PROCEDIMIENTO DE ACCIONAMIENTO DE UN VEHÍCULO POR MEDIO DE UN DISPOSITIVO DE FRENADO CONTROLABLE.
Procedimiento de accionamiento de un vehículo (2), en el cual se acciona un frenado de ruedas delantera y trasera (6a,
6c) asociadas a un mismo lado del vehículo en función de un dato relativo a un volante de dirección, por ejemplo sin accionar un frenado de otras ruedas (6b, 6d) del vehículo, caracterizado porque: - en ausencia de fallo de un dispositivo de dirección asistida, se acciona el frenado proporcionando a un sistema de control un primer parámetro (P1) relativo al volante; y - en presencia de fallo, se acciona el frenado proporcionando al sistema en lugar del primer parámetro, un segundo parámetro (P2) relativo al volante y diferente del primer parámetro; siendo los parámetros primero y segundo P1 y P2 del tipo: P1 = ángulo_volante_medido; y P2 = ángulo_volante_medido + K * par_volante, Donde «ángulo_volante_medido» designa una posición angular del volante; K es un factor multiplicativo constante o variable; y «par_volante» designa un par ejercido sobre el volante por un conductor
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2005/050591.
Solicitante: RENAULT S.A.S..
Nacionalidad solicitante: Francia.
Dirección: 13-15 QUAI ALPHONSE LE GALLO 92100 BOULOGNE BILLANCOURT FRANCIA.
Inventor/es: CHAUVELIER, ERIC, RICHER, DIDIER, BOONSTRA,Christian.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Julio de 2005.
Clasificación Internacional de Patentes:
- B62D9/00D
Clasificación PCT:
- B62D9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Dirección para ruedas orientables no previstas en otro lugar (indicadores de dirección B62D 15/02).
Clasificación antigua:
- B62D9/00 B62D […] › Dirección para ruedas orientables no previstas en otro lugar (indicadores de dirección B62D 15/02).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2361846_T3.pdf
Fragmento de la descripción:
La invención se refiere al accionamiento de los vehículos automóviles, en particular al accionamiento del frenado y de la dirección del vehículo.
Se conocen vehículos que comprenden sistemas de frenado controlables (denominados ESP o control de trayectoria) que permiten frenar individualmente cada rueda del vehículo. Tal sistema se activa durante una urgencia cuando la trayectoria real del vehículo presenta una desviación demasiado importante con respecto a una trayectoria de referencia o trayectoria de objetivo calculada a partir de un modelo basado por ejemplo en un ángulo del volante y en la velocidad del vehículo. Este sistema actúa hasta hacer el que vehículo vuelva a una trayectoria próxima a la estimada mediante el modelo, es decir hasta que el umbral de desactivación del sistema se haya alcanzado. Es así como, en caso de un sub-viraje efectuado por el vehículo, el sistema frena las cuatro ruedas con esfuerzos más importantes sobre las ruedas interiores y actúa igualmente sobre el par motor. Sigue un momento de derrape y una desaceleración que permiten alcanzar la trayectoria prevista o aproximarse a ella.
El documento EP 0 829 416 describe un procedimiento de accionamiento de un vehículo de acuerdo con el preámbulo de la reivindicación 1, en el cual se acciona un frenado de ruedas en función de un dato relativo a un volante de dirección.
El documento EP 0 231 160 describe un procedimiento similar pero aplicado esencialmente a los vehículos de orugas.
Un objeto de la invención es mejorar incluso el control de la trayectoria del vehículo.
A este efecto, se prevé de acuerdo con la invención un procedimiento de accionamiento de un vehículo de acuerdo con la reivindicación 1 adjunta.
Así, el accionamiento del frenado permite tener en cuenta una acción del conductor del vehículo sobre el volante con el fin de que la trayectoria del vehículo corresponda más fielmente al deseo del conductor traducido por este último mediante su acción sobre el volante.
