RECEPTOR L1/L2 GPS CON LÓGICA PROGRAMABLE.
Procedimiento para la derivación de una amplitud y una fase pseudo-Doppler de una señal L2 a partir de las señales L1 y L2 recibidas en un sistema de posicionamiento global,
incluyendo cada una de dichas señales L1 y L2 una frecuencia portadora modulada separada modulada mediante un código P conocido y un código W desconocido, comprendiendo el procedimiento las etapas de: amplificar y filtrar las señales L1 y L2 recibidas desde una antena, y convertirlas hacia abajo a señales L1 y L2 de frecuencia de vídeo complejo; convertir dichas señales L1 y L2 de frecuencia de vídeo complejo a un formato digital; desmodular las señales L1 y L2 de frecuencia de vídeo digital complejo con una réplica de código P generada localmente para generar señales L1 y L2 complejas desmoduladas; cambiar una fase pseudo-Doppler de dicha señal compleja desmodulada L1 por una fase digital generada localmente que cambia desde un primer valor de fase inicial de forma lineal de acuerdo con un primer valor de frecuencia para generar una señal L1 con compensación Doppler desmodulada; cambiar la fase pseudo-Doppler de dicha señal compleja desmodulada L2 por una fase digital generada localmente que cambia desde un segundo valor inicial linealmente de acuerdo con un segundo valor de frecuencia para generar una señal L2 con compensación Doppler desmodulada; integrar dichas señales L1 y L2 con compensación Doppler desmoduladas en un primer período de tiempo predefinido para generar las señales L1 y L2 preintegradas; ponderar un componente en fase de dicha señal L1 preintegrada con un primer factor de ponderación para generar una señal L1 ponderada en fase; ponderar un componente en fase de dicha señal L2 preintegrada con un segundo factor de ponderación para generar una señal L2 ponderada en fase; añadir dicha señal L1 en fase ponderada a dicha señal L2 en fase ponderada para generar una señal en fase ponderada total; comparar una magnitud de dicha señal en fase ponderada total con un umbral predefinido para generar un indicador de exceso; invertir dicha señal L2 preintegrada mediante un signo de dicha señal en fase ponderada total para generar una señal L2 desencriptada; y integrar dicha señal L2 desencriptada durante un segundo período de tiempo predefinido con la condición de dicho indicador de exceso para producir una señal L2 compleja integrada cuya magnitud es proporcional a la amplitud de salida deseada de la señal L2, y cuya fase, que se añade a dicha segunda fase inicial, es igual a una fase pseudo-Doppler de salida deseada de la señal L
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/022364.
Solicitante: DATAGRID, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1022 NW 2ND STREET GAINESVILLE, FL 32601 ESTADOS UNIDOS DE AMERICA.
Inventor/es: FRIDMAN,ALEXANDER.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Octubre de 2007.
Clasificación Internacional de Patentes:
- G01S19/32 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Funcionamiento multimodo en un único sistema satelital, p. ej. GPS L1/L2.
- G01S19/37 G01S 19/00 […] › Detalles de hardware o de software de la cadena de procesamiento de la señal.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2364099_T3.pdf
Fragmento de la descripción:
Receptor L1/L2 GPS con lógica programable.
Antecedentes
Esta descripción se refiere en general a receptores vía satélite de un sistema de posicionamiento global (GPS) y, más particularmente, a una misma estructura general del mismo y a secciones específicas de procesamiento de señal digital dentro de dichos receptores.
Los satélites GPS transmiten señales de espectro extendido en bandas de frecuencia L1 y L2 a 154fo y 120fo respectivamente, donde fo = 10,23 MHz. Cada una de las señales L1 está modulada por código C/A y código P, que son únicos para cada satélite. Ambos códigos se conocen públicamente. Cada una de las señales L2 es modulada por el código P solamente. Aunque las secuencias de código C/A y código P son conocidas, cada satélite GPS está provisto de la capacidad de modular su código P con una señal secreta generalmente conocida como código W. Este "anti-spoofing" (A/S) permite que el sistema GPS sea utilizado para aplicaciones militares mediante la prevención de señales de interferencia sobre la base de códigos P conocidos que sean interpretados como señales GPS reales. La combinación del código P y del código W se suele denominar como el código Y.
