PROCEDIMIENTO PARA LA ACTIVACIÓN DE UN DISPOSITIVO TENSOR Y SISTEMA TENSOR PARA LA REALIZACIÓN DEL PROCEDIMIENTO.
Procedimiento para la activación de un dispositivo tensor (3) para tensar una herramienta o pieza de trabajo por medio de un accionamiento eléctrico (2),
en el que están integradas instalaciones para la medición de corrientes del motor y de posiciones del motor para el control de procesos de tensado realizados con el dispositivo tensor (3), caracterizado por las siguientes etapas: - medición de las corrientes del motor y medición adicional de las posiciones del motor; - evaluación de las corrientes del motor como medida de fuerzas de tensado así como de las posiciones del motor como medida de una posición actual del dispositivo tensor; - determinación de una curva de las fuerzas de tensado dependiente del recorrido como función de las fuerzas de tensado de la posición actual del dispositivo tensor; y - derivación de magnitudes características del proceso de tensado a partir de la curva de las fuerzas de tensado dependiente del recorrido
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/004917.
Solicitante: ROHM GMBH.
Nacionalidad solicitante: Alemania.
Dirección: HEINRICH-RÖHM-STRASSE 50 89567 SONTHEIM/BRENZ ALEMANIA.
Inventor/es: VETTER,THOMAS, SPEER,Rolf.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Junio de 2008.
Clasificación Internacional de Patentes:
- B23Q17/00C4
Clasificación PCT:
- B23Q17/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2360056_T3.pdf

Fragmento de la descripción:
La invención se refiere a un procedimiento para la activación de un dispositivo tensor así como a un sistema tensor para la realización del procedimiento, de acuerdo con el preámbulo de las reivindicaciones 1 y 15, respectivamente (ver, por ejemplo, el documento US 2003/0014860).
Los sistemas tensores con dispositivos tensores se emplean en diferentes configuraciones para tensar herramientas, como por ejemplo brocas o fresas. Los dispositivos tensores, que sirven para tensar una herramienta en un porta-herramientas, están constituidos típicamente por una pinza tensora o un conjunto tensor de elementos tensores, que están dispuestos distribuidos sobre la periferia del porta-herramientas. Además, los dispositivos tensores del tipo en cuestión sirven para tensar piezas de trabajo.
Los dispositivos tensores se abren o se cierran habitualmente por medio de elementos mecánicos de ajuste. Por ejemplo, en dispositivos tensores en forma de pinzas tensoras, éstos se alojan habitualmente en un soporte de fijación de pinzas móvil axialmente y se pueden activar entonces a través de una barra tensora en forma de cuña desplazable axialmente, es decir, que se puede mover. Las fuerzas de sujeción necesarias para tensar la herramienta son aplicadas en este caso por paquetes de muelles, que presionan la barra tensora en forma de cuña contra las pinzas tensoras. La liberación de la herramienta fuera del dispositivo tensor se realiza entonces hidráulicamente, desplazando hacia atrás las pinzas tensoras por medio de una unidad hidráulica en contra de las fuerzas de resorte de los paquetes de muelles.
En el documento DE 101 01 096 A1 se describe un procedimiento para la activación de un dispositivo tensor para herramientas, que está previsto en un husillo que puede ser accionado de forma giratoria. En este procedimiento, se regula la fuerza tensora axial ejercida a través de la barra de activación y que actúa sobre una herramienta empotrada en el husillo, con preferencia también durante el funcionamiento y la rotación del husillo, de manera que se ajusta y se regula la magnitud de la fuerza tensora con relación a la herramienta.
La barra de activación es accionada por medio de un motor eléctrico. Los valores reales para la regulación son generados por un sensor dispuesto entre el husillo y la herramienta, que mide las fuerzas que aparecen allí.
La invención tiene el problema de configurar un procedimiento para la activación de un dispositivo tensor así como un sistema tensor, de tal forma que con un gasto de diseño reducido, se consigue una alta funcionalidad durante la realización de dispositivos tensores.
