SISTEMA Y PROCEDIMIENTO PARA DESPLAZAR UN PUNTO DE FOCALIZACION DE UNA RADIACION LASER DE POTENCIA.
Sistema para desplazar un punto (4) de focalización de una radiación láser de potencia a lo largo de una trayectoria (6) presenta en la superficie de un objeto que se va a tratar,
siendo la radiación láser apta para calentar dicha superficie a fin de realizar unas operaciones de soldadura/de corte o de soldadura a tope, comprendiendo este sistema
- un dispositivo (42) de colimación de la radiación láser,
- una lente (50) de focalización de la radiación láser colimada sobre el punto de focalización,
- un dispositivo (24) de desplazamiento en traslación de la lente de focalización (50) con respecto al dispositivo de colimación (42), para desplazar el punto (4) de focalización de la radiación láser desplazando únicamente la lente de focalización (50), y
- un robot equipado con un brazo articulado, estando montado el dispositivo de desplazamiento de la lente de focalización en el extremo de este brazo articulado, caracterizado por el hecho de que el robot es apto para desplazar el extremo de este brazo articulado a lo largo de una trayectoria pre-grabada, que corresponde aproximadamente a la trayectoria presente en la superficie del objeto que se va tratar, asociándose el robot (14) a un medio de almacenamiento de informaciones (30), el cual contiene la trayectoria pre-grabada, que debe seguir el punto de focalización (4), y comprendiendo el robot (14) unos medios para convertir esta trayectoria pregrabada en instrucciones para desplazar el punto de focalización (4) aproximadamente a lo largo de la trayectoria (6), y por el hecho de que el dispositivo (24) de desplazamiento es apto para desplazar la lente de focalización (50) con respecto a la trayectoria pregrabada de manera a compensar una divergencia o diferencia entre la posición actual del punto de focalización y la trayectoria sobre la superficie del objeto en el momento de los desplazamientos del extremo del brazo articulado a lo largo de la trayectoria pre-grabada, comprendiendo el sistema una fuente (46) de radiación coherente apropiada para trazar sobre la superficie del objeto a tratar una señal luminosa, la cual indica la posición de la trayectoria (6), así como unos medios de localización (54) de una señal luminosa (56) la cual representa la posición de la trayectoria (6), y una unidad de sometimiento o sujeción (48), que comprende un módulo de análisis (86) de las señales transmitidas por los medios de localización (54) a fin de establecer un valor de divergencia o diferencia entre la posición real del punto de focalización (4) y la trayectoria (6), y un módulo de mando (88) del dispositivo de desplazamiento (24) en función del valor de divergencia establecido por el módulo de análisis (86)
Tipo: Resumen de patente/invención. Número de Solicitud: W03003403FR.
Solicitante: LE CONTROLE INDUSTRIEL.
Nacionalidad solicitante: Francia.
Dirección: IMMEUBLE ATLAS, 3, AVENUE DE LA BALTIQUE,VILLEBON SUR YVETTE, 91953 COU.
Inventor/es: ROUAUD, CHARLES, GAUSSON,CHRISTOPHE, DANG,TAT THANH.
Fecha de Publicación: .
Fecha Concesión Europea: 17 de Septiembre de 2008.
Clasificación Internacional de Patentes:
- B23K26/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › B23K 26/00 Trabajo por rayos láser, p. ej. soldadura, corte o taladrado. › Alineación, apuntado o focalización automáticos del haz de rayos láser, p. ej. utilizando la luz difundida de vuelta.
- B23K26/04A2
- B23K26/08L2B
- B23K26/24 B23K 26/00 […] › Soldadura por costuras.
Clasificación PCT:
- B23K26/02 B23K 26/00 […] › Colocación o vigilancia de las piezas, p. ej. con relación al punto de impacto; Alineación, apuntamiento o focalización del haz de rayos láser.
- B23K26/20 B23K 26/00 […] › Unión (soldadura sin fusión por energía radiante B23K 1/005; unión de elementos plásticos preformados por calentamiento mediante láser B29C 65/16).
