Máquina para envasar artículos dentro de contenedores.
Máquina para envasar artículos dentro de contenedores; comprendiendo la máquina (1) al menos un transportador (6) provisto de una sección de transporte (7) longitudinalmente móvil para alimentar los artículos (2) en una dirección (D) dada y a lo largo de una trayectoria de transporte (P)dada;
una estación (20) para cargar los artículos (2) en una dirección sobre la sección de transporte (7); medios sensores (22) dispuestos a lo largo de la trayectoria de transporte (P) para detectar al menos la posición de cada artículo (2) sobre la sección de transporte (7); al menos un robot (23) dispuesto a lo largo de la trayectoria de transporte (P); medios de control (25) conectados a dichos medios sensores (22) y a dicho robot (23) para proporcionar al robot (23) instrucciones para recoger artículos (2) individuales de la sección de transporte (7) y transferir cada artículo (2) recogido dentro de un contenedor (3), en la que la sección de transporte (7) está delimitada transversalmente por las paredes laterales (18) configuradas para estabilizar la posición y dirección de cada artículo (2) respecto de la propia sección de transporte (7); estando dichos artículos (2) asentados de manera estable sobre la sección de transporte (7) entre las paredes laterales (18), uno detrás de otro, en la dirección de transporte (D), estando la máquina (1) caracterizada por dichas paredes laterales (18) mutuamente convergentes hacia la parte inferior (16) de la sección de transporte (7), transversalmente a la dirección de transporte (D), extendiéndose dichas paredes laterales (18) longitudinalmente a lo largo de la misma dirección de transporte (D) y siendo movibles en la dirección de transporte (D), extendiéndose dichas paredes (18) con una superficie continua desde la parte inferior (16) de la sección de transporte (7) y definen transversalmente una ranura (19) para recibir dichos artículos (2), estando cada artículo (2) retenido , con contacto, entre dichas paredes (18) en una posición estable y fija sobre la sección de transporte (7).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11175502.
Solicitante: CT PACK S.R.L..
Inventor/es: DAVI\', DANIELE, PALLARA,MICHELE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B25/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › Embalaje de otros objetos que presentan problemas particulares (atadura en paquetes B65B 27/00).
- B65B35/24 B65B […] › B65B 35/00 Suministro, alimentación, disposición u orientación de artículos a ser empaquetados. › por correas o cadenas sin fin.
- B65B35/36 B65B 35/00 […] › por zarpas.
- B65B5/10 B65B […] › B65B 5/00 Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros. › Llenado de receptáculos o recipientes, progresivamente o por etapas sucesivas, introduciendo sucesivamente los objetos o capas de objetos.
- B65B5/12 B65B 5/00 […] › Introducción sucesiva de objetos, de forma o dimensiones diferentes, en posiciones predeterminadas, p. ej. productos de confitería.
- B65B57/10 B65B […] › B65B 57/00 Dispositivos de control automático, de verificación, de alarma, o de seguridad (posicionado del material de envoltura o formando receptáculo alimentado a partir de bobinas B65B 41/18). › sensibles a la ausencia, presencia, a la alimentación anormal o a mala posición de los objetos o productos a embalar.
- B65G17/06 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 17/00 Transportadores que tienen un elemento de tracción sin fin, p.ej. una cadena que transmite el movimiento a una superficie portante de cargas continua o sensiblemente continua, o a una serie de portacargas individuales; Transportadores de cadenas sin fin en los que las cadenas constituyen la superficie que lleva la carga. › con superficie portante formada por una serie de eslabones, placas o plataformas unidas entre sí, p. ej. longitudinales.
- B65G17/08 B65G 17/00 […] › estando la superficie formada por el elemento de tracción.
- B65G17/12 B65G 17/00 […] › que comprende una serie de portacargas individuales fijadas o normalmente fijadas al elemento de tracción.
- B65G17/32 B65G 17/00 […] › Portacargas individuales.
PDF original: ES-2531441_T3.pdf
Fragmento de la descripción:
Máquina para envasar artículos dentro de contenedores
La presente invención se refiere a una máquina para envasar artículos dentro de contenedores.
Más en particular, la máquina según la presente invención es del tipo que comprende al menos un transportador provisto de una sección de transporte longitudinalmente móvil para alimentar los artículos en una dirección dada y a lo largo de una trayectoria de transporte dada; una estación para cargar los artículos sobre la sección de transporte; medios sensores dispuestos a lo largo de la trayectoria de transporte para detectar al menos la posición de cada artículo sobre la sección de transporte; al menos un robot dispuesto a lo largo de la trayectoria de transporte; medios de control conectados a dichos medios sensores y a dicho robot para proporcionar al robot instrucciones para recoger artículos individuales de la sección de transporte y transferir cada artículo recogido dentro de un contenedor.