Para la solución de este problema están previstas las características de las reivindicaciones 1 y 15. Las formas de realización ventajosas y los desarrollos convenientes de la invención se describen en las reivindicaciones dependientes.
El procedimiento de acuerdo con la invención sirve para la activación de un dispositivo tensor para tensar una herramienta o una pieza de trabajo. La herramienta comprende un accionamiento eléctrico, en el que están integradas instalaciones para la medición de corrientes del motor y de posiciones del motor para el control de procesos tensores realizados con el dispositivo tensor. Además, está previsto un sistema de sujeción para la realización del procedimiento.
En el caso de piezas de trabajo complejas, se pueden emplear especialmente también sistemas de sujeción múltiples, es decir, varios sistemas de sujeción de acuerdo con la presente invención. El sistema de sujeción de acuerdo con la invención se puede emplear en este caso, en general, para tensar piezas de trabajo estacionarias o móviles, en particular giratorias. Los dispositivos tensores para tensar piezas de trabajo pueden presentar, en general, herramientas tensoras simétricas rotativas, cuyos diámetros se pueden variar a través de modificaciones cónicas. Además, como herramientas tensoras se pueden emplear también pinzas tensoras o similares.
Una ventaja esencial del procedimiento de acuerdo con la invención o bien del sistema de sujeción de acuerdo con la invención consiste en que las fuerzas de sujeción necesarias para tensar la herramienta o la pieza de trabajo se pueden aplicar simplemente a través del accionamiento eléctrico, de manera que se pueden suprimir sistemas mecánicos, como paquetes de muelles para cerrar el dispositivo tensor así como instalaciones hidráulicas para la apertura de los dispositivos tensores.
Para garantizar la seguridad funcional necesaria del dispositivo tensor, es útil en tales sistemas de sujeción eléctricos determinar las fuerzas de sujeción durante la realización de los procesos tensores. En el sistema de sujeción de acuerdo con la invención, esto se soluciona de manera sencilla en cuanto al diseño porque por medio de instalaciones de medición integradas dentro del accionamiento eléctrico se pueden determinar tanto las corrientes del motor como también las posiciones del motor.
Las corrientes medidas del motor proporcionan una medida de las fuerzas de sujeción producidas. A través de la medición adicional de las posiciones del motor se posibilita una medición de la fuerza tensora de resolución local y, en concreto, sin la utilización de sensores externos costosos, puesto que las instalaciones de medición están integradas en el accionamiento propiamente dicho.
Con la ayuda de estas magnitudes de medición es posible un control exacto y amplio de los procesos tensores realizados con el dispositivo tensor.
En general, las mediciones se pueden realizar durante el proceso tensor propiamente dicho, de manera que no existe ninguna necesidad de tiempo adicional para las mediciones. De manera alternativa, las mediciones se pueden realizar en un proceso de medición separado del proceso tensor. En este caso, el dispositivo tensor durante el proceso de medición se mueve más lentamente que durante el proceso tensor para elevar la exactitud de la medición. De manera especialmente ventajosa, existe para el usuario del sistema de sujeción la posibilidad opcional de si quiere o no integrar el proceso de medición en el proceso tensor.
De acuerdo con un primer aspecto de la invención, las corrientes medidas del motor y las posiciones del motor se utilizan para la regulación del accionamiento eléctrico, para controlar de esta manera activamente los procesos tensores a realizar. Para este control es esencial que las corrientes medidas del motor sean una medida para las fuerzas de sujeción actuales, cuyo conocimiento es decisivo para la realización de movimientos controlados de cierre y apertura de los dispositivos tensores. El cálculo de la fuerza tensora se realiza con la ayuda de las corrientes medidas del motor por medio de un modelo físico, en el que entran las variables de influencia físicas relevantes como fricción, elasticidades y relaciones cinemáticas. La medición adicional de las posiciones del motor proporciona, además, una medida de la posición actual del dispositivo tensor, de manera que para la regulación del accionamiento eléctrico existe una información de resolución local sobre las fuerzas de sujeción actuales.
