÓN
Según la presente invención, se proporciona un sistema para ser utilizado con un clavo intramedular hueco que tiene un extremo proximal, un extremo distal y al menos un agujero distal formado en la pared del clavo adyacente a dicho extremo distal y que tiene un eje del agujero, para detectar una ubicación de dicho agujero distal cuando el clavo está implantado en un canal intramedular de un hueso, comprendiendo el sistema:
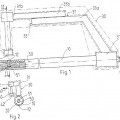
- una plantilla para alinear adaptada para ser montada en dicho clavo, de forma que se
constituye un puente entre el extremo proximal de dicho clavo y un extremo distal de dicho hueso, y que tiene un cabezal de colocación con un eje de guía orientado generalmente perpendicular al clavo, adaptado para recibir en su interior al menos una broca, de forma que el eje de la broca está alineado con dicho eje de guía, siendo amovible el cabezal de colocación para llevar dicho eje de guía a distintas posiciones espaciales con respecto a dicho eje del agujero y
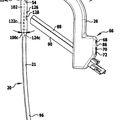
- un vástago de alineamiento que tiene un extremo proximal del vástago, un extremo distal del vástago, y un eje del vástago, y estando adaptado para ser montado en dicho cabezal de colocación, de forma que dicho eje del vástago está alineado con dicho eje de guía y de forma que extremo distal del vástago está orientado hacia el hueso, comprendiendo adicionalmente dicho vástago una fuente colimada de luz dispuesta en su extremo proximal para proyectar un haz de alineamiento a lo largo de dicho eje de guía en la dirección que se aleja del vástago de alineamiento.
El cabezal de colocación puede comprender, además un pasadizo que se extiende a lo largo de dicho eje de guía, y es coaxial con el mismo, para recibir en su interior una variedad de miembros tales como, por ejemplo, la óptica de visualización, el vástago de alineamiento, una guía de taladro para la broca y distintos tipos de trócares.
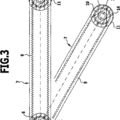
El vástago de alineamiento puede comprender, además marcas de referencia en su superficie externa visible en imágenes de rayos X. Las marcas están dispuestas en la superficie externa del vástago coaxial con el eje del vástago en ubicaciones predeterminadas a lo largo del mismo y tienen dimensiones radiales predeterminadas. Las marcas pueden tener la forma de anillos u otra forma adecuada.
La plantilla para alinear puede comprender, además, diversas porciones de soporte para la fijación de la misma al hueso y al clavo. Estas porciones pueden estar dispuestas en cualquier ubicación en la plantilla para alinear. Además, la plantilla para alinear puede comprender una unión de guía y tornillos para un ajuste aproximado y de precisión del cabezal de colocación con respecto al eje del agujero distal.
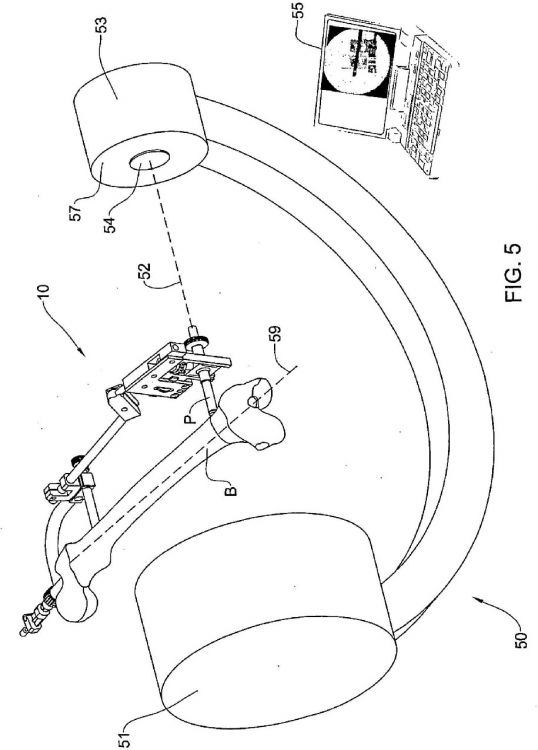
El sistema puede comprender, además, una máquina de rayos X, o puede estar adaptado para ser utilizado con la misma, tal como un arco en C que permite la toma de imágenes de rayos X del hueso con el clavo y la plantilla para alinear fijados al mismo, desde distintas posiciones angulares. Las imágenes de rayos X pueden proporcionar información tal como la disposición relativa del vástago de alineamiento con respecto al eje del agujero distal y la circularidad de los agujeros distales. El arco en C puede comprender, además, un espejo fijado a su receptor o su fuente, que, junto con el puntero láser del vástago de alineamiento, permite un alineamiento preciso del eje del arco en C con el eje del vástago de alineamiento y, por consiguiente, el eje del agujero distal.
