ROBOT PORTATIL.
Robot portátil.Previsto para realizar la fase de taladro en el proceso de ensamble de componentes aeronáuticos,
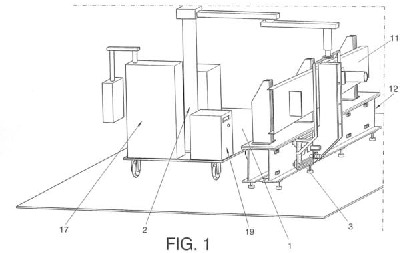
para lo que éstos se fijan mediante útiles de precisión en una grada (12); caracterizado por comprender una plataforma desplazable (1) para ubicarla próxima a la grada (12), y en la que se incluye un manipulador ingrávido (2) que soporta un bastidor (3) dotado de una columna (4) que soporta un cabezal de taladro (7) desplazable en los tres ejes. Comprende medios de fijación (13, 14) del bastidor (3) a la grada (12) para realizar diferentes taladros cuando el bastidor (3) está fijado a la grada (12) mediante el gobierno de la cabeza de taladro (7) mediante un control numérico.Incluye medios de reptado para desplazar el conjunto del bastidor (3) y columna (4) sobre la grada (12) y permitir fijar el bastidor en una nueva posición para realizar un nuevo grupo de taladros repitiendo este proceso consecutivamente hasta completar la pieza
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200701801.
Solicitante: AIRBUS OPERATIONS, S.L.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: SAENZ FERNANDEZ,AGUSTIN J., COLLADO JIMENEZ, VALENTIN, ASTORGA RAMIREZ,JUAN RAMON, GONZALEZ SAINZ,JAVIER.
Fecha de Solicitud: 27 de Junio de 2007.
Fecha de Publicación: .
Fecha de Concesión: 8 de Febrero de 2011.
Clasificación Internacional de Patentes:
- B23B41/00C1
- B23Q9/00C
Clasificación PCT:
- B23B41/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23B TORNEADO; TALADRADO (usando un electrodo en lugar de una herramienta B23H, p.ej. haciendo agujeros B23H 9/14; trabajando con un haz de laser B23K 26/00; dispositivos para copiar o controlar B23Q). › Máquinas o dispositivos para escariar o taladrar especialmente adaptados para un trabajo particular; Accesorios especialmente concebidos a estos fines.
- B23Q9/00 B23 […] › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › Dispositivos para el soporte o el guiado de aparatos o máquinas portátiles para el trabajo del metal (para el aterrajado de tubos B23B 41/08; especialmente concebidos para la perforación B23B 45/14).
Fragmento de la descripción:
Robot portátil.
Objeto de la invención
El robot portátil de la invención está previsto para realizar la fase de taladro que se practica en el montaje o ensamble de componentes aeronáuticos, para lo que éstos se fijan mediante utillajes de precisión sobre un soporte conocido convencionalmente como grada; y que tiene por objeto permitir realizar el desplazamiento del robot hasta el lugar en el que se encuentra la grada, sobre la que se fija para realizar los diferentes taladros.
Es otro objeto de la invención el permitir que el robot pueda avanzar de forma automática a lo largo de dichas gradas fijándose en diferentes posiciones previstas en las mismas para realizar la totalidad de taladros de la pieza a montar.
En particular la invención es aplicable en el taladro que se realiza en el montaje de grandes estructuras aeronáuticas como son largueros de alas, estabilizadores y superficies de control, pero obviamente puede ser empleado en el montaje de cualquiera de las piezas de un avión. La invención además es aplicable sobre los diferentes modelos de gradas existentes.
Antecedentes de la invención
En el montaje de grandes estructuras aeronáuticas, tales como los largueros, se emplean soportes conocidos como gradas en los que se fijan los largueros mediante utillajes de fijación y soportes y a través de distintos taladros realizados previamente en la propia pieza. Una vez montada la pieza en la grada, se efectúa una etapa de taladrado que generalmente se realiza mediante trabajo manual, para lo que se emplea un conjunto elevado de costosas plantillas para posicionamiento de precisión de las herramientas manuales o semiautomáticas utilizadas por los operarios para realizar los taladros.
