Receptor para señales de posicionamiento por radio.
Un dispositivo móvil para determinar una posición del dispositivo móvil usando un procesador gráfico (21),
comprendiendo el dispositivo móvil:
medios (1, 4) para recibir una señal RF que comprende señales de posicionamiento por radio;
medios (5, 6, 7, 8) para producir señales I/Q ortogonales basadas en la señal RF;
medios para calcular que comprenden dicho procesador gráfico (21) adaptados para calcular una pluralidadde correlaciones a partir de las señales I/Q ortogonales para formar resultados de correlación; y
medios (11, 21) para calcular datos relacionados con la posición basados en los resultados de correlación.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10008675.
Solicitante: QUALCOMM INCORPORATED.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5775 MOREHOUSE DRIVE SAN DIEGO, CA 92121-1714 ESTADOS UNIDOS DE AMERICA.
Inventor/es: YOUNG,PHIL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/37 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Detalles de hardware o de software de la cadena de procesamiento de la señal.
PDF original: ES-2395657_T3.pdf
Fragmento de la descripción:
Receptor para señales de posicionamiento por radio La presente invención se refiere a un receptor para señales de posicionamiento por radio, en particular a un receptor para la adquisición y seguimiento de señales de localización por satélite tales como señales de GNSS (Sistema de Navegación Global por Satélite) , GPS, GLONASS o Galileo. La presente invención también se refiere al software usado en tal receptor.
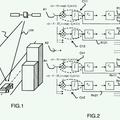
Descripción de la técnica relacionada La Fig. 1 ilustra un ejemplo de un receptor GPS con software conocido. El receptor ilustrado comprende un primer chip 1 para realizar la conversión descendente y digitalización de RF, y un segundo módulo 2, normalmente construido alrededor de un procesador universal o procesador 9 de señales digitales, que ejecuta un programa para llevar a cabo el procedimiento de correlación y seguimiento así como la navegación. Ambos chips están conectados mutuamente por un bus de datos propietario 3. También se han sugerido algunas soluciones que incluyen ambos módulos en un único chip.
En un sistema GNSS las fuentes son Vehículos Espaciales (SV) GNSS orbitales. En el caso de los GPS, siendo fácilmente extensible a otros sistemas de localización por radio, cada vehículo espacial transmite dos señales portadoras de microondas. La señal L1 a 1575.42 MHz porta el mensaje de navegación. La señal L2 a 1227.60 MHz
se usa entre otras cosas para medir el retardo ionosférico. Las señales L1 y/o L2 están moduladas por tres códigos binarios:
• El Código C/A (Adquisición Grosera) modula la fase de la señal portadora L1. El código C/A es un Ruido Seudo Aleatorio (PRN) a 1 MHz que se repite cada 1023 bits (1 milisegundo) . Cada SV usa un código C/A diferente. Este código de tipo ruido dispersa el espectro de la señal modulada por un ancho de banda de 1 MHz para mejorar la inmunidad ante el ruido.
• El mensaje de navegación también modula la señal L1 del código C/A. Es una señal a 50 Hz que consiste en bits de datos que describen las órbitas de los satélites GPS, correcciones horarias y otros parámetros del sistema.
• El Código P (preciso) modula ambas señales L1 y L2, y únicamente puede ser usado por usuarios 25 autorizados con claves criptográficas.
La tarea de un receptor GPS es recuperar las señales recibidas desde los diversos vehículos espaciales que pueden ser observados en un momento dado. Para esto, el circuito de la Fig. 1 comprende una antena 4 cuya señal de salida es amplificada en el primer chip 1 por un amplificador 5 de bajo ruido y subconvertida a una señal de frecuencia intermedia (señal IF) en la unidad de conversión 6, antes de ser enviada a la etapa 7 de supresión de portadora. La señal IF a menudo comprende un componente en fase (i) y un componente en cuadratura (q) , que son convertidos por un conversor analógico/digital 8 a señales digitales (I, Q) enviadas a través de un bus de datos 3 al segundo módulo (“correlacionador”) para un procesamiento adicional.