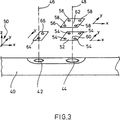
El sistema puede comprender, además, un miembro desechable que puede ser insertado en dicho clavo y que tiene una fuente de luz del clavo para emitir luz a lo largo de dicho eje del agujero distal, de forma que se crea un punto iluminado en una superficie externa de dicho hueso, siendo dicha fuente de luz del clavo de un tipo que proporciona luz colimada y, dicho miembro comprende, además, medios para la colocación de un eje de un haz colimado...
Reivindicaciones:
1.
2.
3.
4.
Un sistema para ser utilizado con un clavo intramedular hueco (11) que tiene un extremo proximal (11a), un extremo distal (11b) y al menos un agujero distal (13) formado en la pared del clavo adyacente a dicho extremo distal (11b) y que tiene un eje
(H) del agujero, para detectar una ubicación de dicho agujero distal cuando se implanta el clavo en un canal intramedular de un hueso (B), comprendiendo el sistema una plantilla (12) para alinear adaptada para ser montada en dicho clavo (11), de forma que constituya un puente entre el extremo proximal (11a) de dicho clavo y un extremo distal (11b) de dicho hueso, y teniendo un cabezal (15) de colocación con un eje (G) de guía orientado generalmente perpendicular al clavo (11), adaptado para recibir en su interior al menos una broca, de forma que el eje de la broca está alineado con dicho eje (G) de guía, siendo el cabezal (15) de colocación amovible para llevar dicho eje (G) de guía a distintas posiciones espaciales con respecto a dicho eje (H) del agujero; caracterizado porque dicho sistema comprende, además, un vástago (41) de alineamiento que tiene un extremo proximal (41a) del vástago, un extremo distal (41b) del vástago, y un eje (P) del vástago, y está adaptado para ser montado en dicho cabezal (15) de colocación, de forma que dicho eje (P) del vástago está alineado con dicho eje (G) de guía y de forma que el extremo distal (41b) del vástago está orientado hacia el hueso (B), comprendiendo dicho vástago, además, una fuente colimada (45) de luz dispuesta en su extremo proximal (41a) para proyectar un haz (52) de alineamiento a lo largo de dicho eje (G) de guía en la dirección que se aleja del vástago (41) de alineamiento.
Un sistema según la reivindicación 1, en el que el cabezal (15) de colocación tiene un pasadizo (17a) que se extiende a lo largo de dicho eje (G) de guía, y es coaxial con el mismo, para recibir en su interior dicha broca.
Un sistema según las reivindicaciones 1 o 2, que comprende, además, medios (51, 53, 55) de hardware y de software de procesamiento de imágenes de rayos X para procesar imágenes de rayos X del hueso con dicho clavo (11), dicho vástago (41) de alineamiento y al menos porciones de dicho cabezal (15) de colocación, para el cálculo de parámetros para la determinación de la posición de dicho eje (G) de guía con respecto a dicho eje (H) del agujero.
Un sistema según una cualquiera de las reivindicaciones 1 a 3, que comprende, además, un medio (22) para determinar un centro de dicho agujero proyectado a lo largo de dicho eje del agujero en una superficie externa de dicho hueso y dicha orientación del eje del agujero.