En una forma de realización especialmente ventajosa de la invención, la regulación del accionamiento eléctrico se realiza de tal forma que durante la colocación del dispositivo tensor en la herramienta y de manera correspondiente durante la retirada del dispositivo tensor fuera de la herramienta, se realiza una regulación de la posición del accionamiento. De manera ventajosa, pero no obligatoria, en un punto determinado del proceso tensor se realiza una conmutación a una regulación de la fuerza o regulación de par, es decir, una regulación del accionamiento eléctrico en función de las corrientes medidas del motor. En este caso, se realiza una conmutación volante entre la regulación de la posición y la regulación de la fuerza. Esta regulación está adaptada al desarrollo temporal del proceso tensor y conduce de esta manera a una optimización de los procesos tensores a realizar. Lo mismo se aplica de manera correspondiente a la sujeción de piezas de trabajo.
De acuerdo con un segundo aspecto de la invención, con la ayuda de las corrientes medidas del motor y de las posiciones del motor se derivan magnitudes características, con cuya ayuda son posibles manifestaciones sobre la calidad de los procesos tensores realizados. Esto posibilita un control del proceso de tal forma que se pueden subsanar los errores que aparecen durante el proceso tensor, en particular... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la activación de un dispositivo tensor (3) para tensar una herramienta o pieza de trabajo por medio de un accionamiento eléctrico (2), en el que están integradas instalaciones para la medición de corrientes del motor y de posiciones del motor para el control de procesos de tensado realizados con el dispositivo tensor (3), caracterizado por las siguientes etapas:
- medición de las corrientes del motor y medición adicional de las posiciones del motor;
- evaluación de las corrientes del motor como medida de fuerzas de tensado así como de las posiciones del motor como medida de una posición actual del dispositivo tensor;
- determinación de una curva de las fuerzas de tensado dependiente del recorrido como función de las fuerzas de tensado de la posición actual del dispositivo tensor; y
- derivación de magnitudes características del proceso de tensado a partir de la curva de las fuerzas de tensado dependiente del recorrido.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque las mediciones se realizan, respectivamente, durante un proceso de tensado o durante un proceso de medición, en el que el dispositivo tensor se mueve a velocidad reducida con respecto al proceso de tensado.
3. Procedimiento de acuerdo con una de las reivindicaciones 1 ó 2, caracterizado porque a partir de la corriente medida del motor, utilizando un modelo, en el que entran los parámetros de influencia físicos relevantes, se determina la fuerza tensora, con la que el dispositivo tensor (3) tensa la herramienta y/o la fuerza de liberación, que se necesita para la liberación de la herramienta tensada.
4. Procedimiento de acuerdo con una de las reivindicaciones 1 a 3, caracterizado porque se determina la curva de las fuerzas tensoras dependiente del tiempo.
5. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque el recorrido tensor del dispositivo tensor es evaluado como medida de la fuerza tensora respectiva.
6. Procedimiento de acuerdo con una de las reivindicaciones 1 a 5, caracterizado porque el accionamiento eléctrico
(2) es accionado con una regulación.
7. Procedimiento de acuerdo con la reivindicación 6, caracterizado porque durante la aproximación del dispositivo tensor (3) a la herramienta se realiza una regulación de la posición, y porque en un punto determinado del proceso tensor se realiza una conmutación a una regulación de la fuerza o regulación de par.
8. Procedimiento de acuerdo con la reivindicación 7, caracterizado porque se realiza una conmutación volante entre la regulación de la posición y la regulación de la fuerza o regulación de par.
9. Procedimiento de acuerdo con una de las reivindicaciones 1 a 8, caracterizado porque como una magnitud característica del proceso tensor se determina el diámetro efectivo de la caña tensora de la herramienta como punto de intersección de las tangentes en dos curvas parciales de la curva dependiente del recorrido de las fuerzas tensoras.
10. Procedimiento de acuerdo con la reivindicación 9, caracterizado porque el diámetro medido de la caña tensora es comparado con un valor teórico.