Los procesos manuales son deficientes en términos de productividad y de coste global de proceso por lo que progresivamente se están implantando procesos de automatización para la realización de los taladros de forma que se reduzcan los tiempos de taladrado. Cabe señalar que esta fase del proceso de ensamblaje es una etapa de larga duración al tener típicamente cada producto miles de agujeros, con lo que los ahorros de tiempo de producción totales pueden llegar a ser notables.
Los sistemas de automatización que se están implementando consisten en grandes máquinas multi-axiales fijadas al suelo de la planta sobre una fundación de obra civil. Las inversiones necesarias para estas máquinas son generalmente bastantes altas, y también presentan una serie de limitaciones operacionales.
Este tipo de maquinaria requiere una gran cantidad de espacio en planta permanentemente, y además precisa que el producto, con su utillaje, a ser procesado ha de ser llevado a la zona de trabajo de la máquina. Además de este inconveniente, debido a su tamaño y grandes volúmenes de trabajo es difícil para este tipo de máquinas mantener tolerancias de posicionamiento estrechas en todo su rango de movimientos en todos los ejes de la misma, al tener que realizar miles de taladros desde su ubicación fija, en los que los taladros de un extremo se encuentran separados grandes distancias respecto a los del otro. Por tanto surge la necesidad de referenciar y calibrar la máquina a la pieza varias veces durante el proceso de trabajo, lo que tiene un impacto negativo significativo en la eficiencia total y en el coste del proceso.
Además es necesario llevar la pieza hasta la máquina, lo que implica que en el proceso se incurre en tiempos de transición no productivos. Por otro lado para proporcionar flexibilidad a las plantas de producción de forma que se permita modificar la pieza a montar, debido a cambios de diseños de avión, se requiere que los medios de producción sean fácilmente movibles y recolocables en la planta o, mejor aun, no deben ocuparla de forma permanente.
Por consiguiente, considerando el incremento progresivo de los componentes estructurales aeronáuticos que se viene observando en los últimos tiempos, parece evidente que la maquinaria tradicional fija va a ser cada vez menos adecuada debido a que las grandes dimensiones de dichos componentes tienen influencia directa tanto en las prestaciones de la máquina como en el coste del sistema.
Por ello, la invención ha desarrollado un nuevo robot automatizado de taladro que es portátil y tiene dimensiones reducidas. Como consecuencia de esta portabilidad del robot, la pieza puede permanecer en una localización fija y no requiere una fundación específica o permanente para la máquina en la planta de producción.
Además el robot de la invención elimina gran parte de los tiempos de referenciación y ajuste de la máquina al producto, para lo cual proporciona al sistema portátil capacidad de fijación sobre la grada de montaje del mismo. Por otro lado el robot de la invención mejora la productividad, ya que es capaz de realizar autónomamente todo el trabajo sobre el mismo productos sin intervención del operario, de modo que vaya moviéndose por sus propios medios a lo largo de la grada para recorres distintas zonas de trabajo hasta completar toda la extensión del producto.
Además, mediante el robot de la invención, la formación de los operarios es más sencilla, y además tiene una configuración mucho menor que la de las máquinas convencionales, con lo que su coste de partida es mucho menor. La invención también permite ajustarse a diferente conjuntos de gradas y facilita su uso en la planta de producción con lo que los tiempos muertos de este sistema son mucho menores a los de la versión convencional. Todo ello redunda en que la amortización del robot se realice en tiempos mucho menores.
Además en la estructura del robot de la invención, el hecho de que las piezas sean cada vez mayores en longitud no afecta a su estructura y a sus prestaciones, ya que únicamente supone tener que realizar más cantidad de pasos de avance a lo largo del producto para cubrirlo en su totalidad.
Con el fin de incrementar los ratios de producción, la invención permite utilizar un número variable de robots portátiles trabajando en el ensamble de una misma pieza para reducir los tiempos de producción.
