ROBOT CON SISTEMA DE SENSOR PARA DETERMINAR DATOS DE MEDICION TRIDIMENSIONAL.
Sistema de sensor basado en un robot, para determinar datos de medición tridimensional de la superficie de un objeto (12),
que comprende:
un robot (24) con un brazo de robot (22);
un controlador (38) para provocar que dicho brazo (22) del robot se desplace con respecto a la superficie del objeto (12);
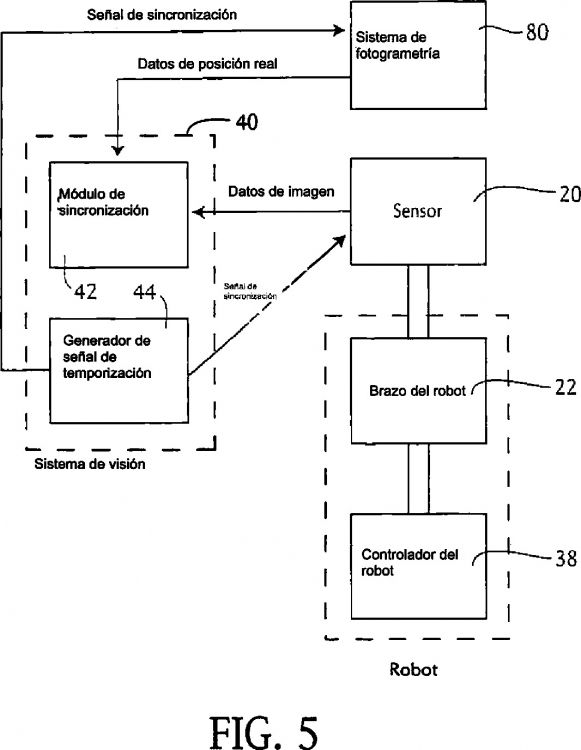
un sensor sin contacto (20) dispuesto sobre dicho brazo (22) del robot para recoger datos de imagen representativos de una parte de la superficie del objeto (12);
un dispositivo (80) indicador de posición para indicar datos de posición representativos de la posición de dicho sensor sin contacto (20);
un generador (44) de señal de temporización para generar periódicamente y transmitir una señal de sincronización, estando dicho dispositivo indicador de posición (80) conectado eléctricamente con dicho generador de señal de temporización (44) y configurado para informar de datos de posición como respuesta a cada una de dichas señales de sincronización, y estando conectado eléctricamente dicho sensor sin contacto (20) con dicho generador de señal de temporización (44) y configurado para recoger datos de imagen como respuesta a cada una de dichas señales de sincronización;
un procesador de datos (40) adaptado para recuperar datos de imagen de dicho sensor sin contacto (20) y datos de posición de dicho dispositivo indicador de posición (80), y siendo operativo para sincronizar los datos de imagen con los datos de posición, generando de esta manera una representación tridimensional del objeto (12);
estando configurado dicho dispositivo indicador de posición (80) en forma de sistema de medición fotogramétrico que emite una descarga de luz casi monocromática, detecta puntos de luz resultantes del reflejo de la descarga de luz desde marcadores retrorreflectantes situados sobre la superficie del sensor sin contacto (20) y detecta la posición de los marcadores
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E00117126.
Solicitante: PERCEPTRON, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 47827 HALYARD DRIVE,PLYMOUTH, MI 48170.
Inventor/es: LONG,WILLIAM D, KINGSTON,CHARLES C.
Fecha de Publicación: .
Fecha Solicitud PCT: 10 de Agosto de 2000.
Fecha Concesión Europea: 14 de Abril de 2010.
Clasificación Internacional de Patentes:
- G01S17/42 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Medida simultánea de la distancia y de otras coordenadas (medida indirecta G01S 17/46).
- G01S17/88 G01S 17/00 […] › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
- G01S17/89 G01S 17/00 […] › para la cartografía o la formación de imágenes.
Clasificación PCT:
- G01B11/25 G01 […] › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
- G01B7/00 G01B […] › Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos.
Clasificación antigua:
- G01B7/00 G01B […] › Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Robot con sistema de sensor para determinar datos de medición tridimensional.
La presente invención se refiere de manera general a sistemas de sensores sin contacto, y más particularmente a un sistema de sensores basado en un robot y un procedimiento para determinar datos de una medición tridimensional de un objeto.