- B23K26/38 B23K 26/00 […] › mediante escariado o corte.
Clasificación antigua:
- B23K26/02 B23K 26/00 […] › Colocación o vigilancia de las piezas, p. ej. con relación al punto de impacto; Alineación, apuntamiento o focalización del haz de rayos láser.
- B23K26/20 B23K 26/00 […] › Unión (soldadura sin fusión por energía radiante B23K 1/005; unión de elementos plásticos preformados por calentamiento mediante láser B29C 65/16).
- B23K26/38 B23K 26/00 […] › mediante escariado o corte.
Fragmento de la descripción:
Sistema y procedimiento para desplazar un punto de focalización de una radiación láser de potencia.
La invención se refiere a un sistema y a un procedimiento para desplazar un punto de focalización de una radiación láser de potencia a lo largo de una trayectoria presente sobre la superficie de un objeto a tratar de conformidad con el preámbulo de las reivindicaciones 1 y 11 (véase, por ejemplo, JP 59/141 392 A).
Los sistemas conocidos de este tipo comportan, al menos:
- - un dispositivo de colimación de la radiación láser, y
- - un dispositivo de focalización de la radiación láser colimada sobre el punto de focalización.
En el caso de los sistemas conocidos, se admite que los ejes del dispositivo de focalización y del dispositivo de colimación deben coincidir. Por consiguiente, en los sistemas conocidos, el dispositivo de focalización y el dispositivo de colimación van rígidamente fijos a un mismo bastidor movible de manera a mantener una alineación constante entre los dos dispositivos. Por tanto, para desplazar el punto de focalización creado por el dispositivo de focalización a lo largo de una trayectoria presente sobre la superficie de un objeto a tratar, es necesario desplazar el bastidor, sobre el cual van fijados los dispositivos de colimación y de focalización. En el caso en que la radiación láser de potencia se utiliza para soldar entre sí unas placas metálicas, el peso de un tal bastidor movible varía de 7 a 10 kgs. En efecto, además de los dispositivos de colimación y de focalización, el bastidor se usa igualmente para fijar otros elementos, tales como toberas o boquillas de soplado de gas inerte, medios de guía de hilo o alambre de aporte u otros.
Clásicamente, la posición de este bastidor movible está sujeta a la de la trayectoria a seguir sobre el objeto. Sin embargo, aunque la posición de este bastidor movible se someta o sujete a la trayectoria a seguir, se señalan unas divergencias importantes, del orden de 0,5 a 1 mm. entre la posición real del punto de focalización y la trayectoria a seguir cuando esta trayectoria presenta unos ángulos. Por ejemplo, si la trayectoria es rectilínea sobre algunos centímetros, luego vuelve al ángulo recto describiendo un cuarto de círculo, cuyo radio de curvatura queda comprendido entre 20 y 50 mm. se observa frecuentemente una divergencia o diferencia máxima de 0,7 mm. entre la posición del punto de focalización y la trayectoria a seguir. En efecto, la precisión del sometimiento queda limitada para la energía cinética del bastidor movible. Se ha propuesto reducir esta diferencia o divergencia limitando la velocidad de desplazamiento del bastidor movible, pero una medida de esta naturaleza es contraproductiva. Otra solución consistiría en utilizar un accionador más potente para mandar los desplazamientos del bastidor movible. Sin embargo, este accionador va generalmente montado en el extremo de un brazo articulado de un robot adecuado para desplazar el accionador a lo largo de una trayectoria aproximativa pre-registrada, no desplazando el accionador el bastidor movible más que para compensar las diferencias o divergencias entre esta trayectoria pre-registrada y la trayectoria presente sobre la superficie del objeto que se va a tratar. No se puede aumentar el peso de este accionador, puesto que es transportado el mismo por el brazo del robot. Así pues, la potencia de este accionador no se puede acrecentar de manera inconsiderada sin penalizar los rendimientos de los sistemas por otro lado. Se comprende, pues, que a causa de la potencia limitada del accionador las divergencias o diferencias observadas se provoquen por la incapacidad de este accionador para compensar eficazmente la energía cinética del bastidor movible.