Una máquina de este tipo es conocida, por ejemplo, a partir de la Patente Europea EP 0856465 B1 a nombre de Gerhard Schubert GmbH. En esta máquina, los artículos se cargan a granel sobre la sección operativa de transporte de una cinta transportadora plana. Aguas abajo de la estación de carga la posición y la dirección de cada artículo sobre la cinta transportadora es después detectado para de este modo a continuación un robot, dispuesto a lo largo de la trayectoria de transporte aguas abajo de la estación de detección, pueda recoger cada artículo y luego transferirlo dentro de un contenedor.
En una máquina de este tipo, los artículos redondos, cuando permanecen en la cinta transportadora con su superficie convexa, pueden empezar a rodar de manera no deseable sobre la cinta entre el momento en que su posición y dirección son detectadas y el momento en que deben ser cogidos por el robot. Como consecuencia, el robot puede no coger un artículo correctamente o no cogerlo del todo.
El documento US4694637 divulga una máquina para envasar artículos tales como conos de helados.
Los artículos avanzan por un transportador que tiene una pluralidad de soportes fijados a una cadena.
Un sistema de vigilancia detecta la presencia de los artículos para activar una pinza cuando se detecta un grupo
entero de artículo.
Tal máquina no permite el envasado de artículos de diferente dimensión o forma y cualquier modificación en la forma/dimensión de los artículos a envasar requiere una adaptación particularmente larga de implementar de la propia máquina.
El documento FR1240729 divulga un transportador para transportar artículos.
Tal transportador se puede usar en diferentes tipos de máquinas y comprende una pluralidad de contenedores configurados para contener uno o más artículos durante el transporte.
Tales contenedores están conectados a una cadena de tal manera que se desplazan en un bucle cerrado.
El objeto de la presente invención es proporcionar una máquina para envasar artículos dentro de contenedores que no tienen el inconveniente mencionado anteriormente. Según la presente invención se proporciona una máquina para envasar artículos dentro de contenedores, comprendiendo dicha máquina los elementos característicos presentes en una o más de las reivindicaciones anexas. Las características técnicas de la invención se pueden determinar claramente a partir de los contenidos de las reivindicaciones anexas y las ventajas de las mismas se pondrán de manifiesto más claramente a partir de la siguiente descripción detallada, con referencia a los dibujos anexos que ilustran una realización no limitativa y meramente a modo de ejemplo de la misma, donde:
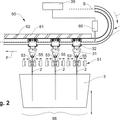
la figura 1 muestra esquemáticamente una vista frontal, parcialmente en forma de bloque, de una máquina para envasar artículos dentro de contenedores, proporcionada según la presente invención; la figura 2 muestra esquemáticamente una vista en perspectiva de parte de la máquina mostrada en la figura 1;
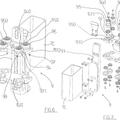
la figura 3 muestra una vista en perspectiva de una porción de un transportador de eslabones que forma parte de la máquina mostrada en la figura 1;
las figuras 3a y 3b muestran una vista en perspectiva, de arriba a abajo, respectivamente, de una sección del transportador mostrado en la figura 3;
las figuras 4a-4d se refieren a respectivas variantes, mostradas en sección transversal, de los eslabones de del transportador según la figura 3.
En las figuras 1 y 2, el número de referencia 1 indica en su totalidad una máquina para envasar artículos 2 dentro de contenedores 3.
Los artículos 2 son preferiblemente, pero no exclusivamente, productos alimentarios. En este ejemplo los artículos 2 consisten en conos de helados 2 con una forma alargada, más exactamente cónica y un eje longitudinal 4 principal de extensión.
Los contenedores 3 son preferiblemente, pero no exclusivamente, cajas de cartón 3.
Los artículos 2 se envasan, preferiblemente pero no exclusivamente, en grupos ordenados 5 dentro de respectivos contenedores 3.
En el ejemplo mostrado, la máquina 1 es apropiada para llevar a cabo el envasado automático de conos de helado 2 dentro de cajas de cartón 3 dentro de cada una de las cuales se dispone un grupo 5 de conos 2 de manera ordenada.
Según un modo preferido de envasado en una o dos capas, los conos 2 unos al lado de otros dentro de cada capa están dispuestos en una dirección girada 180° unos respecto de otros. En el caso de más de una capa, los conos 2 verticalmente alineados de dos capas superpuestas están dispuestos en una dirección girada 180° los unos respecto de los otros.