11. Procedimiento de acuerdo con una de las reivindicaciones 1 a 10, caracterizado porque como una magnitud característica del proceso tensor a través de la evaluación de la curva dependiente del recorrido de las fuerzas tensoras, en particular de un punto de partida de una elevación de las fuerzas tensoras y su gradiente, se determina si la caña tensora presenta defectos o contaminaciones.
12. Procedimiento de acuerdo con una de las reivindicaciones 1 a 11, caracterizado porque como una magnitud característica del proceso tensor se calculan fuerzas de fricción por deslizamiento como magnitud característica para el lubricante o recubrimientos presentes en el accionamiento eléctrico (2) y en el dispositivo tensor (3) a partir de la curva de las fuerzas tensoras dependiente del recorrido.
13. Procedimiento de acuerdo con una de las reivindicaciones 1 a 12, caracterizado porque como una magnitud característica del proceso de tensado se calculan fuerzas de fricción estática como magnitudes características para la auto-retención de la mecánica del dispositivo tensor (3) a partir de la curva de las fuerzas tensoras dependiente del recorrido.
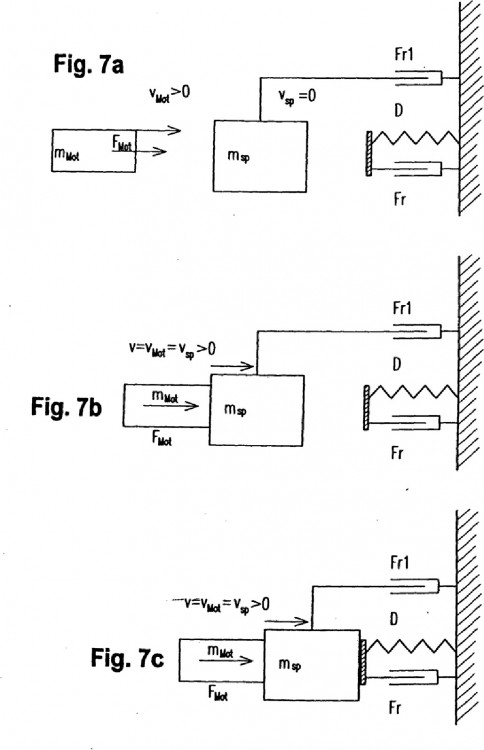
14. Procedimiento de acuerdo con una de las reivindicaciones 1 a 13, caracterizado porque un juego entre un cursor del motor formado por masas móviles del accionamiento (2) y el dispositivo tensor (3) se utiliza para elevar la fuerza tensora a través de la aceleración del rotor del motor sobre el dispositivo tensor (3).
15. Sistema tensor para la activación de un dispositivo tensor (3) para la sujeción de una herramienta o pieza de trabajo por medio de un accionamiento eléctrico (2), en el que están integradas instalaciones de medición para la medición de corrientes del motor y de posiciones del motor, por medio de las cuales se pueden controlar procesos de tensado realizados con el dispositivo tensor (3), caracterizado porque
- a través de las instalaciones de medición se pueden registrar tanto las corrientes del motor como también adicionalmente las posiciones del motor;
- está prevista una unidad de evaluación, por medio de la cual se pueden valuar las corrientes del motor como medida de las fuerzas tensoras y las posiciones del motor como medida de una posición actual del dispositivo tensor, en el que
- se puede calcular una curva de las fuerzas tensoras dependiente del recorrido como función de las fuerzas tensoras de la posición actual del dispositivo tensor; y en el que
- se pueden derivar magnitudes características del proceso de tensado a partir de la curva de las fuerzas tensoras dependiente del recorrido.
16. Sistema tensor de acuerdo con la reivindicación 15, caracterizado porque como magnitudes características del proceso de tensado se pueden calcular un diámetro efectivo de una caña tensora, defectos o contaminaciones de la caña tensora y/o fuerzas de fricción por deslizamiento y/o de fricción estática.
17. Sistema tensor de acuerdo con una de las reivindicaciones 15 ó 16, caracterizado porque el accionamiento eléctrico (2) es un accionamiento lineal.