La exigencia de una calidad más elevada ha llevado a los fabricantes de artículos fabricados en masa, tales como vehículos automóviles, a utilizar técnicas de fabricación automatizadas que no eran conocidas cuando se empezó a concebir la fabricación en líneas de montaje. En la actualidad, se utilizan equipos robóticos para montar, soldar, terminar, medir y probar artículos fabricados con un grado mucho más elevado de calidad y precisión de lo que ha sido posible hasta el momento. Las técnicas de fabricación con ayuda de ordenador permiten a los diseñadores conceptualizar gráficamente y diseñar un nuevo producto en una estación de trabajo computerizada y el procedimiento de fabricación automatizado asegura que el diseño se lleva a cabo fielmente y de manera precisa, de acuerdo con la especificación. La visión mediante máquina es una parte clave del entorno de fabricación actual. Se utilizan sistemas de visión por máquina con sistemas robóticos y sistemas de diseño ayudados por ordenador para asegurar que se consigue la calidad al coste práctico más bajo.
En un entorno de fabricación típico pueden existir múltiples sensores sin contacto, tales como sensores ópticos, dispuestos en diferentes lugares predeterminados dentro de la fabricación de la pieza a trabajar, medición o comprobación. A efectos de obtener datos de medición tridimensionales utilizando un sensor bidimensional sin contacto, el sensor tiene que ser desplazado con respecto a la pieza a trabajar. Por lo tanto, es importante saber la situación exacta y la orientación del elemento móvil (tanto el sensor como la pieza a trabajar) cada vez que el sensor obtiene datos de imagen de la pieza a trabajar. Esto tiende a ser bastante simple para dispositivos de movimiento precisos (por ejemplo, un CMM), puesto que la posición indicada refleja la posición real del dispositivo. El controlador de movimiento de un dispositivo de movimiento preciso puede comprender varios factores de compensación que son aplicados al control de movimiento para asegurar que la posición controlada se adapta a la posición real del dispositivo. No obstante, los elevados costes asociados con estos tipos de dispositivos de movimiento son prohibitivos en su utilización en un entorno de fabricación típico.
Como alternativa a estos dispositivos de movimiento más onerosos, es posible utilizar un robot industrial convencional como dispositivo de movimiento en un sistema de medición. Al fijar el sensor sin contacto al robot industrial, el robot puede ser utilizado para desplazar el sensor con respecto a la pieza a trabajar. Los robots industriales son apropiados para llevar a cabo secuencias de movimientos complejas que están adaptadas a la pieza a trabajar. Además, se tiene a disposición muchas herramientas estándar industriales que permiten llevar a cabo la programación de las secuencias de movimiento fuera de la línea ("off line") siendo descargadas a continuación en el controlador del robot.
El problema con un sistema sensor basado en un robot es que el robot industrial convencional no es básicamente un dispositivo con movimiento preciso. Los controladores tipo robot utilizan en general modelos cinemáticos ideales cuando dan instrucciones de movimiento del robot. Las características físicas del brazo del robot varían ligeramente con respecto al modelo ideal y, por lo tato, el movimiento real del brazo del robot varía ligeramente con respecto a la secuencia de movimiento controlada. Además, estas características físicas tienen probabilidades de cambiar al ser sometido el robot al desgaste y cambios térmicos. La mayor parte de controladores por robot no están dotados de medios adicionales para traducir y/o corregir la posición indicada en una posición real del brazo del robot. Como resultado de ello, los robots industriales convencionales no han sido utilizados hasta el momento en sistemas con sensores sin contacto y otras aplicaciones de estaciones de trabajo de fabricación altamente precisas.
El documento WO 97/05449 da a conocer un aparato de exploración que comprende un brazo con múltiples articulaciones con una unidad de control del brazo y una sonda. La unidad de control comprende una unidad de proceso acoplada a un ordenador. El objeto es escaneado para captar datos de una serie de puntos de la superficie del objeto, de manera que el escáner puede captar datos simultáneamente de dos o más puntos. La señal generada es luz estructurada en forma de banda o área procedente de fuentes de iluminación, tales como un diodo láser o bulbos que posibilitan la determinación de datos para la posición y color de la superficie.
Por el documento US-A-4 575 304 se conoce un sistema de robot para reconocer formas tridimensionales, que comprende un sensor de luz de rejilla construido mediante un proyector de luz destinado a proyectar luz para formar una rendija de luz sobre el objeto a manipular y un sensor de imagen para detectar una imagen de la forma ondulada de la sección de luz. El sensor de imagen está montado en un elemento operativo del robot. La luz es escaneada y el sensor de rendija de luz detecta datos de alcance en base a los cuales se detecta la posición, postura, inclinación, etc. del objeto de forma tridimensional, de manera que el robot puede manipular el objeto.
