PROCEDIMIENTO PARA LA REGULACIÓN DE LA FUERZA DE CONTACTO ENTRE UN PANTÓGRAFO Y UN CABLE AÉREO.
Procedimiento para la regulación de la fuerza de contacto entre un pantógrafo y un cable aéreo empleando al menos dos sensores de medición de la fuerza de contacto que calculan la fuerza de contacto,
caracterizado porque a partir de las señales de medición de la fuerza de contacto (y1, y2) se detecta el fallo de un sensor de medición de la fuerza de contacto
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2001/001714.
B60L5/28TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60VEHICULOS EN GENERAL. › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 5/00 Colectores de corriente para líneas de alimentación de energía sobre los vehículos propulsados eléctricamente. › Dispositivos para elevar y colocar en posición el colector.
Clasificación PCT:
B60L5/28B60L 5/00 […] › Dispositivos para elevar y colocar en posición el colector.
Clasificación antigua:
B60L5/28B60L 5/00 […] › Dispositivos para elevar y colocar en posición el colector.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
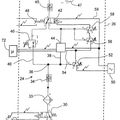
Procedimiento para la regulación de la fuerza de contacto entre un pantógrafo y un cable aéreo. La invención se refiere a un procedimiento para la regulación de la fuerza de contacto entre un pantógrafo y un cable aéreo de acuerdo con la reivindicación 1. Se conocen, en general, instalaciones / procedimientos para la medición de la fuerza de presión de apriete o bien fuerza de contacto por medio de un sensor de medición de la fuerza de contacto (medición de la fuerza de contacto) e instalaciones / procedimientos para la regulación de la fuerza de contacto entre el pantógrafo y el cable aéreo / línea aérea de una instalación de carriles (regulación de la fuerza de contacto). En este caso, durante la medición y regulación de la fuerza de contacto no se aborda el problema de un fallo de un sensor de medición de la fuerza de contacto, aunque la seguridad contra fallo tiene una gran importancia durante la regulación de la fuerza de contacto entre el pantógrafo y la línea aérea, puesto que un fallo de un sensor de medición de la fuerza de contacto tiene, como consecuencia de la fuerza de contacto derivada de las señales de medición de la fuerza de contacto repercusiones / reacciones considerables sobre la fuerza de presión de apriete ajustada y sobre la regulación de la fuerza de contacto entre el pantógrafo y el cable aéreo. Un fallo de un sensor de medición de la fuerza de contacto puede conducir a que se inviertan las ventajas de la regulación de la fuerza de contacto, es decir, que una regulación de la fuerza de contacto en un sensor de medición de la fuerza de contacto averiado conduce, en comparación con el caso no regulado, a un empeoramiento del comportamiento de la fuerza de contacto. El documento DE4334716 A1 publica un procedimiento para la regulación de la fuerza de contacto entre un pantógrafo y un cable aéreo empleando al menos dos sensores de medición de la fuerza de contacto que calculan la fuerza de contacto. La invención tiene el cometido de indicar un procedimiento mejorado para la regulación de la fuerza de contacto entre un pantógrafo y un cable aéreo. Este cometido se soluciona en conexión con las características del preámbulo de acuerdo con la invención por medio de las características indicadas en la reivindicación 1. Las ventajas que se pueden conseguir con la invención consisten especialmente en que el procedimiento propuesto para la regulación de la fuerza de contacto entre un pantógrafo y un cable aéreo eleva en una medida considerable la seguridad y la calidad de una medición de la fuerza de contacto y de la regulación de la fuerza de contacto. Las particularidades de la formación de la señal de medición se aprovechan para la determinación de una medida de la fuerza actual de contacto, para poder realizar de esta manera una declaración sobre el tipo de función / avería de un sensor de medición de la fuerza de contacto y se crea por decirlo así un observador que verifica el sistema de medición para determinar un fallo de un sensor de medición de la fuerza de contacto. A través de la detección de un fallo de un sensor de medición de la fuerza de contacto se puede intervenir de manera selectiva en la medición para evitar de esta manera repercusiones negativas sobre la regulación de la fuerza de contacto. No es necesario de manera ventajosa un empleo de sensores de medición de la fuerza de contacto redundantes. El gasto técnico