5. Un sistema según una cualquiera de las reivindicaciones 1 a 4, adaptado para ser utilizado junto con una máquina (51, 53) de rayos X con arco en C para tomar imágenes de rayos X de dicho hueso (B) con dicho clavo (11), dicho vástago (41) de alineamiento y al menos porciones de dicho cabezal (15) de colocación.
6. Un sistema según la reivindicación 5, en el que dicho arco (51, 53) en C comprende un espejo (54) adaptado para ser utilizado, junto con dicha fuente colimada (45) de luz, para alinear el eje del arco en C con el eje (P) del vástago de alineamiento.
7. Un sistema según la reivindicación 6, en el que dicha fuente colimada (45) de luz está adaptada para proyectar dicho haz (52) de alineamiento a lo largo de dicho eje (G) de guía en la dirección hacia dicho espejo (54).
8. Un sistema según una cualquiera de las reivindicaciones 1 a 7, en el que dicho vástago
(41) comprende, además, marcas (43) de referencia en su superficie externa, visibles en imágenes de rayos X, siendo coaxiales, en particular, con el eje (P) del vástago, estando dispuestas en ubicaciones predeterminadas a lo largo del mismo y que tienen dimensiones radiales predeterminadas.
9. Un sistema según una cualquiera de las reivindicaciones 2 a 8, en el que dicho cabezal
(15) de colocación comprende, además, una articulación (17) de rótula amovible en distintas posiciones espaciales con respecto a dicho eje (11) del agujero.
10. Un sistema según la reivindicación 9, en el que dicha articulación (17) de rótula es amovible a lo largo de los ejes X e Y, y dicho eje de guía está orientado a lo largo del eje Z.
11. Un sistema según las reivindicaciones 9 o 10, en el que dicha articulación (17) de rótula es bloqueable en dichas posiciones del eje (G) de guía y, por consiguiente, tiene estados bloqueado y desbloqueado.
12. Un sistema según una cualquiera de las reivindicaciones 9 a 11, en el que dicha articulación (17) de rótula comprende, además, un pasadizo que constituye dicho pasadizo (17a) del cabezal (15) de colocación.
5 13. Un sistema según la reivindicación 12, en el que dicho vástago (41) de alineamiento comprende una porción separada de su extremo distal (41b) y un eje (P) del vástago, pudiéndose montar al menos dicha porción en dicho pasadizo de la articulación (17a) de rótula, de forma que permita el desplazamiento de dicha articulación (17) de rótula mientras se encuentra en su estado desbloqueado y estando recibida en su interior dicha porción del vástago (41) de alineamiento.
14. Un sistema según una cualquiera de las reivindicaciones 4 a 13, en el que dicho medio
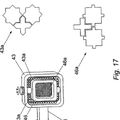
(22) es un miembro desechable (22) que puede insertarse en dicho clavo (11) y que tiene una fuente (21) de luz del clavo para emitir luz a lo largo de dicho eje (11) del agujero distal, de forma que crea un punto iluminado (26) en la superficie externa de dicho hueso (B); dicha fuente de luz del clavo es de un tipo que proporciona un haz colimado de luz a lo largo de un eje del haz y, dicho miembro comprende, además, un medio para la colocación de dicho eje del haz a lo largo de dicho eje del agujero.
20 15. Un sistema según la reivindicación 14, que comprende, además, una óptica (81) de visualización que puede montarse en dicho cabezal (15) de colocación a lo largo de dicho eje (G) de guía para la visualización de dicho punto iluminado (26).