Además, por el documento XP002079443, "Modeling and Calibration of a Structured Light Scanner for 3D Robot Vision", proceedings of the International Conference on Robotics and Automation; Raleigh, 30 Marzo - 3 Abril, 1987, Washington, IEEE COMP. SOC. PRESS, US, Vol. 2, 31 Marzo 1987 (31-03-1987), páginas 807-815 se conoce un escáner de luz estructurada para una visión por robot 3D. El sistema utiliza una matriz de transformación 4x3 que convierte puntos del plano de imagen en sus correspondientes coordenadas 3D. El calibrado del escáner comprende el cálculo del coeficiente de la matriz mostrando el sistema un conjunto de líneas generado por bordes adecuados del objeto. Un objeto trapecial plano conformado de manera tal que no hay dos bordes de la superficie superior paralelos entre sí, es escaneado para obtener un calibrado utilizando diferentes etapas de calibración.
Teniendo en cuenta lo anterior, es un objetivo de la invención dar a conocer un sistema de detección basado en robot para determinar datos de medición tridimensionales para la superficie de un objeto que permite una medición tridimensional muy precisa de un objeto.
Este objetivo es conseguido por un sistema de sensor basado en robot, según la reivindicación 1.
Otras realizaciones son el objeto de las reivindicaciones dependientes.
El sistema de sensor comprende un robot que tiene, como mínimo, un elemento móvil y un controlador del robot para controlar el movimiento del elemento móvil con respecto a la superficie de un objeto. Un sensor sin contacto es acoplado al elemento móvil del robot para captar datos de imagen representativos de la superficie del objeto. Un dispositivo indicador de posición configurado en forma de sistema de medición fotogramétrico es utilizado para indicar datos de medición significativos de la posición del sensor sin contacto. Además, un generador de señal de sincronización es utilizado para generar y transmitir una señal de sincronización para cada uno de los sensores sin contacto y al dispositivo indicador de posición, de manera que el sensor sin contacto indica datos de imagen como respuesta a la señal de sincronización y el dispositivo de indicación de posición indica datos de posición como respuesta a la señal de sincronización.
El sistema sensor comprende además un sistema de visión adaptado para recoger datos de imagen del sensor sin contacto y datos de posición del dispositivo indicador de posición. Al escanear el sensor sin contacto la superficie del objeto, existe una latencia de tiempo entre el momento en el que el sensor genera su láser hasta el momento en el que los datos de imagen procesados son disponibles para el sistema de visión. En otras palabras, los datos de imagen indicados por el sensor tienen un retraso de tiempo por detrás de los datos de posición indicados por el dispositivo indicador de posición. Por lo tanto, el sistema de visión debe ser capaz de sincronizar los datos de imagen con los datos de posición. Se utiliza un almacenamiento de memoria para almacenar...
Reivindicaciones:
1. Sistema de sensor basado en un robot, para determinar datos de medición tridimensional de la superficie de un objeto (12), que comprende:
un robot (24) con un brazo de robot (22);
un controlador (38) para provocar que dicho brazo (22) del robot se desplace con respecto a la superficie del objeto (12);
un sensor sin contacto (20) dispuesto sobre dicho brazo (22) del robot para recoger datos de imagen representativos de una parte de la superficie del objeto (12);
un dispositivo (80) indicador de posición para indicar datos de posición representativos de la posición de dicho sensor sin contacto (20);
un generador (44) de señal de temporización para generar periódicamente y transmitir una señal de sincronización, estando dicho dispositivo indicador de posición (80) conectado eléctricamente con dicho generador de señal de temporización (44) y configurado para informar de datos de posición como respuesta a cada una de dichas señales de sincronización, y estando conectado eléctricamente dicho sensor sin contacto (20) con dicho generador de señal de temporización (44) y configurado para recoger datos de imagen como respuesta a cada una de dichas señales de sincronización;
un procesador de datos (40) adaptado para recuperar datos de imagen de dicho sensor sin contacto (20) y datos de posición de dicho dispositivo indicador de posición (80), y siendo operativo para sincronizar los datos de imagen con los datos de posición, generando de esta manera una representación tridimensional del objeto (12);
estando configurado dicho dispositivo indicador de posición (80) en forma de sistema de medición fotogramétrico que emite una descarga de luz casi monocromática, detecta puntos de luz resultantes del reflejo de la descarga de luz desde marcadores retrorreflectantes situados sobre la superficie del sensor sin contacto (20) y detecta la posición de los marcadores.
2. Sistema sensor basado en un robot, según la reivindicación 1, en el que dicho brazo (22) del robot explora la superficie del objeto (12), de manera que los datos de imagen indicados por dicho sensor sin contacto (20) tienen un retardo de tiempo por detrás de los datos de posición indicados por dicho dispositivo (80) indicador de posición.
3. Sistema sensor basado en un robot, según la reivindicación 1 ó 2, que comprende además un espacio de almacenamiento en memoria (62, 64, 66) para almacenar datos de posición desde dicho dispositivo (80) indicador de posición, estando dicho procesador de datos (40) conectado a dicho espacio de almacenamiento en memoria (62, 64, 66) para sincronizar los datos de imagen con los datos de posición correspondientes.