de cálculo necesario no es demasiado alto y se puede realizar de manera sencilla. Las configuraciones ventajosas de la invención se caracterizan en las reivindicaciones dependientes. Otras ventajas del procedimiento propuesto para la regulación de la fuerza de contacto entre un pantógrafo y un cable aéreo resultan a partir de la descripción siguiente. A continuación se explica en detalle la invención con la ayuda de los ejemplos de realización representados en el dibujo. En este caso: La figura 1 muestra las curvas de tiempo de las dos señales de medición de la fuerza de contacto así como de la señal de medición media de la fuerza de contacto para relaciones ideales. La figura 2 muestra las curvas de tiempo de las dos señales de medición de la fuerza de contacto así como de los valores medios de las señales de medición de la fuerza de contacto para relaciones reales. La figura 3 muestra derivaciones cuadráticas medias para señales de medición reales medidas de la fuerza de contacto. La figura 4 muestra una confrontación de la derivación cuadrática media y de la derivación media del valor absoluto. La figura 5 muestra el mismo hecho que la figura 4 con un sensor de medición de la fuerza de contacto averiado que suministra constantemente el valor 0. La figura 6 muestra el mismo hecho que la figura 4 con un sensor de medición de la fuerza de contacto averiado que 2 suministra constantemente el valor máximo. La figura 7 muestra el mismo hecho que la figura 4 con un sensor de medición de la fuerza de contacto averiado que suministra constantemente un ruido blanco libre / afectado por el valor medio. En general, se conoce detectar las fuerzas de contacto provocadas entre el lado derecho del balancín del pantógrafo y el cable aéreo así como las fuerzas de contacto provocadas entre el lado izquierdo del pantógrafo y el cable aéreo por medio de sensores de medición de la fuerza de contacto separados. En virtud de esta disposición constructiva de los sensores de medición de la fuerza de contacto en el balancín del pantógrafo y el desarrollo en zigzag de la línea aérea se puede indicar a través del promedio de las desviaciones de los muelles de toma de corriente una medida de la fuerza de contacto. La señal de medición de la fuerza de contacto y del primer sensor de medición de la fuerza de contacto (por ejemplo, el derecho) es y1 = X ± x1 La señal de medición de la fuerza de contacto y2 del segundo sensor de medición de la fuerza de contacto (por ejemplo, el izquierdo) es y2 = X ± x2 La señal de medición de la fuerza de contacto ys promediada a partir de y1, y2 es entonces: ys = (y1 + y2)/2 Las dos señales de medición de la fuerza de contacto y1, y2, en general también yi (con i = 1, 2) resultan como superposición aditiva de la porción estacionaria X como consecuencia de la tensión previa de la toma de corriente y de la porción dinámica x1, x2 como consecuencia del desarrollo en zigzag de la línea del cable aéreo. En las figuras 1 y 2 se reproducen las curvas de tiempo (t = tiempo) de la señal de medición de la fuerza de contacto y1, de la señal de medición de la fuerza de contacto y2 así como de la señal de medición de la fuerza de contacto ys promediada a partir de y1, y2 para relaciones ideales ver la figura 1- y para relaciones reales ver la figura 2-. En la figura 2 se registran adicionalmente los valores medios de las señales de medición mean(y1), mean(y2), mean(y3). La desviación cuadrática media de la señal de medición en relación con la varianza de la magnitud característica estadística se calcula con: S 2 ys,k = E {(ySk X) 2 } con E{} = valor medio de {} por ejemplo, E{} = 1/n ysi k i=k n +1 como valor medio flexible sobre los últimos n valores de medición, k = índice sucesivo para el valor medio actual en el instante t=k*T, k = 1, 2, con T = anchura de la etapa de medición. El empleo de la ley de formación para ys en el instante de medición k proporciona: S 2 ys,k = E {(y1k + y2k) 2 } = E{(0) 2 } S 2 ys,k = 0 para el caso de que las señales individuales x1k, x2k estén reflejadas en la porción estacionaria X, x1k = -x2k. Independientemente de si la desviación del muele u otra señal, por ejemplo obtenida a través de medición directa de la fuerza de contacto, se utiliza o no para la formación de la señal de medición de la fuerza de contacto, esta relación se aplica siempre que las señales individuales utilizadas están reflejadas en la porción estacionaria X. Las asimetrías en y1 e y2 como consecuencia de ajustes erróneos en el registrador de medición se pueden