PROCEDIMIENTO PARA DEPOSITAR PRODUCTOS EN RECIPIENTES.
Procedimiento para depositar productos reales en recipientes reales,
donde productos reales son transportados a lo largo de una línea de recogida (1) y, mediante robots (3,3',3"), son depositados en lugares predeterminados del recipiente real de acuerdo a un controlador, donde previamente tiene lugar una asignación de los productos reales y de los recipientes reales unos con respecto a otros al ser ubicados los símbolos (P*1, P*2,...) representados gráficamente para productos en al menos un símbolo (L) representado gráficamente para un recipiente (B*1, B*2,...) en una pantalla que se encuentra conectada al controlador, caracterizado porque se realiza una selección desde un rango de símbolos diferentes para productos y/o recipientes diferentes, los cuales respectivamente corresponden a productos reales, así como a recipientes reales diferentes
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/069247.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: STIFTER,Christian.
Fecha de Publicación: .
Fecha Solicitud PCT: 4 de Diciembre de 2006.
Clasificación Internacional de Patentes:
- B65B5/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 5/00 Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros. › Introducción sucesiva de objetos, de forma o dimensiones diferentes, en posiciones predeterminadas, p. ej. productos de confitería.
- G05B19/418C1
Clasificación PCT:
- G05B19/418 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359990_T3.pdf

Fragmento de la descripción:
40
45
Estado del arte
La presente invención hace referencia a un procedimiento para depositar productos en recipientes conforme al preámbulo de la reivindicación 1, así como a un controlador para la ejecución del procedimiento conforme al preámbulo de la reivindicación 11.
Es conocido el utilizar líneas de robots para depositar productos en recipientes. De este modo, los productos y los recipientes son transportados en áreas de trabajo de los robots por separado y los productos son depositados por los robots conforme a un controlador en espacios vacíos predeterminados del recipiente. Líneas de recogida semejantes se describen, por ejemplo, en las solicitudes WO 2004/113030, US 6'122'895, US 5'040'056, DE 37'04'423 y CH 693 710. La solicitud WO 2004/018332 describe cómo los productos son reconocidos y seleccionados automáticamente. Las solicitudes WO 03/103903 y US 4'503'507 revelan un controlador común para varios robots.
Para que el robot reconozca, respectivamente, qué producto debe depositar en qué espacio vacío, son necesarios costosos procesos de aprendizaje. Por lo general, estos procesos deben ser realizados por personal que se encuentre capacitado especialmente en la instalación. Si el tipo de empaque debe ser modificado, entonces la instalación debe ser detenida y programada nuevamente.
Por la solicitud US 4,641,271 se conoce un procedimiento de planeamiento del almacenamiento, donde un operario puede determinar una posición de apilamiento deseada para cada una de las diferentes cargas al ser indicado gráficamente el resultado del apilamiento en una pantalla. El espacio no utilizado puede ser reducido de acuerdo a parámetros determinados.
Ventajas de la invención
Por tanto, es objeto de la presente invención crear un procedimiento y un controlador que permitan una nueva configuración sencilla del proceso de empaque.
Este objeto se alcanzará a través de un procedimiento y de un controlador con las características de la reivindicación 1, así como de la reivindicación 11.
En el procedimiento, conforme a la presente invención, productos reales son depositados en recipientes reales, donde éstos son transportados a lo largo de una línea de recogida y, mediante robots, son depositados en lugares predeterminados del recipiente real de acuerdo a un controlador donde, previamente, tiene lugar una asignación de los productos reales y de los recipientes reales, unos con respecto a otros, al ser ubicados los símbolos representados gráficamente para productos en, al menos, un símbolo representado gráficamente para un recipiente en una pantalla que se encuentre conectada al controlador.
Así, el usuario de la línea de recogida, sin costes elevados en cuanto a programación, puede escoger el empaque deseado. Sólo es necesario que el controlador de los robots disponga de una lista o de una biblioteca de símbolos para productos y recipientes que correspondan con los productos y con los recipientes reales, de manera que los robots depositen los productos reales en los recipientes reales, tal como ha sido predeterminado debido al empaque llenado agrupado en la pantalla, así como en la interfaz gráfica de aplicación para el usuario (User Interface).
En una forma de ejecución preferente, los símbolos son desplazados en la pantalla mediante un movimiento "drag and drop" (arrastrar y soltar). No obstante son posibles también otras opciones, a modo de ejemplo mediante comandos desde el teclado.