La función del correlacionador 2 es principalmente la de esparcir las señales I, Q enviadas al chip de RF y originadas en los diversos SV. Para esto, el correlacionador alinea temporalmente las señales entrantes con unas copias, generadas localmente, de las señales de PRN de cada SV existente o probable. Para reducir el cálculo aéreo y el tiempo de adquisición, la alineación a menudo se lleva a cabo en el dominio de la frecuencia, correlacionando una transformación FFT de las señales I, Q entrantes con unas transformaciones FFT de las señales de PRN que caracterizan cada SV. Existen varios algoritmos usados por diferentes fabricantes para llevar a cabo esta correlación en el tiempo o en el dominio de la frecuencia. Sin embargo, se da el hecho de que los procesos de correlación y desdispersión tienden a requerir mucha potencia de procesamiento. Por ejemplo, una correlación en el dominio de frecuencia requiere mucha potencia de procesamiento para el cálculo de las FFT, la multiplicación por los conjugados complejos de los Códigos C/A, y la FFT Inversa para los resultados necesarios para una conversión tiempo-frecuencia rápida.
Además de los requisitos de procesamiento, este proceso también requiere una gran capacidad de almacenaje para los datos y los resultados.
El correlacionador 2 emite datos procesados digitalmente que son enviados a través del bus de datos 3 hasta un procesador 11 de adquisición y navegación para calcular y para representar visualmente los datos relacionados con la posición, incluyendo por ejemplo la posición del receptor. La naturaleza de los datos de salida del correlacionador
depende del receptor; algunos módulos envían en ese momento las coordenadas de posición mientras que otros sólo envían valores intermedios tales como las Seudo Distancias de los SV orbitales.
En la técnica anterior, el correlacionador 2 a menudo está construido alrededor de un procesador 9 de propósito general o un procesador de señales digitales que tiene acceso a su propia memoria 10 de datos e instrucciones. Algunos ejemplos de correlacionadores incluyen los procesadores de banda base NJ1030 y NJ2020, fabricados por
el solicitante.
También se conoce el uso de FPGA (Conjunto Programable de Puertas) o ASIC (Circuito Integrado para Aplicaciones Específicas) a modo de correlacionadores para calcular las FFTs y para las demás computaciones diversas llevadas a cabo por el módulo 2.
Sin embargo, los procesadores, FPGA y ASIC son costosos, y consumen potencia y espacio, por lo tanto, los recursos 2 de hardware requeridos para los procedimientos de correlación y seguimiento tienen un impacto significativo en el precio, volumen y consumo de energía generales del receptor. Adicionalmente estos recursos a menudo se dedican al algoritmo del GPS y no pueden ser usados para otros propósitos cuando ya no son requeridos por la función de GPS.
También se ha sugerido el uso de una CPU 11 de propósito general en el sistema para el cálculo de la FFT requerida para la correlación. Aunque las CPUs de propósito general son rápidas, a menudo el rendimiento total del sistema no es suficientemente rápido. Adicionalmente, esta solución hace un uso poco eficaz del ancho de banda de la memoria disponible y ejerce una elevada carga en la CPU, bloqueándola por lo tanto para otras tareas.
El documento US 6.018.784A divulga una tarjeta de sistema de posicionamiento global (GPS) de interconexión de componentes periféricos (PCI) para recibir una señal de GPS. En una primera realización, la tarjeta PCI que incluye un convertidor descendente. En una segunda realización la tarjeta PCI que incluye el convertidor descendente GPS está integrado en un ordenador personal para correlacionar una señal GPS y calcular una localización GPS. En una tercera realización la tarjeta PCI incluye un convertidor descendente y un correlacionador GPS. En una cuarta realización la tarjeta PCI que incluye el convertidor descendente GPS y el correlacionador GPS está integrada en un ordenador personal para calcular una localización GPS.
Cabe prestar atensión asimismo al documento AKOs et al.. Real-Time GPS Software Receiver” ION NMTM 2001, LONGBEACH, CA, 22 de enero de 2001, XP002424053.
Por lo tanto, uno de los objetivos de la presente invención es proporcionar la potencia de procesamiento digital requerida por un receptor de señales de posicionamiento por radio de manera menos costosa, con un menor consumo de energía y de espacio que en la técnica anterior, y de una manera que comparta los recursos de manera eficaz para que también puedan ser usados para otras funciones del sistema cuando las funciones de navegación no los requieran.
