SISTEMA MAGNETICO DE CONTROL DE TRAFICO.
Dispositivo de medición de signaturas magnéticas de vehículos,
que incluye:
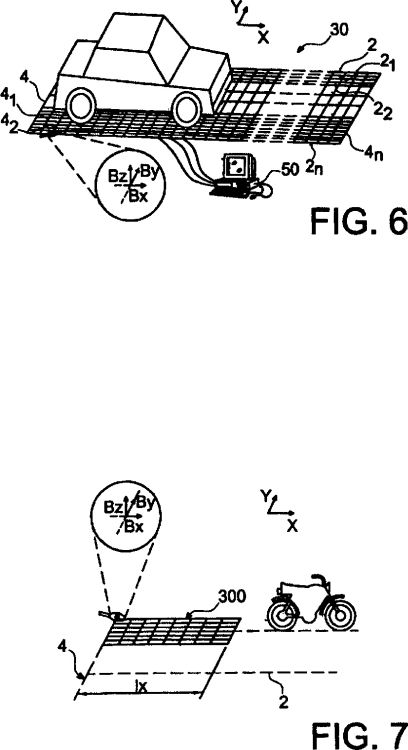
- al menos un primer conjunto de captadores (C x i), destinados a estar colocados a lo largo de al menos una primera dirección (2),
- al menos un segundo conjunto de captadores (C y i), destinados a estar colocados según al menos una segunda dirección (4), que corta la primera en un punto en el que está dispuesto un captador común (C xy 0), perteneciente al primer y al segundo conjuntos,
- medios (50) de cálculo, para calcular una relación entre la signatura temporal S o(t) de un vehículo que pasa por encima del captador común y un perfil espacial So(x) resultante de las mediciones efectuadas por los captadores del primer conjunto de captadores
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07100200.
Solicitante: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Nacionalidad solicitante: Francia.
Dirección: 25, RUE LEBLANC IMMEUBLE LE PONANT D,75015 PARIS.
Inventor/es: GUILHAMAT, BERNARD, CATTIN,VIVIANE, BLANPAIN,ROLAND, FLAMENT,BRUNO.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Enero de 2007.
Fecha Concesión Europea: 19 de Agosto de 2009.
Clasificación Internacional de Patentes:
- G08G1/015 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › con disposiciones para distinguir dos o más tipos de vehículos, p. ej. distinción entre automóviles y ciclos.
- G08G1/042 G08G 1/00 […] › utilizando detectores inductivos o magnéticos.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Sistema magnético de control de tráfico.
Campo técnico y Técnica anterior
La invención se refiere a un procedimiento y un dispositivo de clasificación de vehículos a partir de su signatura electromagnética.
La misma permite recoger datos viarios y, por ejemplo, contar y/o clasificar los vehículos automóviles durante el recorrido de sus trayectos por una calzada.
La invención se refiere por tanto al sector del estudio y control del tráfico viario, por lo que sus aplicaciones son amplias. Se cita a título de ejemplo:
la identificación y la clasificación por tipo de vehículo: un ejemplo característico es la clasificación frente a peaje en autopista para pago automático. El sistema utilizado actualmente en las autopistas está basado en la asociación de varios tipos de captadores:
- un interruptor magnético, formado por dos bucles de corriente, que permite detectar la presencia de un vehículo,
- un captador de tipo piezoeléctrico, dispuesto en la superficie de la calzada, que permite detectar el paso de los ejes de un vehículo para contarlos,
- un captador óptico que forma una cortina colocada transversalmente en la carretera: cuando el vehículo la atraviesa, proporciona una estimación de su altura.
Los principales inconvenientes de este dispositivo son su coste, una falta de robustez (principalmente con relación a las condiciones climáticas), un mantenimiento difícil (debido principalmente al desgaste de los bucles de corriente) y un índice de error de clasificación medio.
La invención permite igualmente la identificación de vehículos particulares, por ejemplo para la regulación del tráfico automóvil, la vigilancia de la frecuentación de una carretera, la optimización de la circulación, el seguimiento de un vehículo por una zona viaria limitada (zona peatonal) o en un aparcamiento, la atribución al vehículo identificado de un servicio particular (plaza de aparcamiento privado, suscripción a una estación de servicio...).