El procedimiento conforme a la invención y el controlador conforme a la invención se caracterizan por una elevada flexibilidad. Pueden realizarse diferentes combinaciones de recipientes y de productos de forma sencilla y muy rápida, que pueden ser ejecutadas también a través de personal de servicio que posea un conocimiento relativamente profundo de la instalación.
Otras variantes y formas de ejecución ventajosas resultan de las reivindicaciones dependientes.
40
45
Dibujos
En el dibujo se representa un ejemplo de ejecución conforme a la invención y, a continuación, el mismo es explicado en detalle.
Las figuras muestran:
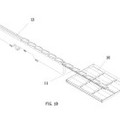
Figura 1: una representación en perspectiva de una línea de recogida de una clase conocida;
Figura 2: un ejemplo de una representación de la pantalla conforme a la invención;
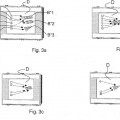
Figuras 3a a 3d: otras representaciones de representaciones de la pantalla conforme a la invención; y
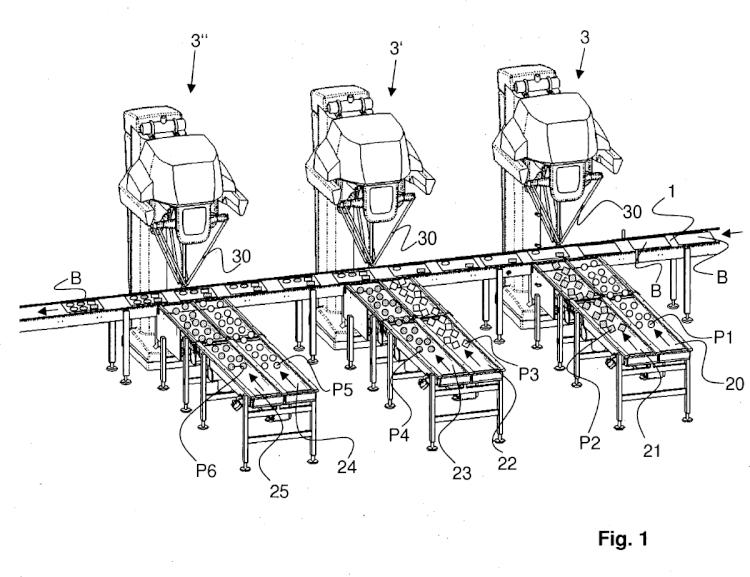
Figura 4: un diagrama de flujo del procedimiento conforme a la invención.
Descripción del ejemplo de ejecución
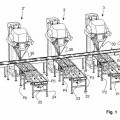
En la figura 1 se representa una línea de pedido de una clase conocida. Un transportador de recipientes 1 se extiende en dirección longitudinal y transporta recipientes reales B delante de varios robots 3, 3', 3". La dirección de transporte se indica mediante dos flechas.
De forma vertical con respecto al transportador de recipientes 1 son conducidos productos reales P1 a P6 en transportadores de productos 20 – 25. De este modo, por cada robot 3, 3', 3" se encuentran presentes dos transportadores de productos 20 – 25 que se extienden de forma paralela uno con respecto a otro, los cuales transportan respectivamente una clase de productos P1 a P6 en el área de trabajo de un robot 3, 3', 3".
Los transportadores de recipientes y de productos 1, 20-25 representados aquí son cintas transportadoras sinfín. Sin embargo, son adecuados también otros sistemas de transporte. Asimismo, puede ser utilizada también otra cantidad de transportadores de recipientes y de productos. Dichos transportadores no deben encontrarse exclusivamente dispuestos de forma vertical unos con respecto a otros, sino que, a modo de ejemplo, pueden extenderse también de forma paralela unos con respecto a otros en el mismo sentido o en sentido inverso.
Asimismo, cada transportador de productos puede suministrar una clase propia de productos. Pero es posible también que varios transportadores de productos transporten la misma clase de productos y que en un transportador se encuentren dispuestas, de forma simultánea, diferentes clases de productos. Además, los productos y los recipientes pueden ser suministrados a los robots en una formación ordenada o desordenada. En particular en el caso de un transporte desordenado, la línea de recogida dispone de una o de varias unidades de identificación de clase conocida, para reconocer la posición y/o el tipo de productos, así como de recipientes.