Hay ventajas importantes para obtener acceso a las señales L1 y L2. En primer lugar, la refracción ionosférica puede ser medida y eliminada mediante el coprocesamiento de la pseudodistancia L1 y L2, lo que permite lograr una mayor precisión en aplicaciones independientes. En segundo lugar, para las aplicaciones de encuesta, hay una ventaja significativa con el uso de mediciones de fase portadora de las señales L1 y L2 en los sistemas de diferencia de fase. Las mediciones de la fase portadora L2 complementarias con las de L1 redoblan el número total de observables, y hacen que sea posible organizar los observables llamados de "vía amplia" que mejoran notablemente el rendimiento de la resolución de ambigüedad de fase.
Sin embargo, los sistemas y procedimientos existentes para el manejo de la señal L1 y L2 tienen desventajas. En particular, por ejemplo, las técnicas actuales de recuperación de la fase portadora L2 del código Y se están volviendo obsoletas porque los sistemas GPS evolucionan. Por ejemplo, las estructuras receptoras conocidas no son capaces de explotar las posibilidades del nuevo código L2c más robusto, que estará disponible para usuarios civiles. Las estructuras receptoras conocidas suelen ser difíciles o imposibles de adaptar a nuevas aplicaciones, ya que son implementadas mediante circuitos integrados de aplicaciones específicas (ASICs). Además, estos ASICs pueden ser costosos.
Además, las estructuras receptoras conocidas normalmente consumen energía y otros recursos de alto nivel con el fin de procesar las señales L1 y L2 de una manera aceptable. Ganguly, "Real-time dual frequency software receiver", simposio de posición, localización y navegación, 2004, describe un receptor de navegación en tiempo real basado en software. La patente US 5663733 describe un receptor de sistema de posicionamiento por satélite. La patente 5576715 describe un procedimiento y un aparato para procesamiento digital en un receptor de sistema de posicionamiento global. La patente 6125135 describe un sistema y un procedimiento de demodulación de señales GPS. La patente 5134407 describe un receptor de sistema de posicionamiento global.
El documento EP 0924532 describe la especificación funcional para el diseño de un receptor avanzado GPS y/o GLONASS (AGGR). El AGGR está preferentemente fabricado incluyendo al menos un subsistema implementado como un circuito integrado de aplicación específica (ASIC). La implementación ASIC del AGGR se conoce como el AGGA. La interfaz de extremo frontal del AGGA acepta señales de entrada de frecuencia intermedia (IF) digita- lizada.
El documento EP 0924532 también describe un aparato para el procesamiento de señales de amplio espectro L1 y L2 recibidas de al menos un satélite de un sistema de posicionamiento global, donde cada una de las señales de amplio espectro incluye un soporte de frecuencia única con un código P pseudoaleatorio conocido y un código desconocido modulado en el mismo, que comprende: un generador de réplicas del código P conocido, un primer demodulador conectado al generador desmodular una de las señales recibidas L1 y L2 con una réplica del código P, un segundo demodulador para desmodular la otra de la señales recibidas L1 y L2 con una réplica del código P, un primer integrador para integrar de manera repetitiva y separada, la desmodulada de las señales L1 y L2 durante períodos de tiempo relacionados con el código desconocido, un segundo integrador para integrar de forma repetitiva y separada la otra desmodulada de las señales L1 y L2 durante períodos de tiempo relacionados con el código desconocido, un correlacionador para correlacionar un resultado de la etapa de integración de cada uno de las dos trayectorias de la señal L1 y L2 con la señal integrada de las otras trayectorias de la señal L1 y L2, y un ajustador de fase para el ajuste de las fases de las réplicas de código P generadas localmente en relación con las señales de entrada L1 y L2 con el fin de maximizar la potencia de correlación de las señales L1 y L2, en el que el correlacionador incluye: un comparador para comparar el valor absoluto de las señales L1 y L2 integradas desmoduladas, un combinador para combinar de forma individual los valores de las señales integradas desmoduladas L1 y L2 con un valor unitario que tiene el signo de las señales L1 y L2 desmoduladas integradas que tienen el mayor valor de salida mediante el comparador, y un primer acumulador para acumular individualmente y por separado las salidas del combinador de las señales L1 y L2 desmoduladas, y un segundo acumulador para acumular individualmente y por separado las salidas del combinador para la otro desmodulada de las señales L1 y L2. El combinador puede ser un multiplicador.
En consecuencia, hay una necesidad de un procedimiento de procesamiento y un sistema que mantenga una alta calidad al reducir la complejidad del hardware.