Otra aplicación de la invención consiste en la autenticación de vehículos particulares: por ejemplo, se puede tratar de un vehículo dotado de un sistema de identificación a distancia (etiqueta RFID, por ejemplo), que es validado a través de la lectura y la autenticación de la signatura magnética del vehículo (siendo esta signatura obtenida por medio de un dispositivo o de un procedimiento según la invención).
Existen sistemas basados en magneto-resistencias o en redes de bucles de corriente. Pero son o bien costosos o bien poco eficientes en materia de reconocimiento de vehículos.
Los sistemas magnéticos de control de tráfico se basan en el aprovechamiento de la signatura magnética de un vehículo. Un automóvil es una masa magnética que modifica las líneas de campo puesto que el campo magnético tiene tendencia a tomar el recorrido de mayor permeabilidad magnética. Además, un automóvil puede incluir materiales ferrosos que modifican la dirección y la intensidad del campo magnético. El vehículo está globalmente representado por un conjunto de dipolos magnéticos, que se suman al campo magnético terrestre quiescente (es decir, en reposo temporalmente), y que crean una anomalía magnética que puede ser medida por medio de captadores magnéticos.
Estas señales se utilizan a continuación en un sistema de detección/clasificación cuyo objetivo puede ser el de contar los vehículos o identificarlos. Cada clase puede estar caracterizada por un cierto número de parámetros, de los que los utilizados más habitualmente son el número de ejes, las distancias inter-ejes, la longitud del vehículo, las distancias entre la calzada y la parte baja de la caja y/o entre los ejes.
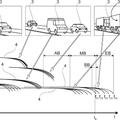
Una de las dificultades de los sistemas de clasificación consiste en la correspondencia tiempo/espacio. En efecto, las signaturas son adquiridas por los captadores magnéticos con el transcurso del tiempo. Estas son, por lo tanto, dependientes de la velocidad del vehículo: las mismas pueden ser comprimidas si el vehículo acelera, dilatadas si frena, o incluso constantes si se para, como se ilustra en la figura 1, en la que las curvas I y II representan, respectivamente, las deformaciones temporales de la signatura de un vehículo que pasa rápidamente sobre un captador, y lentamente, con parada, sobre otro. Por el contrario, la signatura magnética espacial del vehículo es constante.
Se busca por tanto un procedimiento para pasar las signaturas temporales por el campo espacial, de manera independiente de la velocidad y de la trayectoria del vehículo.
La patente FR-2811789 describe un sistema de clasificación de vehículos que permite detectar la signatura electromagnética a partir de un único bucle de corriente. Esta signatura es digitalizada, secuenciada, y después datada. La velocidad de un vehículo puede ser así calculada, buscando el instante en que la tendencia de la signatura deja de seguir una ley exponencial.
Este cálculo no es suficientemente preciso y no permite controlar si el vehículo se ha parado sobre el captador. Las características medidas están restringidas a amplitudes de la señal en su representación temporal y en su representación frecuencial.
La patente US 5331276 describe un sistema de medición de la velocidad que comprende dos magnetómetros FluxGate biaxiales, separados por una distancia conocida y orientados de manera precisa cada uno con respecto al otro. La velocidad de un vehículo que circula por las cercanías se calcula formando la relación entre la derivada temporal del campo medido (dado por la derivada temporal de una señal B de uno de los magnetómetros) y la derivada espacial de las señales medidas (calculada mediante la diferencia instantánea de las dos señales B medidas en los dos magnetómetros). Con el fin de que la diferencia espacial de los campos de los dos captadores sea aproximadamente igual al gradiente espacial, es necesario que la separación entre los dos captadores no sea ni demasiado corta, ni demasiado grande (debe ser a lo sumo igual a 1/10 de la distancia al punto de paso más cercano al vehículo). Esta restricción limita la utilización de este dispositivo a trayectorias y a vehículos específicos, de momento magnético equivalente poco variable.
Diversos sistemas de clasificación de vehículos proponen determinar la velocidad aprovechando la diferencia de tiempo entre dos signaturas medidas por medio de captadores situados a distancias conocidas. Pero para que el decalaje temporal de las signaturas proporcione una buena estimación de su velocidad, es necesario que ésta sea constante sobre la base de cálculo (distancia inter-captadores). Sin embargo, en las condiciones normales de tráfico viario, los vehículos siguen raramente un movimiento uniforme, sobre todo en zonas próximas a los peajes de autopistas, por ejemplo.