Patentes similares o relacionadas:
INSTRUMENTOS PARA LA INSERCIÓN DE UN CLAVO INTRAMEDULAR, del 18 de Julio de 2011, de SMITH & NEPHEW, INC.: Un conjunto de escariado para crear una puerta de entrada en el canal de un hueso y proporcionar un canal de trabajo en el cual escariar el canal de hueso, […]
 DISPOSITIVO PARA LA DETERMINACIÓN DE LOS AGUJEROS DE UN CLAVO INTRAMEDULAR, del 3 de Mayo de 2011, de Sanatmetal Kft: Dispositivo auxiliar para la determinación de las posiciones de los agujeros de los clavos intramedulares , el cual contiene una unidad de fuente […]
DISPOSITIVO PARA LA DETERMINACIÓN DE LOS AGUJEROS DE UN CLAVO INTRAMEDULAR, del 3 de Mayo de 2011, de Sanatmetal Kft: Dispositivo auxiliar para la determinación de las posiciones de los agujeros de los clavos intramedulares , el cual contiene una unidad de fuente […]
 APARATO DE PUNTERÍA PARA UN CLAVO DE BLOQUEO, del 3 de Marzo de 2011, de STRYKER TRAUMA GMBH: Aparato de puntería para un clavo de bloqueo con dos circuitos oscilantes dispuestos a lo largo del sentido longitudinal […]
APARATO DE PUNTERÍA PARA UN CLAVO DE BLOQUEO, del 3 de Marzo de 2011, de STRYKER TRAUMA GMBH: Aparato de puntería para un clavo de bloqueo con dos circuitos oscilantes dispuestos a lo largo del sentido longitudinal […]
 JUEGO DE IMPLANTES, del 10 de Septiembre de 2010, de AESCULAP AG: Juego de implantes que comprende al menos dos implantes conformados de maneras distintas que comprenden respectivamente un vástago (15, […]
JUEGO DE IMPLANTES, del 10 de Septiembre de 2010, de AESCULAP AG: Juego de implantes que comprende al menos dos implantes conformados de maneras distintas que comprenden respectivamente un vástago (15, […]
 APARATO DE PUNTERIA PARA UN CLAVO PARA FRACTURAS, del 7 de Mayo de 2010, de TANTUM AG: Aparato de puntería para un clavo para fracturas , que comprende un brazo de puntería que presenta en uno de sus extremos un medio de unión para […]
APARATO DE PUNTERIA PARA UN CLAVO PARA FRACTURAS, del 7 de Mayo de 2010, de TANTUM AG: Aparato de puntería para un clavo para fracturas , que comprende un brazo de puntería que presenta en uno de sus extremos un medio de unión para […]
 APARATO PARA ALINEAR Y COLOCAR IMPLANTES EN UN CUERPO, del 4 de Marzo de 2010, de GRAMPIAN HEALTH BOARD: Un conjunto que comprende:
un fijador para la manipulación de al menos un implante para inserción en el cuerpo de un paciente; y
un dispositivo de soporte para inserción […]
APARATO PARA ALINEAR Y COLOCAR IMPLANTES EN UN CUERPO, del 4 de Marzo de 2010, de GRAMPIAN HEALTH BOARD: Un conjunto que comprende:
un fijador para la manipulación de al menos un implante para inserción en el cuerpo de un paciente; y
un dispositivo de soporte para inserción […]
 CLAVO INTRAMEDULAR CON CUERPO DE PUNTERIA, del 3 de Noviembre de 2009, de AESCULAP AG: Clavo intramedular con un vástago insertable en la cavidad medular de un hueso de caña, que presenta varios taladros pasantes de orientación diametral […]
CLAVO INTRAMEDULAR CON CUERPO DE PUNTERIA, del 3 de Noviembre de 2009, de AESCULAP AG: Clavo intramedular con un vástago insertable en la cavidad medular de un hueso de caña, que presenta varios taladros pasantes de orientación diametral […]
ATENUADOR DE HAZ DE DISCO GIRATORIO CON CUÑA VARIABLE PARA UN ENDOILUMINADOR OFTÁLMICO, del 9 de Febrero de 2012, de NOVARTIS AG: Atenuador de disco giratorio con cuña variable para su utilización en un endoiluminador oftálmico, que comprende: una cuña variable y un eje al que […]