En ambos casos, los conos 2 están insertados de manera ordenada y predeterminada dentro de la caja 3 para de este modo llenar la caja 3 desperdiciando el menor espacio posible.
La máquina comprende al menos un transportador 6 que está provisto de una sección de transporte 7 longitudinalmente móvil para alimentar los artículos 2 en una dirección D dada y a lo largo de una trayectoria P de transporte rectilínea dada.
El transportador 6 comprende al menos dos poleas 8 con un eje 8a horizontal, al menos una de las cuales es una polea de transmisión y una cadena 9 con eslabones 10 enrollada sin fin alrededor de las poleas 8.
En el ejemplo mostrado las poleas 8 son dos y están dispuestas a la misma altura.
Entre las dos poleas 8, la cadena 9 define en la parte superior, dicha sección de transporte 7 y en la parte inferior, una sección de retorno 1.
La sección de transporte 7 es horizontal. Preferiblemente, la sección de retorno 11 también es horizontal.
Los eslabones 10 se fabrican preferiblemente de plástico.
Los eslabones 10 están articulados entre sí a lo largo de una pared inferior 12 de los mismos mediante respectivas bisagras cilindricas 13 paralelas al eje 8a de las poleas 8 (figuras 3a y 3b).
De esta manera los eslabones 10 pueden girar los unos respecto de los otros, abriéndose a modo de abanico, a lo largo de un arco de devanado alrededor de las poleas 8, pero dispuestas uno al lado del otro, en contacto entre sí, a lo largo de las secciones 7 y 11. Más concretamente, a lo largo de las secciones 7 y 11 los eslabones 10 adyacentes tienen sus paredes exteriores 14, es decir, las paredes que soportan el producto 2 y están situadas en oposición a las paredes inferiores 12, dispuestas las unas al lado de las otras tal como para formar una superficie sustancialmente continua.
Sobre la sección de transporte 7, cada eslabón 10 de la cadena 9 define una porción 15 básica respectiva de la parte inferior 16 de la propia sección de transporte 7. Dos resaltes laterales 17, que están acampanados el uno respecto del otro, sobresalen de la porción 15 y definen con la porción 15 inferior dicha pared exterior 14. Sobre la sección de transporte 7, los resaltes 17 de los eslabones 10 adyacentes definen, con una superficie sustancialmente continua, dos paredes laterales 18 de la propia sección de transporte 7.
Las paredes laterales 18 delimitan transversalmente la sección de transporte 7, son paralelas entre sí y movibles en la dirección de transporte D y convergen mutuamente hacia la parte inferior 16 de la sección de transporte 7, transversalmente a la dirección de transporte D.
Las paredes laterales 18 se extienden con una superficie continua desde la parte inferior 16 de la sección de transporte 7 y definen transversalmente una ranura 19 o una concavidad 19 para recibir los artículos 2.
La ranura 19 y los eslabones 10 tienen, en sección transversal, una forma sustanclalmente triangular, como se ¡lustra más claramente en la figura 4c.
La figura 4d muestra una variación... [Seguir leyendo]
Reivindicaciones:
1.- Máquina para envasar artículos dentro de contenedores; comprendiendo la máquina (1) al menos un transportador (6) provisto de una sección de transporte (7) longitudinalmente móvil para alimentar los artículos (2) en una dirección (D) dada y a lo largo de una trayectoria de transporte (P)dada; una estación (20) para cargar los artículos (2) en una dirección sobre la sección de transporte (7); medios sensores (22) dispuestos a lo largo de la trayectoria de transporte (P) para detectar al menos la posición de cada artículo (2) sobre la sección de transporte (7); al menos un robot (23) dispuesto a lo largo de la trayectoria de transporte (P); medios de control (25) conectados a dichos medios sensores (22) y a dicho robot (23) para proporcionar al robot (23) instrucciones para recoger artículos (2) individuales de la sección de transporte (7) y transferir cada artículo (2) recogido dentro de un contenedor (3), en la que la sección de transporte (7) está delimitada transversalmente por las paredes laterales (18) configuradas para estabilizar la posición y dirección de cada artículo (2) respecto de la propia sección de transporte (7); estando dichos artículos (2) asentados de manera estable sobre la sección de transporte (7) entre las paredes laterales (18), uno detrás de otro, en la dirección de transporte (D), estando la máquina (1) caracterizada por dichas paredes laterales (18) mutuamente convergentes hacia la parte inferior (16) de la sección de transporte (7), transversal mente a la dirección de transporte (D), extendiéndose dichas paredes laterales (18) longitudinalmente a lo largo de la misma dirección de transporte (D) y siendo movibles en la dirección de transporte (D), extendiéndose dichas paredes (18) con una superficie continua desde la parte inferior (16) de la sección de transporte (7) y definen transversal mente una ranura (19) para recibir dichos artículos (2), estando cada artículo (2) retenido , con contacto, entre dichas paredes (18) en una posición estable y fija sobre la sección de transporte (7).