La invención podrá presentar además al menos una cualquiera de las características siguientes:
- se acciona el frenado en función de un par ejercido sobre el volante;
- se acciona el frenado en función de una posición angular del volante;
- se acciona el frenado en función de una velocidad del vehículo;
- se acciona el frenado por medio de un sistema de control individual del frenado de cada rueda; y
- se acciona el frenado en ausencia de fallo de un dispositivo de dirección asistida.
Se conocen además vehículos equipados con un sistema de dirección asistida (denominado DAE, DAH, GEP,…). El objetivo de estos sistemas es aportar un par para ayudar al conductor a girar las ruedas con el fin de dirigir el vehículo. Estos sistemas participan por consiguiente en la seguridad del conductor y en la comodidad de la conducción. Pero si tal sistema sufre un fallo, su desactivación total o parcial puede perturbar la trayectoria del vehículo. Así, si tiene lugar un corte de alimentación en el sistema de dirección asistida, el vehículo puede hacerse difícil de controlar por el conductor.
Este inconveniente es tanto más sensible en cuanto que hoy en día los vehículos son cada vez más pesados y los sistemas de dirección asistida cada vez más potentes con el objeto de mejorar la comodidad y la seguridad. Así, los vehículos fabricados hace algunos años eran más ligeros, de manera que los problemas resultantes de una pérdida de asistencia en el sistema de dirección eran menos críticos. Es el despliegue de estos sistemas en vehículos de alta gama y pesados lo que conduce a hacer más críticos los fallos de estos sistemas.
Ventajosamente, en el marco del procedimiento de la invención, se acciona el frenado en caso de fallo de un dispositivo de dirección asistida.
Así, el accionamiento del frenado permite limitar la gravedad de una pérdida de asistencia de dirección ayudando a dirigir el vehículo.
El procedimiento de acuerdo con la invención podrá presentar además al menos una cualquiera de las características siguientes:
- se detecta un fallo de un dispositivo de dirección asistida;
- se acciona el frenado con vistas a reducir una desviación entre una trayectoria real del vehículo y una trayectoria de referencia;
- en ausencia de fallo de un dispositivo de dirección asistida, se acciona el frenado proporcionando a un sistema de control un primer parámetro relativo al volante y en presencia de fallo, se acciona el frenado proporcionando al sistema en lugar del primer parámetro, un segundo parámetro relativo al volante y diferente del primer parámetro; y
- los parámetros primero y segundo P1 y P2 son del tipo:
P1 = ángulo_volante_medido; Y
P2 = ángulo_volante_medido + K * par_volante,
donde «ángulo_volante_medido» designa una posición angular del volante;
K es un factor multiplicativo constante o variable; y
«par_volante» designa un par ejercido sobre el volante por un conductor.
Se prevé generalmente de acuerdo con la invención un sistema de accionamiento de un vehículo que comprende medios aptos para accionar un frenado de ruedas delantera y trasera asociadas a un mismo lado del vehículo y dispuesto para accionar el frenado en función de un dato relativo a un volante de dirección, por ejemplo sin accionar un frenado de otras ruedas del vehículo.
Se prevé finalmente de acuerdo con la invención un vehículo equipado con un sistema de acuerdo con la invención.
Otras características y ventajas de la invención resultarán evidentes además en la descripción siguiente de un modo preferido de realización dado a título de ejemplo no limitativo en referencia a los dibujos adjuntos, en los cuales:
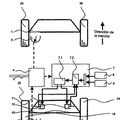
- la figura 1 es una vista esquemática de un vehículo que comprende un sistema de acuerdo con la invención; y
- la figura 2 es un organigrama que muestra el desarrollo del procedimiento de acuerdo con la invención puesto en práctica por el sistema del vehículo de la figura 1.
Se va a describir un modo preferido de realización del sistema de acuerdo con la invención que pone en práctica el procedimiento de acuerdo con la invención con la ayuda de las figuras 1 y 2.
El vehículo 2 está equipado con un dispositivo de dirección asistida 4 que comprende en particular un accionador tal como un motor eléctrico. Este dispositivo, de manera conocida en sí, aporta un par para ayudar al conductor a girar las ruedas a partir del volante de dirección con el fin de dirigir el vehículo particularmente en un viraje o en la salida de un viraje.