La patente EP 0770978 describe un sistema de ese tipo para la detección de vehículos, con varios captadores dispuestos en un suelo o en un techo, situados en tubos dispuestos transversalmente a la trayectoria del vehículo. La distancia entre dos captadores contiguos de un tubo es inferior, o sensiblemente igual, a la anchura normal de un neumático, con el fin de detectar las ruedas emparejadas de los vehículos. Colocando dos tubos de detectores paralelos entre sí, transversales respecto a la dirección longitudinal de la calzada y separados por una distancia conocida, es posible identificar los instantes de detección de un vehículo y calcular el tiempo que ha consumido el vehículo para ir desde un dispositivo hasta el otro. La patente US 4509131 propone utilizar una correlación para efectuar un cálculo comparable, estando el dispositivo situado sobre el vehículo y aprovechando las signaturas magnéticas del suelo.
La patente EP 0841647 A1 describe un dispositivo de medición multipuntos dispuesto transversalmente a la carretera. Éste permite realizar una cartografía del vehículo, en el tiempo y en el espacio. Se utiliza un cálculo de reducción del número de datos para extraer de la cartografía un conjunto de valores característicos de cada vehículo, independientemente de sus dimensiones o de número de ejes. Este dispositivo se utiliza para identificar cada vehículo a efectos de vigilar el tráfico viario. Éste no es un sistema de clasificación. Además, este procedimiento, aunque establece una relación temporal/espacial, no permite obtener una imagen del objeto.
La patente US 5392034 describe un sistema de identificación de vehículos con varios captadores.
Reivindicaciones:
1. Dispositivo de medición de signaturas magnéticas de vehículos, que incluye:
- al menos un primer conjunto de captadores (Cxi), destinados a estar colocados a lo largo de al menos una primera dirección (2),
- al menos un segundo conjunto de captadores (Cyi), destinados a estar colocados según al menos una segunda dirección (4), que corta la primera en un punto en el que está dispuesto un captador común (Cxy0), perteneciente al primer y al segundo conjuntos,
- medios (50) de cálculo, para calcular una relación entre la signatura temporal So(t) de un vehículo que pasa por encima del captador común y un perfil espacial So(x) resultante de las mediciones efectuadas por los captadores del primer conjunto de captadores.
2. Dispositivo según la reivindicación 1, siendo al menos una segunda dirección perpendicular a la primera dirección.
3. Dispositivo según la reivindicación 1 ó 2, que incluye un tercer conjunto de captadores destinados a estar colocados según al menos una tercera dirección, que corta la primera en un punto en el que está dispuesto un captador común (Cxy1), perteneciente al primer y al tercer conjuntos.
4. Dispositivo según una de las reivindicaciones 1 a 3, permitiendo los medios de cálculo, además, calcular la velocidad del vehículo.
5. Dispositivo según una de las reivindicaciones 1 a 4, que incluye una pluralidad de primeros conjuntos de captadores y una pluralidad de segundos conjuntos de captadores que forman una matriz 2D de captadores.
6. Dispositivo según la reivindicación 5, siendo la matriz hueca.
7. Dispositivo según una de las reivindicaciones 1 a 4, que incluye un primer conjunto de captadores, al menos un segundo conjunto de captadores, y al menos una matriz 2D de captadores dispuesta sobre al menos uno de los lados del primer conjunto.
8. Dispositivo según una de las reivindicaciones 1 a 7, que incluye, además, al menos un captador de campo o de gradiente de campo, 1D o 2D o 3D, según la dirección vertical.
9. Dispositivo según una de las reivindicaciones 1 a 8, que incluye además al menos un captador de campo o de gradiente de campo, 1D o 2D o 3D, desviado.
10. Dispositivo según una de las reivindicaciones 1 a 9, permitiendo los medios de cálculo formar una representación espacial de la signatura de los vehículos.
11. Dispositivo según la reivindicación 10, permitiendo los medios de cálculo extraer la citada representación espacial de los parámetros de identificación del vehículo.