Descripción
La presente invención proporciona un procedimiento según la reivindicación 1. Realizaciones de la presente invención se dirigen a aspectos antes mencionados. Aquí se describe un receptor para el procesamiento de señales L1 y L2, donde el receptor es fácilmente configurable para procesar otros tipos de señales, tales como la señal L2c más robusta. Con este fin, el receptor puede comprender la lógica programable capaz de ser configurada y/o reconfigurada mediante, por ejemplo, un archivo de configuración en forma de datos electrónicos, tales como software o firmware. La lógica programable puede recibir el archivo de configuración de la memoria bajo el control de una unidad de procesamiento central (CPU), por ejemplo durante el encendido del receptor. Como que el receptor es fácilmente reconfigurable a través de los datos electrónicos del archivo de configuración, se evita la rigidez y el coste del ASIC.
Los receptores descritos en este documento pueden implementar un procedimiento eficiente de la presente invención que conserva una alta calidad al tiempo que permite que la complejidad del hardware se reduzca significativamente.
Breve descripción de los dibujos
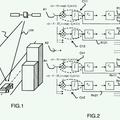
La figura 1 muestra un sistema de un receptor GPS de doble frecuencia;
La figura 2 muestra una aproximación a modo de pieza de la función Ln cosh() de acuerdo con realizaciones de la presente invención;
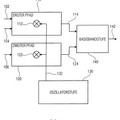
La figura 3 muestra una realización de una configuración de circuito del bloque de extremo frontal RF del sistema de la figura 1;
La figura 4 es un diagrama de bloques de una realización esquemática implementada en el sistema de la figura 1;
La figura 5 muestra detalles de una realización de circuitos de cambio de fase de la figura 4;
La figura 6 muestra detalles de una realización de un circuito de suma ponderada de la figura 4, y
La figura 7 ilustra etapas del proceso controladas mediante una unidad central de procesamiento (CPU) de acuerdo con realizaciones de la presente invención.
Descripción detallada de realizaciones
Tal como se mencionó anteriormente, ya que los sistemas GPS se están desarrollando, las nuevas señales están surgiendo en el rango de frecuencia L2, y nuevas señales están previstas para L1. Los consumidores se beneficiarían de un receptor versátil capaz de procesar señales de varias estructuras.
Se describe en este... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la derivación de una amplitud y una fase pseudo-Doppler de una señal L2 a partir de las señales L1 y L2 recibidas en un sistema de posicionamiento global, incluyendo cada una de dichas señales L1 y L2 una frecuencia portadora modulada separada modulada mediante un código P conocido y un código W desconocido, comprendiendo el procedimiento las etapas de:
amplificar y filtrar las señales L1 y L2 recibidas desde una antena, y convertirlas hacia abajo a señales L1 y L2 de frecuencia de vídeo complejo;
convertir dichas señales L1 y L2 de frecuencia de vídeo complejo a un formato digital;
desmodular las señales L1 y L2 de frecuencia de vídeo digital complejo con una réplica de código P generada localmente para generar señales L1 y L2 complejas desmoduladas;
cambiar una fase pseudo-Doppler de dicha señal compleja desmodulada L1 por una fase digital generada localmente que cambia desde un primer valor de fase inicial de forma lineal de acuerdo con un primer valor de frecuencia para generar una señal L1 con compensación Doppler desmodulada;
cambiar la fase pseudo-Doppler de dicha señal compleja desmodulada L2 por una fase digital generada localmente que cambia desde un segundo valor inicial linealmente de acuerdo con un segundo valor de frecuencia para generar una señal L2 con compensación Doppler desmodulada;
integrar dichas señales L1 y L2 con compensación Doppler desmoduladas en un primer período de tiempo predefinido para generar las señales L1 y L2 preintegradas;
ponderar un componente en fase de dicha señal L1 preintegrada con un primer factor de ponderación para generar una señal L1 ponderada en fase;
ponderar un componente en fase de dicha señal L2 preintegrada con un segundo factor de ponderación para generar una señal L2 ponderada en fase;
añadir dicha señal L1 en fase ponderada a dicha señal L2 en fase ponderada para generar una señal en fase ponderada total;
comparar una magnitud de dicha señal en fase ponderada total con un umbral predefinido para generar un indicador de exceso;
invertir dicha señal L2 preintegrada mediante un signo de dicha señal en fase ponderada total para generar una señal L2 desencriptada; y
integrar dicha señal L2 desencriptada durante un segundo período de tiempo predefinido con la condición de dicho indicador de exceso para producir una señal L2 compleja integrada cuya magnitud es proporcional a la amplitud de salida deseada de la señal L2, y cuya fase, que se añade a dicha segunda fase inicial, es igual a una fase pseudo-Doppler de salida deseada de la señal L2.
2. Procedimiento según la reivindicación 1, que también comprende controlar dicho segundo factor de ponderación de manera que se ajuste a cero durante períodos de tiempo cuando no está disponible una estimación a priori de la fase pseudo-Doppler de la señal L2.