Los robots 3, 3', 3" representados son robots Delta de clase conocida, los cuales se encuentran provistos de brazos recogedores 30. Robots Delta semejantes, por ejemplo, se describen en la solicitud US 4'976'582. Sin embargo pueden utilizarse también otros robots. Los robots se encuentran interconectados unos a otros mediante un controlador común.
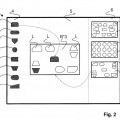
Conforme a la invención, por tanto, los robots depositan los productos por separado en los recipientes de acuerdo a un patrón que ha sido seleccionado previamente en una interfaz gráfica de aplicación D: la figura 2 muestra esta selección o configuración del proceso de empaque. Esta configuración puede efectuarse al encontrarse detenida la instalación. No obstante, puede realizarse también durante el funcionamiento de la instalación.
En la figura 2 se representa una pantalla que se encuentra subdividida en tres áreas. El área del borde izquierda 4 contiene un rango, así como una lista de símbolos P*1 a P*8 para productos, donde dichos símbolos corresponden respectivamente a productos reales. De esta manera, cada símbolo corresponde a una clase de productos. Aquí se representan ocho clases diferentes. El área del borde derecha 6 contiene una lista de símbolos B*1 a B*3 para recipientes diferentes, tres en este caso. Estos símbolos, respectivamente, corresponden también a recipientes reales. Los símbolos de los lugares correspondientes o espacios vacíos de los símbolos de los recipientes se indican mediante L.
Estos símbolos de los productos y de los recipientes provienen de bibliotecas del programa de computación del controlador de robots. Por lo general, las bibliotecas son rellenadas durante la colocación de la instalación de forma específica de acuerdo al cliente. Las bibliotecas pueden ser completadas también en cualquier momento con nuevos productos y recipientes, así como... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para depositar productos reales en recipientes reales, donde productos reales son transportados a lo largo de una línea de recogida (1) y, mediante robots (3,3',3"), son depositados en lugares predeterminados del recipiente real de acuerdo a un controlador, donde previamente tiene lugar una asignación de los productos reales y de los recipientes reales unos con respecto a otros al ser ubicados los símbolos (P*1, P*2,...) representados gráficamente para productos en al menos un símbolo (L) representado gráficamente para un recipiente (B*1, B*2,...) en una pantalla que se encuentra conectada al controlador, caracterizado porque se realiza una selección desde un rango de símbolos diferentes para productos y/o recipientes diferentes, los cuales respectivamente corresponden a productos reales, así como a recipientes reales diferentes.
2. Procedimiento conforme a la reivindicación 1, donde en cada recipiente real son depositados productos reales de distintas clases de productos de acuerdo a patrones predeterminados, de modo que son producidos empaques reales mixtos, y donde este patrón del controlador es predeterminado al ser ubicados en la pantalla los símbolos representados gráficamente para productos en al menos un símbolo representado gráficamente para el recipiente, hasta que en la pantalla se represente una imagen del empaque real mixto deseado.
3. Procedimiento conforme a una de las reivindicaciones 1 ó 2, donde el movimiento de los símbolos en la pantalla tiene lugar de forma manual mediante un movimiento "drag and drop" (arrastrar y soltar).
4. Procedimiento conforme a una de las reivindicaciones 1 a 3, donde los productos reales son suministrados separadamente de acuerdo a la clase de producto.
5. Procedimiento conforme a una de las reivindicaciones 1 a 4, donde los recipientes reales son llenados completamente.
6. Procedimiento conforme a una de las reivindicaciones 1 a 5, donde en la pantalla se representa una selección de símbolos diferentes para productos y una selección de símbolos diferentes para recipientes y donde estos símbolos son seleccionados por separado o en grupos y pueden ser llevados a una superficie de trabajo común de la pantalla, donde los símbolos para los productos son depositados en el o en los símbolos para los recipientes.
7. Procedimiento conforme a la reivindicación 6, donde en la pantalla se representan de forma simultánea los símbolos para los productos, los símbolos para los recipientes y la superficie de trabajo.
8. Procedimiento conforme a una de las reivindicaciones 1 a 7, donde como robots se utilizan robots Delta.
9. Controlador para la ejecución del procedimiento conforme a una de las reivindicaciones 1 a 8, donde el controlador comprende un programa de computación que contiene una biblioteca de primeros símbolos para productos y una biblioteca de segundos símbolos para recipientes y donde dicho programa convierte una combinación de recipientes/productos reunidos en una pantalla en comandos de control para el control de los robots, los cuales depositan productos reales correspondientes a por lo menos un primer símbolo dentro de un recipiente que corresponde al segundo símbolo.