Breve resumen de la invención De acuerdo con la invención, estos objetivos son logrados por medio del objeto de las reivindicaciones independientes. Algunas características opcionales son el objeto de las reivindicaciones dependientes.
En particular, estos objetivos se logran por medio de un receptor de señales de posicionamiento por radio que comprende partes de procesamiento de señales digitales como parte de una tarjeta gráfica o de sonido para calcular datos relacionados con la posición basados en las señales de radio recibidas desde una pluralidad de vehículos espaciales.
En el contexto de la presente solicitud, los “datos relacionados con la posición” no están limitados a la posición en sí misma, sino que también abarcan cualquier dato derivado de la posición, incluyendo la velocidad, aceleración, altitud, etc, así como cualquier dato o valor intermedio usado para el cálculo de la posición a partir de las señales de posicionamiento por radio recibidas por el... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo móvil para determinar una posición del dispositivo móvil usando un procesador gráfico (21) , comprendiendo el dispositivo móvil:
medios (1, 4) para recibir una señal RF que comprende señales de posicionamiento por radio; medios (5, 6, 7, 8) para producir señales I/Q ortogonales basadas en la señal RF; medios para calcular que comprenden dicho procesador gráfico (21) adaptados para calcular una pluralidad de correlaciones a partir de las señales I/Q ortogonales para formar resultados de correlación; y medios (11, 21) para calcular datos relacionados con la posición basados en los resultados de correlación.
2. El dispositivo móvil de la reivindicación 1,
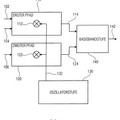
en el dichos medios de recepción comprenden un módulo de radiofrecuencia, RF, (1) , y en el que dichos medios para calcular comprenden una unidad de procesamiento gráfico (20) , comprendiendo dicha unidad de procesamiento gráfico dicho procesador (21) , una memoria (22, 23) acoplada al procesador (21) , comprendiendo dicha memoria software gráfico y estando acoplada al módulo RF para recibir las señales de posicionamiento por radio; en el que dicha memoria comprende, además software para llevar a cabo un procesamiento de señales de posicionamiento por radio, al menos en parte, en la unidad de procesamiento gráfico (20) , basado en datos proporcionados por el módulo RF (1) ; y software para determinar la posición del dispositivo móvil.
3. El dispositivo móvil de la reivindicación 2, en el que las señales de posicionamiento por radio comprenden señales procedentes de una pluralidad de vehículos espaciales o de un sistema de posicionamiento terrestre.
4. El dispositivo móvil de la reivindicación 2, que comprende, además, un procesador principal (11) separado de la unidad de procesamiento gráfico (20) y acoplado a la misma.
5. Un procedimiento para determinar una posición de un dispositivo móvil usando un procesador gráfico (21) , comprendiendo el procedimiento:
recibir, en un módulo de radiofrecuencia, RF, (1) , una señal RF que comprende señales de posicionamiento por radio; producir señales I/Q ortogonales basadas en la señal RF; calcular usando dicho procesador gráfico (21) , una pluralidad de correlaciones a partir de las señales I/Q ortogonales para formar resultados de correlación; y calcular datos relacionados con la posición basados en los resultados de correlación.
6. El procedimiento de la reivindicación 5, en el que producir las señales I/Q ortogonales comprende producir las señales I/Q ortogonales en el módulo RF (1) o en el procesador gráfico (21) .
7. El procedimiento de la reivindicación 5, en el que calcular la pluralidad de correlaciones comprende correlacionar las señales I/Q ortogonales con una copia local de una pluralidad de señales de Ruido Pseudoaleatorio, PRN, de una pluralidad correspondiente de vehículos espaciales, SV.
8. El procedimiento de la reivindicación 5, en el que calcular los datos relacionados con la posición comprende calcular los datos relacionados con la posición en el procesador gráfico (21) .
9. El procedimiento de la reivindicación 5, en el que producir las señales I/Q ortogonales comprende:
producir una señal de frecuencia intermedia, IF, basada en las señales RF; y producir las señales I/Q ortogonales basadas en la señal IF.