18. Sistema tensor de acuerdo con la reivindicación 16, caracterizado porque el accionamiento eléctrico (2) es un accionamiento rotatorio (2) con una multiplicación. 19. Sistema tensor de acuerdo con la reivindicación 18, caracterizado porque al accionamiento eléctrico (2) está asociado un husillo roscado como multiplicación.
20. Sistema tensor de acuerdo con una de las reivindicaciones 15 a 19, caracterizado porque simplemente con el accionamiento eléctrico (2) se generan las fuerzas tensoras para el tensado de la herramienta con el dispositivo tensor (3).
21. Sistema tensor de acuerdo con una de las reivindicaciones 15 a 19, caracterizado porque están previstos paquetes de muelles auxiliares, por medio de los cuales se genera una tensión previa adicionalmente a las fuerzas tensoras generadas por medio del accionamiento eléctrico (2).
22. Sistema tensor de acuerdo con una de las reivindicaciones 15 a 21, caracterizado porque en el rotor del motor del accionamiento (2) o del dispositivo tensor (3) está dispuesto un elemento de amortiguación o de resorte.
Patentes similares o relacionadas:
 METODO DE INSTRUCCION DE ENGANCHE, del 6 de Julio de 2010, de MATSUURA MACHINERY CORPORATION: Un método de instrucción de enganche para enganchar la rotación de una mesa que soporta una pieza a trabajar o una paleta sobre la que está montada […]
METODO DE INSTRUCCION DE ENGANCHE, del 6 de Julio de 2010, de MATSUURA MACHINERY CORPORATION: Un método de instrucción de enganche para enganchar la rotación de una mesa que soporta una pieza a trabajar o una paleta sobre la que está montada […]
Unidad de máquina herramienta con control de excentricidad axial y procedimiento de prueba para el estado de sujeción, del 18 de Diciembre de 2019, de Franz Kessler GmbH: Unidad de máquina herramienta motorizada con una unidad de estator y una unidad de rotor giratoria alrededor de un eje de rotación, en donde […]
Procedimiento para monitorizar la concentricidad de una herramienta de una máquina herramienta NC y máquina herramienta NC con control de concentricidad, del 30 de Octubre de 2019, de SCHWABISCHE WERKZEUGMASCHINEN GMBH: Procedimiento para monitorizar la concentricidad de una herramienta de una máquina herramienta NC , que puede rotar alrededor del eje […]
Dispositivo y procedimiento para posicionar un elemento de sujeción, del 23 de Octubre de 2019, de HOMAG GmbH: Dispositivo para posicionar un elemento de sujeción, que está previsto para fijar una pieza de trabajo en una estación de mecanizado, presentando el […]
 Máquina de mecanizado con dispositivo de medición así como procedimiento, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para piezas de trabajo preferiblemente en forma de placa, que están compuestas en particular, al menos parcialmente, de madera, materiales […]
Máquina de mecanizado con dispositivo de medición así como procedimiento, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para piezas de trabajo preferiblemente en forma de placa, que están compuestas en particular, al menos parcialmente, de madera, materiales […]
Dispositivo y procedimiento para trabajo mecánico, del 17 de Julio de 2019, de BISIACH & CARRU'S.P.A.: Cabezal de trabajo para robots industriales, que comprende: - un husillo que comprende una herramienta , estando conectado dicho husillo a un carro […]
Procedimiento y dispositivo para aplicar un fluido sobre una superficie de un componente, del 3 de Abril de 2019, de Drei Bond GmbH: Procedimiento para aplicar un fluido sobre una superficie de un componente , donde el componente se dispone en una pluralidad de alojamientos del componente […]
Dispositivo para la vigilancia de la posición de una herramienta o de un portaherramientas en un husillo de trabajo, del 13 de Junio de 2018, de OTT-JAKOB SPANNTECHNIK GMBH: Dispositivo para la vigilancia de la posición de una herramienta o de un portaherramientas en un husillo de trabajo , en particular en una máquina de mecanización, […]