2 - Máquina según una cualquiera de la reivindicación 1 anterior, en la que cada artículo (2) tiene una forma alargada y un eje longitudinal (4) principal de extensión, caracterizada porque dichas paredes (18) definen transversalmente una ranura (19) dentro de la cual cada eje (2) está asentado de manera estable con su eje longitudinal (4) alineado con la dirección de transporte (D).
3 - Máquina según la reivindicación 1 o 2, caracterizada porque dicha ranura (19) tiene, en sección transversal, una forma sustancialmente triangular.
4.- Máquina según la reivindicación 1 o 2, caracterizada porque dicha ranura (19) tiene, en sección transversal, una forma sustancialmente trapezoidal.
- Máquina según una cualquiera de las reivindicaciones 1 a 4, caracterizada porque dicho transportador (6) comprende al menos dos poleas (8), al menos una de las cuales es una polea de transmisión y una cadena (9) con eslabones (10) enrollada sin fin alrededor de dicha polea (8); definiendo la cadena (9), en la parte superior, dicha sección de transporte (7) y en la parte inferior, una sección (11) de retorno.
6 - Máquina según las reivindicaciones 1 y 5, caracterizada porque cada eslabón (10) de la cadena (9) define una porción básica (15) respectiva de dicha parte inferior (16) y dichas paredes (18) laterales.
7 - Máquina según una cualquiera de las reivindicaciones 1 a 6 anteriores, caracterizada porque dicha estación de carga (20) comprende medios de alimentación (21) para cargar los artículos uno detrás de otro en una fila sobre la sección de transporte (7).
8 - Máquina según una cualquiera de las reivindicaciones 1 a 7 anteriores, caracterizada porque dicho robot (23) comprende una cabeza de agarre móvil (24) que tiene un componente de movimiento dirigido a lo largo de la sección de transporte (7) paralela a la dirección de transporte (D).
9 - Máquina según una cualquiera de las reivindicaciones 1 a 8 anteriores, en la que los artículos (2) están envasados en grupos ordenados (5) dentro de contenedores (3) respectivos, caracterizada porque dicho medios de control (25) están programados para proporcionar al robot (23) instrucciones para recoger artículos individuales (2) de la sección de transporte (7) y para transferir cada artículo (2) recogido dentro del mismo contenedor (3) hasta que se alcanza un número predeterminado de artículos (2) insertados, que definen un grupo (5) dentro de dicho contenedor (3).
Patentes similares o relacionadas:
 Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Casete de medicamentos y aparato automático de empaquetado de medicamentos con el mismo, del 27 de Mayo de 2020, de JVM Co., Ltd: Un casete de medicamentos para suministrar automáticamente medicamentos de acuerdo con la información de la prescripción, comprendiendo el casete de medicamentos : un […]
Máquina encajadora de monodosis, del 11 de Marzo de 2020, de IMASDE EXTREMADURA S.L: La máquina encajadora de monodosis está diseñada para realizar el encajado de envases de tipo monodosis de distintos formatos en cajas vacías […]
MÁQUINA DE EMPAQUETADO DE TUBOS CILÍNDRICOS Y PROCESO DEEMPAQUETADO, del 11 de Marzo de 2020, de AKYUREK KARDESLER TARIM URUNLERI MAKINALARI TASIMACILIK VE MADENCILIK SANAYI TICARET LIMITED SIRKETI, SUCURSAL EN ESPAÑA: Máquina de empaquetado de tubos cilíndricos y proceso de empaquetado que se lleva a efecto con dicha máquina, destinada a introducir un conjunto de tubos […]
 Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Dispositivo de envasado de blíster y procedimiento de envasado de blíster, del 11 de Diciembre de 2019, de JVM Co., Ltd: Dispositivo de envasado de blíster que comprende: un bastidor ; una tolva principal unida al bastidor y configurada para recibir comprimidos; un módulo […]
Máquina empaquetadora para morriones de alambre, del 20 de Noviembre de 2019, de GEFIN, S.R.L.: Una máquina empaquetadora para morriones de alambre en contenedores que tienen formas diferentes y predeterminadas, incluyendo: - una estructura de […]
Máquina de embalar, del 20 de Noviembre de 2019, de Mad Automation SRL: Máquina de embalar que comprende: - un transportador de entrada para transportar productos para su embalaje a lo largo de una dirección de desplazamiento […]