En US 4 997 150, US 4 896 944, US 5 059 759 y US 5 667 707 se describen unos dispositivos de desplazamiento de una lente de focalización con respecto a un dispositivo de colimación.
La invención trata de remediar este inconveniente al proponer un sistema, en el cual se limitan las diferencias o discrepancias entre la trayectoria efectivamente seguida por el punto de focalización y la trayectoria a seguir sobre la superficie del objeto que se va a tratar.
Así pues, la invención tiene por objeto un sistema conforme a la reivindicación 1 para desplazar un punto de focalización de una radiación láser de potencia a lo largo de una trayectoria presente sobre la superficie de un objeto que se va a tratar.
En el caso del sistema descrito más arriba, ya no es el conjunto formado por el dispositivo de focalización y el dispositivo de colimación el que se desplaza, sino solamente el dispositivo de focalización. Por consiguiente, ya no es necesario montar el dispositivo de colimación sobre el bastidor movible, y el peso del bastidor movible se encuentra aligerado. Por consiguiente, se reducen los errores de sujeción o por sometimiento debidos a la energía sin que sea necesario limitar la velocidad de desplazamiento del bastidor movible o utilizar un accionador más potente.
Otras características del sistema conforme a la invención aparecen en las reivindicaciones dependientes.
La invención tiene igualmente por objeto un procedimiento conforme a la reivindicación 11 para desplazar un punto de focalización de una radiación láser de potencia a lo largo de una trayectoria presente sobre la superficie de un objeto.
Otras características de un procedimiento conforme a la invención se ponen de manifiesto en las reivindicaciones dependientes.
La invención será comprendida mejor con la lectura de la subsiguiente descripción, dada únicamente a título de ejemplo, y refiriéndose a los dibujos, en los cuales:
- la figura 1 es una ilustración esquemática de un sistema para desplazar un punto de focalización de una radiación láser de potencia conforme a la invención;
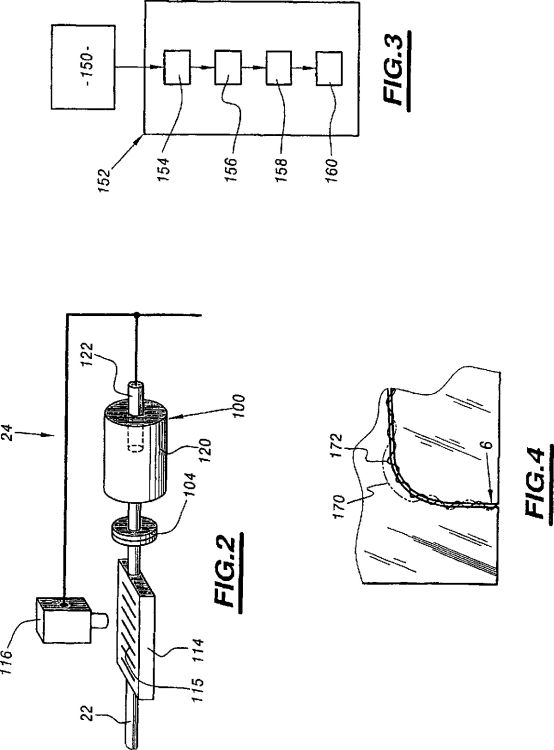
- la figura 2 es una vista agrandada de una porción de un dispositivo de desplazamiento utilizado en el sistema de la figura 1;
- la figura 3 es un organigrama de un procedimiento para desplazar un punto de focalización de una radiación láser de potencia conforme a la invención; y
- la figura 4 es una ilustración esquemática de trayectorias seguidas por un punto de focalización, obtenidas con la ayuda de un sistema conocido y de un sistema conforme a la invención.