3. Procedimiento según la reivindicación 2, que también comprende:
desmodular la señal L1 de frecuencia de vídeo compleja digital con un réplica de código C/A para generar una segunda señal L1 desmodulada compleja;
cambiar dicha primera fase inicial en 90 grados para generar una tercera fase inicial;
cambiar una fase pseudo-Doppler de dicha segunda señal L1 compleja desmodulada mediante una fase digital generada localmente que cambia desde dicho tercer valor de fase inicial de forma lineal de acuerdo con dicho primer valor de frecuencia para generar una segunda señal L1 con compensación Doppler desmodulada;
integrar dicha segunda señal L1 de compensación Doppler desmodulada durante un tercer período de tiempo predefinido para producir una señal L1 integrada;
proporcionar dicha señal L1 integrada a un filtro de bucle de retroalimentación para generar una estimación de la fase pseudo-Doppler L1 y la frecuencia pseudo-Doppler; y
ajustar dicha primera fase inicial, de acuerdo con dichas estimaciones de fase pseudo-Doppler L1 y frecuencia pseudo-Doppler.
4. Procedimiento según la reivindicación 3, que también comprende:
restar dicha estimación de fase pseudo-Doppler L1 multiplicada por un factor de 60/77 a partir de una suma de dicha fase pseudo-Doppler de salida de la señal L2 y dicha segunda fase inicial para generar una diferencia de fase L1/L2;
suavizar dicha diferencia de fase L1/L2 para generar una diferencia de fase L1/L2 suavizada; y
ajustar dicha segunda fase inicial para ser igual a una suma de dicha estimación de la fase pseudo-Doppler L1 multiplicada por un factor de 60/77 y dicha diferencia de fase L1/L2 suavizada.
5. Procedimiento según la reivindicación 1, en el que la etapa de demodulación se realiza simultáneamente con la etapa de conversión.
Patentes similares o relacionadas:
Método y aparato para conformar un haz remoto, del 4 de Octubre de 2017, de LOCATA CORPORATION PTY LTD: Un dispositivo para conformar un haz desde un sistema de antenas, en un receptor físicamente separado, incluyendo el dispositivo: un sistema […]
Un receptor y transmisor para uso en un sistema de navegación por satélite, del 3 de Mayo de 2017, de EUROPEAN SPACE AGENCY: Un receptor para uso con un sistema de navegación por satélite que comprende una constelación de múltiples satélites en la que cada satélite […]
 Dispositivo espaciotemporal multi-antenas multi-correladores para el rechazo de los multi-trayecto de los sistemas de navegación, del 26 de Octubre de 2016, de THALES: Dispositivo de localización adecuado para discriminar una señal útil de señales multi-trayecto, incluyendo dicho dispositivo al menos dos […]
Dispositivo espaciotemporal multi-antenas multi-correladores para el rechazo de los multi-trayecto de los sistemas de navegación, del 26 de Octubre de 2016, de THALES: Dispositivo de localización adecuado para discriminar una señal útil de señales multi-trayecto, incluyendo dicho dispositivo al menos dos […]
Sistema y procedimiento de determinación de un receptor, y un receptor asociado, del 15 de Abril de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Receptor de un sistema de determinación de al menos una información de posicionamiento de dichoreceptor , comprendiendo el sistema […]
Receptor para señales de posicionamiento por radio, del 31 de Octubre de 2012, de QUALCOMM INCORPORATED: Un dispositivo móvil para determinar una posición del dispositivo móvil usando un procesador gráfico , comprendiendo el dispositivo móvil: medios […]
 Receptor de banda multifrecuencia, del 8 de Mayo de 2012, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Receptor de banda multifrecuencia con las siguientes características:
un primer trayecto , que está configurado para procesar una primera banda […]
Receptor de banda multifrecuencia, del 8 de Mayo de 2012, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Receptor de banda multifrecuencia con las siguientes características:
un primer trayecto , que está configurado para procesar una primera banda […]
Unidad GPS móvil que presenta un estado de potencia reducida, del 30 de Marzo de 2012, de SNAPTRACK INC.: Unidad GPS móvil que presenta un estado de potencia reducida, comprendiendo la unidad GPS móvil: - un receptor para recibir señales GPS procedentes de satélites […]
RECEPTOR PARA SEÑALES DE POSICIONAMIENTO POR RADIO, del 9 de Marzo de 2011, de QUALCOMM INCORPORATED: Un receptor para señales de posicionamiento por radio que comprende una parte de alta frecuencia y unas piezas de procesamiento digital […]