Descripción de la invención
Tal y como ya ha sido descrito, el robot portátil de la invención está previsto para realizar la fase de taladro en el proceso de ensamble de componentes aeronáuticos, que mediante utillajes de precisión se fijan en un soporte conocido como grada; y se caracteriza porque comprende una plataforma desplazable para permitir ubicarla próxima a la grada, y en la que se incluye un manipulador ingrávido que soporta un bastidor en el que se incluye una columna que está prevista para soportar un cabezal de taladro desplazable en los tres ejes. Además comprende medios de fijación del bastidor a la grada en al menos una posición requerida en dicha grada, desde la que es gobernado el desplazamiento del cabezal según los tres ejes mediante un control numérico para realizar los taladros previamente establecidos en el control numérico. Por consiguiente esta estructura permite efectuar la fijación del bastidor a la grada y desde este punto se gobierna el funcionamiento del cabezal en los tres ejes con lo que el robot únicamente puede realizar taladros sobre la zona en la que está fijado el bastidor, de forma que éste está referenciado con un pequeño margen de error respecto a la grada lo que permite efectuar todos los taladros con una precisión de posicionamiento dentro de los márgenes establecido por la tolerancia de posicionamiento, por lo que no necesita recalibrarse con respecto al larguero, o reposicionar la herramienta una vez fijado el bastidor sobre la grada de montaje; ya que el control numérico conoce la posición del taladro con respecto a la pieza a taladrar con precisión gracias al montaje preciso de dicha pieza sobre la grada y al anclaje preciso del bastidor sobre dicha grada.
La invención prevé que comprenda una pluralidad de posiciones de fijación del bastidor en la grada, para así poder efectuar la fase de taladrado sobre la totalidad de la pieza aeronáutica, con independencia de la longitud que ésta tenga, y siempre manteniendo los márgenes de tolerancia establecidos al conocerse cada una de las posiciones de la grada en las que se fija el bastidor. Para ello se han previsto medios de reptado del conjunto del bastidor y columna sobre la grada para permitir cambiar su posición en la grada y realizar diferentes taladros desde cada una de las diferentes posiciones en las que se fija el bastidor sobre la grada.
Los medios de reptado incluyen...
Reivindicaciones:
1. Robot portátil, que está previsto para realizar la fase de taladro en el ensamble de componentes aeronáuticos, para lo que se fija, sobre unos soportes conocidos convencionalmente como grada (12); caracterizado porque comprende una plataforma desplazable (1) para ubicarla próxima a la grada (12), y en la que se incluye un manipulador ingrávido (2) que soporta un bastidor (3) que incluye una columna (4) en la que se soporta un cabezal de taladro (7) desplazable en los tres ejes; habiéndose previsto medios de fijación del bastidor (3) a la grada (12) en al menos una posición requerida en dicha grada (12), desde la que es gobernado el desplazamiento del cabezal de taladro (7) según los tres ejes mediante un control numérico para realizar los taladros dentro de los márgenes previamente establecidos en el control numérico.
2. Robot portátil, según reivindicación 1, caracterizado porque se prevén una pluralidad de posiciones de fijación del bastidor (3) en la grada (12); y habiéndose previsto medios de reptado del conjunto de bastidor (3) y columna (4) sobre la grada (12) para cambiar de posición de fijación en la grada (12) y realizar diferentes taladros en cada posición de fijación.
3. Robot portátil, según reivindicación 2, caracterizado porque los medios de reptado comprenden una base (5) de la columna (4) mediante la que se fija la columna (4) en el bastidor (3) con posibilidad de desplazamiento longitudinal, incluyendo la columna (4) medios de fijación a la grada (12), los cuales están desactivados para permitir el desplazamiento longitudinal (eje X) de la columna (4) con el cabezal de taladro (7) sobre el bastidor (3); que tras realizar los taladros se desplaza a un extremo del bastidor (3), se actúan dichos medios de fijación de la columna (4) a la grada (12) fijando la columna (4) a la grada (12), y se desactivan los medios de fijación del bastidor a la grada para realizar el desplazamiento del bastidor (3) hasta la siguiente posición de fijación en la grada (12).