La figura 1 representa un sistema, designado por la referencia general 2, para desplazar un punto 4 de focalización de una radiación láser de potencia destinada a calentar una junta de soldadura 6 entre dos placas metálicas 8, 10 para soldarlas entre sí a lo largo de esta junta de soldadura 6.
En la figura 1 sólo se representan los elementos necesarios para la realización y para la comprensión de la invención. No han sido representados, de manera a aligerar esta ilustración, los elementos clásicos de los sistemas de soldado mediante láser, tales como, por ejemplo, boquillas o toberas de soplado de gas inerte para evitar la oxidación de la soldadura, o medios para guiar el hilo o alambre de aportación a lo largo de la junta de soldadura.
Aquí, la junta de soldadura 6 forma la trayectoria a seguir sobre la superficie del objeto 8, 10, que se va a tratar. Esta trayectoria a seguir 6 presenta unas partes curvas con un pequeño radio de curvatura, típicamente inferior a 20 mm, hasta incluso unos ángulos agudos u obtusos.
Sobre el punto 4 se representa un punto de referencia ortonormado con tres ejes x, y, z. El eje x es tangente a la trayectoria 6 a nivel del punto de focalización 4. El eje y es ortogonal al eje x y tangente a la superficie del objeto 8, 10 a tratar a nivel del punto de focalización 4. El eje z es ortogonal a la superficie del objeto 8, 10 a nivel del punto de focalización 4.
El sistema 2 comporta principalmente un robot o autómata 14 equipado con un brazo articulado 16 en el extremo del cual se fija, por intermedio de una articulación pivotante 18, un bastidor de soporte 20. Un bastidor movible 20 o equipo movible va unido al bastidor de soporte 20 por intermedio de un dispositivo de desplazamiento 24.
El robot o autómata 14 está asociado a una memoria 30, que constituye un medio de almacenamiento de informaciones y contiene una trayectoria pre-registrada formada, por ejemplo, por una multitud de puntos. Esta trayectoria pre-registrada o pre-grabada corresponde a la trayectoria, que debe seguir el bastidor de soporte 20 para que...
Reivindicaciones:
1. Sistema para desplazar un punto (4) de focalización de una radiación láser de potencia a lo largo de una trayectoria (6) presenta en la superficie de un objeto que se va a tratar, siendo la radiación láser apta para calentar dicha superficie a fin de realizar unas operaciones de soldadura/de corte o de soldadura a tope, comprendiendo este sistema
- - un dispositivo (42) de colimación de la radiación láser,
- - una lente (50) de focalización de la radiación láser colimada sobre el punto de focalización,
- - un dispositivo (24) de desplazamiento en traslación de la lente de focalización (50) con respecto al dispositivo de colimación (42), para desplazar el punto (4) de focalización de la radiación láser desplazando únicamente la lente de focalización (50), y
- - un robot equipado con un brazo articulado, estando montado el dispositivo de desplazamiento de la lente de focalización en el extremo de este brazo articulado,
caracterizado por el hecho de que el robot es apto para desplazar el extremo de este brazo articulado a lo largo de una trayectoria pre-grabada, que corresponde aproximadamente a la trayectoria presente en la superficie del objeto que se va tratar, asociándose el robot (14) a un medio de almacenamiento de informaciones (30), el cual contiene la trayectoria pre-grabada, que debe seguir el punto de focalización (4), y comprendiendo el robot (14) unos medios para convertir esta trayectoria pregrabada en instrucciones para desplazar el punto de focalización (4) aproximadamente a lo largo de la trayectoria (6), y por el hecho de que el dispositivo (24) de desplazamiento es apto para desplazar la lente de focalización (50) con respecto a la trayectoria pregrabada de manera a compensar una divergencia o diferencia entre la posición actual del punto de focalización y la trayectoria sobre la superficie del objeto en el momento de los desplazamientos del extremo del brazo articulado a lo largo de la trayectoria pre-grabada, comprendiendo el sistema una fuente (46) de radiación coherente apropiada para trazar sobre la superficie del objeto a tratar una señal luminosa, la cual indica la posición de la trayectoria (6), así como unos medios de localización (54) de una señal luminosa (56) la cual representa la posición de la trayectoria (6), y una unidad de sometimiento o sujeción (48), que comprende un módulo de análisis (86) de las señales transmitidas por los medios de localización (54) a fin de establecer un valor de divergencia o diferencia entre la posición real del punto de focalización (4) y la trayectoria (6), y un módulo de mando (88) del dispositivo de desplazamiento (24) en función del valor de divergencia establecido por el módulo de análisis (86).