El vehículo está igualmente equipado con un dispositivo de frenado que permite controlar individualmente el frenado de cada una de las cuatro ruedas 6a-6d del vehículo. De manera conocida en sí, este sistema, por ejemplo del tipo ESP, se activa automáticamente cuando la trayectoria real del vehículo presenta una desviación demasiado importante con respecto a una trayectoria de referencia calculada por un ordenador de a bordo a partir de un modelo basado por ejemplo en el ángulo del volante y en la velocidad del vehículo.
De manera más global, el vehículo tiene una arquitectura material que comprende uno o varios captadores que permiten estimar la voluntad del conductor en términos de dirección (por ejemplo la posición angular del volante así como el par ejercido por el conductor sobre el volante) y medios electrónicos de cálculo que forman parte del sistema de frenado controlable y/o del dispositivo de dirección asistida.
De manera conocida en sí, el dispositivo de asistencia de dirección determina un par de asistencia, como se ilustra en la etapa 8 de la figura 2, a partir de datos tales como el ángulo del volante, el par ejercido sobre el volante por el conductor y la velocidad del vehículo. El par de asistencia será determinada a partir de al menos uno cualquiera de estos datos y preferentemente de una combinación de los tres.
El dispositivo de dirección asistida está equipado en este caso de manera conocida en sí con medios de vigilancia de su buen funcionamiento que le permiten detectar una eventual avería parcial o total. Si esta avería no permite ya un funcionamiento seguro del dispositivo, la potencia mecánica nominal ya no será proporcionada al conductor para la asistencia del mando de dirección.... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de accionamiento de un vehículo (2), en el cual se acciona un frenado de ruedas delantera y trasera (6a, 6c) asociadas a un mismo lado del vehículo en función de un dato relativo a un volante de dirección, por ejemplo sin accionar un frenado de otras ruedas (6b, 6d) del vehículo, caracterizado porque:
- en ausencia de fallo de un dispositivo de dirección asistida, se acciona el frenado proporcionando a un sistema de control un primer parámetro (P1) relativo al volante; y
- en presencia de fallo, se acciona el frenado proporcionando al sistema en lugar del primer parámetro, un segundo parámetro (P2) relativo al volante y diferente del primer parámetro; siendo los parámetros primero y segundo P1 y P2 del tipo: P1 = ángulo_volante_medido; y P2 = ángulo_volante_medido + K * par_volante, Donde «ángulo_volante_medido» designa una posición angular del volante;
K es un factor multiplicativo constante o variable; y «par_volante» designa un par ejercido sobre el volante por un conductor.
2. Procedimiento de acuerdo con la reivindicación precedente, caracterizado porque se acciona el frenado en función de un par ejercido sobre el volante.
3. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque se acciona el frenado en función de una posición angular del volante.
4. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque se acciona el frenado en función de una velocidad del vehículo.
5. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque se acciona el frenado por medio de un sistema de control individual del frenado de cada rueda.
6. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque se acciona el frenado en ausencia de fallo de un dispositivo de dirección asistida.
7. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque se acciona el frenado en caso de fallo de un dispositivo de dirección asistida.
8. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque se detecta un fallo de un dispositivo de dirección asistida.
9. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque se acciona el frenado con vistas a reducir una desviación entre una trayectoria real del vehículo y una trayectoria de referencia.
10. Sistema de accionamiento de un vehículo que comprende medios aptos para accionar un frenado de ruedas delatara y trasera asociadas a un mismo lado del vehículo, dispuesto para accionar el frenado en función de un dato relativo a un volante de dirección, por ejemplo sin accionar un frenado de otras ruedas del vehículo, caracterizado porque:
- en ausencia de fallo de un dispositivo de dirección asistida, se acciona el frenado proporcionando a un sistema de control un primer parámetro (P1) relativo al volante; y
- en presencia de fallo, se acciona el frenado proporcionando al sistema en lugar del primer parámetro, un segundo parámetro (P2) relativo al volante y diferente del primer parámetro; siendo los parámetros primero y segundo P1 y P2 del tipo:
P1 = ángulo_volante_medido; y P1 = ángulo_volante_medido + K * par_volante,
donde «ángulo_volante_medido» designa una posición angular del volante;
K es un factor multiplicativo constante o variable; y «par_volante» designa un par ejercido sobre el volante por un conductor.