10. El procedimiento de la reivindicación 5, que comprende, además, reducir el procesamiento gráfico de los datos gráficos como resultado de calcular la pluralidad de correlaciones o impedir el procesamiento gráfico de datos gráficos como resultado del calcular la pluralidad de correlaciones.
11. El procedimiento de la reivindicación 5, que comprende, además, determinar un pico de correlación en un histograma que indica un desfase temporal relativo de una señal de satélite.
12. El procedimiento de la reivindicación 5, que comprende, además, generar en el procesador gráfico (21) una copia local de una señal de Ruido Pseudoaleatorio, PRN para cada uno de una pluralidad de vehículos espaciales, SV.
13. El procedimiento de la reivindicación 5, que comprende, además, recuperar, por un procesador principal (11) información de asistencia a partir de un servidor de asistencia externa (14) .
14. El procedimiento de la reivindicación 5, que comprende, además, controlar el procesador gráfico (21) mediante un procesador principal (11) .
15. Un medio legible por ordenador que comprende código de programa almacenado en el mismo para que un dispositivo móvil determine una posición del dispositivo móvil usando un procesador gráfico (21) , incluyendo el código de programa código de programa para:
recibir, en un módulo de radiofrecuencia, RF, una señal RF que comprende señales de posicionamiento por radio; producir señales I/Q ortogonales basadas en la señal RF; calcular, usando dicho procesador gráfico (21) , una pluralidad de correlaciones a partir de las señales I/Q ortogonales para formar resultados de correlación; y
calcular datos relacionados con la posición basados en los resultados de correlación.
Patentes similares o relacionadas:
Método y aparato para conformar un haz remoto, del 4 de Octubre de 2017, de LOCATA CORPORATION PTY LTD: Un dispositivo para conformar un haz desde un sistema de antenas, en un receptor físicamente separado, incluyendo el dispositivo: un sistema […]
Un receptor y transmisor para uso en un sistema de navegación por satélite, del 3 de Mayo de 2017, de EUROPEAN SPACE AGENCY: Un receptor para uso con un sistema de navegación por satélite que comprende una constelación de múltiples satélites en la que cada satélite […]
 Dispositivo espaciotemporal multi-antenas multi-correladores para el rechazo de los multi-trayecto de los sistemas de navegación, del 26 de Octubre de 2016, de THALES: Dispositivo de localización adecuado para discriminar una señal útil de señales multi-trayecto, incluyendo dicho dispositivo al menos dos […]
Dispositivo espaciotemporal multi-antenas multi-correladores para el rechazo de los multi-trayecto de los sistemas de navegación, del 26 de Octubre de 2016, de THALES: Dispositivo de localización adecuado para discriminar una señal útil de señales multi-trayecto, incluyendo dicho dispositivo al menos dos […]
Sistema y procedimiento de determinación de un receptor, y un receptor asociado, del 15 de Abril de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Receptor de un sistema de determinación de al menos una información de posicionamiento de dichoreceptor , comprendiendo el sistema […]
 Receptor de banda multifrecuencia, del 8 de Mayo de 2012, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Receptor de banda multifrecuencia con las siguientes características:
un primer trayecto , que está configurado para procesar una primera banda […]
Receptor de banda multifrecuencia, del 8 de Mayo de 2012, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Receptor de banda multifrecuencia con las siguientes características:
un primer trayecto , que está configurado para procesar una primera banda […]
Unidad GPS móvil que presenta un estado de potencia reducida, del 30 de Marzo de 2012, de SNAPTRACK INC.: Unidad GPS móvil que presenta un estado de potencia reducida, comprendiendo la unidad GPS móvil: - un receptor para recibir señales GPS procedentes de satélites […]
RECEPTOR L1/L2 GPS CON LÓGICA PROGRAMABLE, del 24 de Agosto de 2011, de DATAGRID, INC: Procedimiento para la derivación de una amplitud y una fase pseudo-Doppler de una señal L2 a partir de las señales L1 y L2 recibidas en un sistema […]
RECEPTOR PARA SEÑALES DE POSICIONAMIENTO POR RADIO, del 9 de Marzo de 2011, de QUALCOMM INCORPORATED: Un receptor para señales de posicionamiento por radio que comprende una parte de alta frecuencia y unas piezas de procesamiento digital […]