2. Sistema según la reivindicación 1, caracterizado por el hecho de que el dispositivo (24) de desplazamiento en traslación de la lente de focalización (50) es apto para desplazar ésta perpendicularmente con respecto a un eje de la radiación láser colimada.
3. Sistema según la reivindicación 1 o 2, caracterizado por el hecho de que el dispositivo (24) de desplazamiento es apto para introducir una desviación espacial entre unos ejes del dispositivo de colimación y de la lente de focalización, aunque manteniendo estos ejes paralelos.
4. Sistema según una cualquiera de las reivindicaciones precedentes, caracterizado por el hecho de que la lente de focalización (50) es desplazable en traslación únicamente en un plano perpendicular a la trayectoria (6) presente en la superficie del objeto que se va a tratar.
5. Sistema según la reivindicación 4, caracterizado por el hecho de que la lente de focalización (50) es desplazable en traslación en, al menos, dos direcciones diferentes del plano perpendicular a dicha trayectoria (6).
6. Sistema según una cualquiera de las reivindicaciones precedentes, caracterizado por el hecho de que el dispositivo de desplazamiento comprende, al menos, un accionador eléctrico (100) equipado con un bobinado (120) montado desplazable en traslación en un campo magnético, siendo este bobinado (120) apropiado para desplazar la lente de focalización (50) con respecto al dispositivo de colimación.
7. Sistema según la reivindicación 6, caracterizado por el hecho de que comporta una señal (114) de posición espacial del bobinado (120) y unos medios (116) de adquisición de la posición de esta señal para someter o sujetar la posición del bobinado (120) a una consigna de posición, y por el hecho de que la señal de posición del bobinado (120) y la lente de focalización (50) son solidarias de un mismo bastidor (22) desplazable mediante el bobinado (120).
8. Sistema según una cualquiera de las reivindicaciones precedentes, caracterizado por el hecho de que comporta un dispositivo de sometimiento o sujeción (48) apropiado para mandar el dispositivo (24) de desplazamiento de la lente de focalización (50) a fin de someter la posición del punto de focalización (4) a dicha trayectoria.
9. Sistema según una cualquiera de las reivindicaciones precedentes, caracterizado por el hecho de que la radiación coherente atraviesa, a este efecto, dicha lente de focalización (50) de manera a conservar una relación espacial constante entre el punto de focalización y la señal luminosa trazada.
10. Sistema según una cualquiera de las reivindicaciones precedentes, caracterizado por el hecho de que el dispositivo de colimación (42) está rígidamente fijado al extremo del brazo articulado (16).
11. Procedimiento para desplazar un punto de focalización (4) de una radiación láser de potencia a lo largo de una trayectoria (6) presente en la superficie de un objeto que se va a tratar, siendo la radiación láser apta para calentar dicha superficie a fin de realizar unas operaciones de soldadura/de corte o de soldadura a tope, estando destinado este procedimiento para ser realizado en un sistema conforme a una cualquiera de las reivindicaciones precedentes, caracterizado por el hecho de que el procedimiento consiste en desplazar el extremo del brazo articulado a lo largo de una trayectoria pre-grabada, que corresponde aproximadamente a la trayectoria presente en la superficie del objeto que se va a tratar, almacenando la trayectoria pre-grabada, que corresponde aproximadamente a la trayectoria (6) que debe seguir el punto de focalización (4), y convirtiendo esta trayectoria pregrabada en instrucciones para desplazar el punto de focalización (4) aproximadamente a lo largo de la trayectoria (6), y en desplazar la lente de focalización con respecto a la trayectoria pre-grabada de manera a compensar una discrepancia o diferencia entre la posición actual del punto de focalización y la trayectoria sobre la superficie del objeto en el momento de los desplazamientos del extremo del brazo articulado a lo largo de la trayectoria pre-grabada, localizando una señal luminosa (56) de la posición de la trayectoria (6), analizando las señales localizadas para establecer un valor de divergencia o diferencia entre la posición real del punto de focalización (4) y la trayectoria (6), y controlando el dispositivo de desplazamiento (24) en función del valor de discrepancia o divergencia establecido.