4. Robot portátil, según reivindicación 3, caracterizado porque los medios de fijación del bastidor (3) a la grada están constituidos por bulones (14) y alojamientos hembra (13) cuyo amarre se realiza mediante un circuito servo-neumático gobernado por un PLC (controlador lógico programable).
5. Robot portátil, según reivindicación 4, caracterizado porque los medios de fijación de la columna (4) a la grada (12) comprende ventosas electromagnéticas (10) actuadas por cilindros (8) que posibilitan la separación de los alojamientos hembra (13) respecto de los bulones (14) evitando que al desplazarse el bastidor (3) sobre la grada tropiecen los bulones (14) con el bastidor (3).
6. Robot portátil, según reivindicación 5, caracterizado porque comprende unos carros cruzados (6) en los que se sustenta el cabezal de taladro (7) sobre la columna (4), para permitir el desplazamiento del cabezal de talador (7) en los ejes Y, Z.
7. Robot portátil, según reivindicaciones anteriores, caracterizado porque el manipulador ingrávido (2) es desplazable en cualquier dirección para posicionar los alojamientos hembra (13) frente a los bulones (13).
8. Robot portátil, según reivindicación 1, caracterizado porque la plataforma desplazable (1) se mueve mediante medios de desplazamiento seleccionados entre manuales y automáticos.
9. Robot portátil, según reivindicaciones anteriores, caracterizado porque la plataforma desplazable comprende un armario eléctrico (17) en el que además se incluye el control numérico, un dispositivo de aspiración (15) de las virutas generadas en los taladros, un dispositivo refrigerador (19) del cabezal de taladro (7), y un grupo hidráulico (20) para realizar el cambio de herramienta del cabezal de taladro (7).
Patentes similares o relacionadas:
Máquina y método de procesamiento de superficies herméticas, del 22 de Abril de 2020, de Mitsubishi Hitachi Power Systems, Ltd: Una máquina de procesamiento de superficies herméticas (1; 1A; 1B; 1C) para realizar el corte de una superficie de unión de un miembro hermético en un cuerpo […]
Sistema de oruga de marco pequeño, del 20 de Noviembre de 2019, de THE BOEING COMPANY: Aparato que comprende: un sistema de herramienta configurado para realizar una operación en una ubicación en una estructura […]
Unidad de mecanización con carro móvil, del 7 de Agosto de 2019, de Watch Out SA: Unidad de mecanización que comprende por lo menos un módulo de mecanización , comprendiendo dicho módulo de mecanización […]
Métodos y aparatos para operaciones de fabricación, del 22 de Mayo de 2019, de THE BOEING COMPANY: Un aparato para realizar una operación de fabricación de una pieza de trabajo, comprendiendo el aparato: un conjunto de oruga adaptado […]
Robot oruga y plataforma de soporte, del 15 de Mayo de 2019, de THE BOEING COMPANY: Aparato que comprende un sistema de oruga y un robot oruga, comprendiendo el robot oruga: un primer sistema de movimiento configurado para […]
Equipo de fresado así como procedimiento para llevar a cabo un mecanizado de fresado en el interior de una ranura, del 15 de Mayo de 2019, de SIEMENS AKTIENGESELLSCHAFT: Equipo de fresado con una herramienta de fresado que rota alrededor de un eje de giro de herramienta , presentando el equipo de fresado un cuerpo […]
Herramienta eléctrica, del 25 de Abril de 2019, de POWER BOX AG: Una herramienta eléctrica que incluye una carcasa y una base , dicha carcasa montada para ser móvil con respecto y separarse de la base, dicha […]
Dispositivo y procedimiento para rectificar un segmento de torre de hormigón de una turbina eólica, del 11 de Marzo de 2019, de Wobben Properties GmbH: Dispositivo de rectificado para el rectificado de un borde de segmento superior de un segmento de torre de una torre de hormigón para preparar el segmento de torre […]