12. Dispositivo según la reivindicación 11, permitiendo los medios de cálculo extraer, por acotamiento de la citada representación espacial, la longitud y/o la anchura del vehículo.
13. Dispositivo según la reivindicación 11 ó 12, permitiendo los medios de cálculo extraer, por detección de los máximos de intensidad, el número de ejes del vehículo.
14. Dispositivo según una de las reivindicaciones 11 a 13, permitiendo los medios de cálculo calcular la energía de la signatura y/o al menos una parte de sus coeficientes de Fourier.
15. Dispositivo según una de las reivindicaciones 11 a 14, que incluye además un captador de campo triaxial, permitiendo los medios de cálculo calcular el ángulo recorrido por el vector campo magnético.
16. Dispositivo según una de las reivindicaciones 11 a 15, permitiendo los medios de cálculo calcular la derivada de la signatura P(X,Y) según X.
17. Dispositivo según la reivindicación 16, permitiendo los medios de cálculo calcular un mapa de gradientes.
18. Dispositivo según la reivindicación 16 ó 17, permitiendo los medios de cálculo calcular el gradiente vertical del campo y la relación de este gradiente respecto al campo.
19. Dispositivo según una de las reivindicaciones 11 a 18, siendo los citados parámetros utilizados en un algoritmo de clasificación.
Patentes similares o relacionadas:
SISTEMA DE RECONOCIMIENTO Y CLASIFICACIÓN DE VEHÍCULOS, del 22 de Mayo de 2020, de INFORMATICA EL CORTE INGLES, S.A.: Los sistemas actuales de reconocimiento de vehículos se basan en el reconocimiento de imágenes, lo que supone unos tiempos de procesado muy elevados que no […]
 Procedimiento de clasificación de vehículos en movimiento, del 30 de Octubre de 2019, de JENOPTIK ROBOT GMBH: Procedimiento de clasificación de vehículos , en el que se acotan vehículos al pasar por un cono de radar formado por una radiación […]
Procedimiento de clasificación de vehículos en movimiento, del 30 de Octubre de 2019, de JENOPTIK ROBOT GMBH: Procedimiento de clasificación de vehículos , en el que se acotan vehículos al pasar por un cono de radar formado por una radiación […]
Sistema y procedimiento de clasificación de vehículos, del 17 de Septiembre de 2018, de Global Traffic Technologies LLC: Un procedimiento de clasificación de vehículos, que comprende: generar una forma de onda de señal a partir de una señal en un único bucle inductivo, […]
Sensor de radar integrado en la calzada, del 17 de Mayo de 2017, de VOLTRA solutions GmbH: Dispositivo para el registro de informaciones de tráfico con al menos un dispositivo de sensor dispuesto de modo insertado en la calzada , en el que […]
Dispositivo y procedimiento para la detección de un eje de rueda de un vehículo, del 25 de Enero de 2017, de KAPSCH TRAFFICCOM AG: Dispositivos para la detección de un eje de rueda de un vehículo en marcha sobre una calzada , comprendiendo: una pluralidad de sensores de radar […]
Método y sistema para detección y clasificación de vehículos, del 12 de Mayo de 2016, de ABERTIS AUTOPISTAS ESPAÑA, S.A. (UNIPERSONAL): Método y sistema para detección y clasificación de vehículos. La presente invención se refiere a un método y un sistema de detección […]
 Procedimiento para medir la posición de una superficie de un vehículo, del 19 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Procedimiento para medir la posición (P) de una superficie de un vehículo sobre una calzada , con los pasos:
a) emisión de un primer rayo […]
Procedimiento para medir la posición de una superficie de un vehículo, del 19 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Procedimiento para medir la posición (P) de una superficie de un vehículo sobre una calzada , con los pasos:
a) emisión de un primer rayo […]
 Dispositivo para medir la posición de un vehículo o de una superficie de este, del 19 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Dispositivo para medir la posición (P) de un vehículo o de una superficie de este sobre una calzada , con
al menos un emisor de radar […]
Dispositivo para medir la posición de un vehículo o de una superficie de este, del 19 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Dispositivo para medir la posición (P) de un vehículo o de una superficie de este sobre una calzada , con
al menos un emisor de radar […]