10. Programa de computación para la ejecución del procedimiento conforme a una de las reivindicaciones 1 a 8, el cual contiene una biblioteca de primeros símbolos para productos y una biblioteca de segundos símbolos para recipientes, donde una combinación de recipientes/productos reunidos en una pantalla se convierte en comandos de control para el control de los robots, los cuales depositan productos reales que corresponden a, por lo menos, un primer símbolo dentro de un recipiente que corresponde a un segundo símbolo.
11. Interfaz gráfica de aplicación para la ejecución del procedimiento conforme a una de las reivindicaciones 1 a 8, donde en una pantalla se representa una lista de primeros símbolos diferentes para productos diferentes y una lista de segundos símbolos diferentes para recipientes, donde además en la pantalla se encuentra presente una superficie de trabajo para depositar primeros símbolos seleccionados para productos en segundos símbolos seleccionados para recipientes en esta superficie de trabajo.
Patentes similares o relacionadas:
Dispositivo de envasado de blíster y procedimiento de envasado de blíster, del 11 de Diciembre de 2019, de JVM Co., Ltd: Dispositivo de envasado de blíster que comprende: un bastidor ; una tolva principal unida al bastidor y configurada para recibir comprimidos; un módulo […]
Proceso para la producción de composiciones hemostáticas secas y estables, del 4 de Abril de 2018, de BAXTER INTERNATIONAL INC.: Proceso para producir una composición hemostática seca y estable, comprendiendo el proceso: a) Proporcionar un primer componente que comprende un preparado seco de trombina, […]
Dispositivo de agarre y transferencia de productos individuales, del 22 de Marzo de 2017, de CAVANNA S.P.A.: Dispositivo de agarre y transferencia de productos (P) individuales, que comprende: - una correa sobre la cual están aleatoriamente dispuestos […]
Aparato de carga de láminas blíster con medios de prevención de rebote, del 9 de Noviembre de 2016, de Manrex Pty. Ltd: Aparato para cargar cavidades individuales de una lámina blíster con dosis que están formadas por pequeños objetos duros liberados dentro de […]
Un sistema para empaque de productos, del 27 de Abril de 2016, de Unisorting S.r.l: Un sistema para empacar productos, que comprende: una máquina clasificadora equipada con un dispositivo de transporte predispuesto para mover los productos […]
 Procedimiento y sistema para agrupar productos individuales en grupos de productos y para suministrar dichos grupos de productos a unos medios de manipulación, en particular para suministrarlos a una máquina empaquetadora, por ejemplo del tipo "saco termosoldado" o una empaquetadora de cajas o similar, del 6 de Abril de 2016, de CAVANNA S.P.A.: Procedimiento para agrupar unos productos individuales 1 en unos grupos de productos 2 y para suministrar dichos grupos de productos 2 a […]
Procedimiento y sistema para agrupar productos individuales en grupos de productos y para suministrar dichos grupos de productos a unos medios de manipulación, en particular para suministrarlos a una máquina empaquetadora, por ejemplo del tipo "saco termosoldado" o una empaquetadora de cajas o similar, del 6 de Abril de 2016, de CAVANNA S.P.A.: Procedimiento para agrupar unos productos individuales 1 en unos grupos de productos 2 y para suministrar dichos grupos de productos 2 a […]
 SISTEMA PARA COLOCAR ORDENADAMENTE ELEMENTOS, del 11 de Septiembre de 2015, de TECNIA AUTOMATIZACIÓN, S.L.U: Sistema para colocar ordenadamente elementos, que comprende una cinta transportadora de longitud variable que se proyecta o se retrae para transportar […]
SISTEMA PARA COLOCAR ORDENADAMENTE ELEMENTOS, del 11 de Septiembre de 2015, de TECNIA AUTOMATIZACIÓN, S.L.U: Sistema para colocar ordenadamente elementos, que comprende una cinta transportadora de longitud variable que se proyecta o se retrae para transportar […]
Máquina para envasar artículos dentro de contenedores, del 17 de Diciembre de 2014, de CT PACK S.R.L.: Máquina para envasar artículos dentro de contenedores; comprendiendo la máquina al menos un transportador provisto de una sección de transporte longitudinalmente […]