12. Procedimiento según la reivindicación 11, caracterizado por el hecho de que consiste en desplazar la lente de focalización (50) únicamente en traslación en un plano perpendicular a la trayectoria presente en la superficie del objeto que se va a tratar.
13. Procedimiento según la reivindicación 12, caracterizado por el hecho de que consiste en desplazar la lente de focalización (50) en traslación en, al menos, dos diferentes direcciones del plano perpendicular a dicha trayectoria.
14. Procedimiento según una cualquiera de las reivindicaciones 11 a 13, caracterizado por el hecho de que somete o sujeta (en 152) los desplazamientos de la lente de focalización (50) a dicha trayectoria (6).
Patentes similares o relacionadas:
Dispositivo de ensamblaje y procedimiento de ensamblaje, del 12 de Febrero de 2020, de VOLKSWAGEN AKTIENGESELLSCHAFT: Dispositivo de ensamblaje para el ensamblaje láser de por lo menos dos piezas (B1, B2), que presenta: un primer generador de radiación láser con una configuración de […]
Método para ensamblar dos componentes en el área de una zona de ensamblaje mediante al menos un rayo láser, y método para producir una costura de ensamblaje continua, del 4 de Diciembre de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Método para ensamblar dos componentes en el área de una zona de ensamblaje, que define las superficies libres que han de ser unidas de los dos componentes, […]
Procedimiento de ensamblaje por soldadura de una chapa de aluminio que tiene una abertura con una chapa de acero, del 6 de Junio de 2018, de PSA Automobiles SA: Procedimiento de ensamblaje de chapas de materiales diferentes, que comprende al menos una etapa de superposición de las chapas y una etapa de soldadura, presentando […]
Procedimiento y dispositivo para soldar estructuras de asiento así como asiento, del 22 de Marzo de 2017, de KUKA Industries GmbH: Procedimiento para la soldadura de estructuras de asiento de asientos , especialmente asientos de automóviles, soldándose una chapa de cubrición en forma de […]
Dispositivo para la unión de dos partes de pieza de trabajo con zonas de diferentes propiedades mediante una soldadura de irradiación láser y un homogeneizador, del 18 de Enero de 2017, de JENOPTIK AUTOMATISIERUNGSTECHNIK GMBH: Dispositivo para la unión de dos partes de pieza de trabajo en una pieza de trabajo mediante soldadura de irradiación, por cordones […]
Método de soldadura de una primera y una segunda pieza de trabajo metálica con pulverización en frío de una capa del material de modificación de la soldadura a una de las superficies, del 21 de Septiembre de 2016, de THE WELDING INSTITUTE: Un método de soldadura de unas primera y segunda piezas de trabajo metálicas delgadas , caracterizadas porque cada una de las primera y segunda piezas de trabajo […]
Procedimiento para procesar un sustrato que tiene dos capas superpuestas usando láser focalizado dentro del sustrato para soldar las capas, del 3 de Agosto de 2016, de Corelase OY (100.0%): Un procedimiento para procesar un sustrato modificando estructuralmente al menos parte de una zona de interfase definida por al menos dos capas superpuestas (28A, […]
Pistola de soldadura láser accionable manualmente, del 27 de Julio de 2016, de IPG Photonics Corporation: Una pistola de soldadura láser accionable manualmente para unir dos o más piezas de metal superpuestas, que comprende: una columna de soporte alargada […]