compensar teniendo en cuenta la desviación provocada por la asimetría durante la formación de ys. En la figura 3 se reproducen las particularidades para señales de medición de la fuerza de contacto reales medidas. En este caso, se representan las desviaciones cuadráticas medias cov(y1), cov(y2) de las señales individuales y la 3 desviación cuadrática media cov(ys) de la señal media. La porción dinámica xi se puede compensar en este caso con la varianza S 2 ys. El error S 2 ys = 0 se puede atribuir a interferencias estocásticas constructivas no detectables y resultantes de ello. Estas interferencias se pueden tener en cuenta a través de un término ei aditivo, estocástico (aleatorio): yi = X + xi + ei, con i = 1, 2 En caso de fallo de un sensor de medición de la fuerza de contacto se incumple la condición S 2 ys = 0 sin término... [Seguir leyendo]
Reivindicaciones:
1.- Procedimiento para la regulación de la fuerza de contacto entre un pantógrafo y un cable aéreo empleando al menos dos sensores de medición de la fuerza de contacto que calculan la fuerza de contacto, caracterizado porque a partir de las señales de medición de la fuerza de contacto (y1, y2) se detecta el fallo de un sensor de medición de la fuerza de contacto. 2.- Procedimiento de acuerdo con la reivindicación 1, caracterizado porque se comparan la derivación cuadrática media actual (S 2 ys o bien cov(ys)), formada a partir de las señales de medición (y1, y2), con la derivación cuadrática media en el caso nominal no averiado (S 2 ys o bien cov(ys)0 y se emplea para la detección del fallo de un sensor de medición de la fuerza de contacto. 3.- Procedimiento de acuerdo con la reivindicación 1, caracterizado porque el valor medio actual de la derivación (PT1 (|ys-X|2,5s)), formado a partir de las señales de medición (y1, y2) se compara con el valor medio de la derivación en el caso nominal no perturbado (PT1 (|ys-X|2,5s)0) y se utiliza para la detección del fallo de un sensor de medición de la fuerza de contacto. 4.- Procedimiento de acuerdo con la reivindicación 2 ó 3, caracterizado porque la previsión del valor teórico del algoritmo de regulación empleado para la regulación de la fuerza de contacto se utiliza como valor medio o bien porción de señal estacionaria. 5.- Procedimiento de acuerdo con la reivindicación 1, caracterizado porque la detección del fallo de un sensor de medición de la fuerza de contacto se realiza por medio de un análisis espectral de las señales de medición de la fuerza de contacto (y1, y2), con el que se verifica con la ayuda de la frecuencia de zigzag del cable aéreo detectada el modo de funcionamiento de los sensores de medición de la fuerza de contacto. 6.- Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque se realiza una declaración sobre cuál de los dos sensores de medición de la fuerza de contacto está averiado a través de la evaluación de momentos más elevados, en particular la inclinación. 6 7 8 9
Patentes similares o relacionadas:
DISPOSITIVO PARA REGISTRAR LA FUERZA DE PRESION ENTRE UN HILO DE CONTACTO Y UN PANTOGRAFO., del 1 de Noviembre de 2003, de DAIMLERCHRYSLER RAIL SYSTEMS GMBH: Dispositivo para registrar la fuerza de presión entre un hilo de contacto y un pantógrafo de un vehículo alimentado eléctricamente con un dispositivo de medición para […]
COLECTOR DE CORRIENTE., del , de ABB DAIMLER-BENZ TRANSPORTATION (TECHNOLOGY) GMBH: LA INVENCION SE REFIERE A UNA TOMA DE CORRIENTE CON UN CONTACTO DESLIZANTE PARA TRANSMITIR LA ENERGIA ELECTRICA DESDE UNA LINEA SUPERIOR HASTA UN VEHICULO […]
DISPOSITIVO DE CONTROL ELECTRO-FLUIDICO Y METODO PARA CONTROLAR UN COLECTOR DE CORRIENTE ELECTRICA, del 1 de Abril de 2009, de INNOVENE MANUFACTURING BELGIUM NV: Un dispositivo de control para controlar una presión entregada a un accionador accionado por fluido para accionar un conjunto de colector de corriente […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 DISPOSITIVO DE CONTROL ELECTRO-FLUIDICO Y METODO PARA CONTROLAR UN COLECTOR DE CORRIENTE ELECTRICA, del 1 de Abril de 2009, de INNOVENE MANUFACTURING BELGIUM NV: Un dispositivo de control para controlar una presión entregada a un accionador accionado por fluido para accionar un conjunto de colector de corriente […]
DISPOSITIVO DE CONTROL ELECTRO-FLUIDICO Y METODO PARA CONTROLAR UN COLECTOR DE CORRIENTE ELECTRICA, del 1 de Abril de 2009, de INNOVENE MANUFACTURING BELGIUM NV: Un dispositivo de control para controlar una presión entregada a un accionador accionado por fluido para accionar un conjunto de colector de corriente […]