11. Vehículo caracterizado porque comprende un sistema de acuerdo con la reivindicación precedente.
Patentes similares o relacionadas:
PROCEDIMIENTO DE ACCIONAMIENTO DE UN VEHÍCULO DE CUATRO RUEDAS DIRECTRICES CON LA AYUDA DE UN DISPOSITIVO DE FRENADO INDIVIDUAL DE LAS RUEDAS, del 4 de Febrero de 2011, de RENAULT S.A.S.: Procedimiento de accionamiento de un vehículo, que comprende las etapas - cuando se detecta que la desviación sobrepasa un umbral predeterminado, […]
 DIRECCION DE EJE TRASERO PARA UNA GRUA DE VEHICULO, del 14 de Abril de 2010, de TEREX DEMAG GMBH: Dirección de eje trasero para una grúa de vehículo, que presenta al menos un eje trasero dirigido activamente con ruedas dispuestas en el mismo, que comprende:
- […]
DIRECCION DE EJE TRASERO PARA UNA GRUA DE VEHICULO, del 14 de Abril de 2010, de TEREX DEMAG GMBH: Dirección de eje trasero para una grúa de vehículo, que presenta al menos un eje trasero dirigido activamente con ruedas dispuestas en el mismo, que comprende:
- […]
 Procedimiento y sistema para el tratamiento previo de cartón, del 28 de Junio de 2019, de Highcon Systems Ltd: Un sistema de tratamiento previo de cartón, que comprende:
un módulo de ranurar para crear en un cartón ranuras alrededor de […]
Procedimiento y sistema para el tratamiento previo de cartón, del 28 de Junio de 2019, de Highcon Systems Ltd: Un sistema de tratamiento previo de cartón, que comprende:
un módulo de ranurar para crear en un cartón ranuras alrededor de […]
Procedimiento de control de la trayectoria de un vehículo con los frenos sin mando del volante de dirección, del 10 de Octubre de 2018, de PSA Automobiles SA: Procedimiento de control de la trayectoria de un vehículo automóvil en ausencia de mando del volante de dirección , que utiliza un sistema de […]
Portaruedas, del 15 de Marzo de 2017, de Ningbo Geely Automobile Research & Development Co., Ltd: Un portaruedas montado en un cuerpo del eje trasero, dicho portaruedas que comprende una placa de sujeción y una placa de soporte […]
Sistema de dirección para vehículos a motor, en particular para máquinas agrícolas, del 13 de Julio de 2016, de CNH Industrial Italia S.p.A: Sistema de dirección para vehículos a motor , en particular para máquinas agrícolas, que comprende: - un primer conjunto de dirección […]
TRACTOR CON UN MAYOR ÁNGULO DE DIRECCIÓN, del 28 de Diciembre de 2011, de BCS S.P.A.: Tractor con un mayor ángulo de dirección, que comprende un chasis , un eje de dirección frontal , medios para conectar dicho eje frontal […]
 TRACTOR ARTICULADO CON RUEDAS DELANTERAS DE DIRECCION, del 10 de Mayo de 2010, de BCS S.P.A.: Tractor agrícola articulado que comprende una parte delantera y una parte trasera , articuladas juntas mediante una articulación central , soportando […]
TRACTOR ARTICULADO CON RUEDAS DELANTERAS DE DIRECCION, del 10 de Mayo de 2010, de BCS S.P.A.: Tractor agrícola articulado que comprende una parte delantera y una parte trasera , articuladas juntas mediante una articulación central , soportando […]