4. Sistema sensor basado en un robot, según cualquiera de las reivindicaciones 1 a 3, en el que dicho sensor sin contacto (20) es un sensor de luz estructural bidimensional (20).
5. Sistema sensor basado en un robot, según cualquiera de las reivindicaciones 1 a 4, en el que dicho sensor sin contacto (20) emite luz estructurada en una configuración plana predefinida y teniendo un receptor óptico para recibir luz reflejada emitida por dicho sensor sin contacto (20), de manera que la luz reflejada es indicativa de la superficie del objeto (12).
6. Sistema sensor basado en un robot, según cualquiera de las reivindicaciones 1 a 5, en el que:
dicho controlador está configurado como controlador (38) del robot para controlar los movimientos de dicho brazo (22) del robot; estando conectado dicho generador de señal de temporización (44) eléctricamente con dicho controlador (38) del robot para generar y transmitir periódicamente dicha señal de sincronización, indicando dicho controlador (38) del robot un conjunto de dichos datos de posición como respuesta a cada una de dichas señales de sincronización, generando de esta manera una serie de conjuntos de datos de posición;
siendo dicho sensor sin contacto (20) sensible a cada una de dichas señales de sincronización para la captación de un conjunto de datos de imagen representativos de una parte de dicho objetivo (12), generando de esta manera una correspondiente pluralidad de conjuntos de datos de imagen representativos de una pluralidad de partes del objeto (12); y
estando configurado dicho procesador de datos como sistema de visión (40) adaptado para recuperar dicha serie de datos de imagen de dicho sensor sin contacto (20) y sincronizar cada conjunto de datos de imagen con un correspondiente conjunto de datos de posición, generando de esta manera una representación tridimensional del objeto (12).
7. Sistema sensor basado en un robot, según la reivindicación 6, que comprende además un sistema de transformación de coordenadas para transformar cada conjunto de datos de posición en un marco de referencia del sensor, de manera que el marco de referencia del sensor está asociado con dicho sensor sin contacto (20).
8. Sistema sensor basado en un robot, según la reivindicación 6 ó 7, en el que dicho controlador (38) del robot está configurado para indicar datos de posición representativos de la posición de dicho brazo (22) del robot.
9. Sistema sensor basado en un robot, según la reivindicación 6 ó 7, en el que dicho sistema (80) de medición fotogramétrica tiene un campo de observación de calibración y es posicionable en un punto de ventaja, de manera que dicho sensor sin contacto (20) se encuentra dentro del campo de calibración, y en el que dicho sistema de medición fotogramétrico (80) se conecta eléctricamente a dicho generador de señal de temporización (44) e indica un conjunto de datos de posición como respuesta a cada una de dichas señales de sincronización, generando de esta manera una serie de conjuntos de datos de posición.
Patentes similares o relacionadas:
CARRIL PARA VEHÍCULOS PESADOS CON MEDIOS DE COMPROBACIÓN DE VEHÍCULO VACÍO, del 18 de Junio de 2020, de INFORMATICA EL CORTE INGLES, S.A.: 1. Carril para vehículos pesados con medios de comprobación de vehículo vacío, caracterizado porque está constituido a partir de un carril para paso de vehículos […]
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Dispositivo para controlar un relleno de separación, vehículo que comprende dicho dispositivo y método de control asociado, del 29 de Abril de 2020, de ALSTOM Transport Technologies: Un dispositivo para controlar un relleno de separación con el que se va a equipar una puerta de un vehículo ferroviario , dicho dispositivo de control comprende: […]
Procedimiento y sistema para evitar mal funcionamiento en llamadas, del 21 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento para evitar errores de operación en llamadas por un teléfono móvil, mediante el cual el procedimiento comprende las etapas de: detectar continuamente […]
Método y aparato para la formación de imágenes fantasma computacional, del 24 de Julio de 2019, de BAE SYSTEMS PLC: Un aparato de formación de imágenes fantasma computacional que comprende una primera fuente de radiación electromagnética y un sistema […]
Procedimiento de adquisición de las coordenadas de un punto de activación de un proyectil y control de disparo que implementa un tal procedimiento, del 20 de Diciembre de 2017, de NEXTER SYSTEMS: Procedimiento de adquisición de las coordenadas de un punto de activación (P) de un proyectil o de una ráfaga de proyectiles en trayectoria y […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]
Técnicas para posicionar un vehículo, del 8 de Noviembre de 2017, de KONECRANES GLOBAL CORPORATION: Un sistema para determinar una ubicación (x_v, y_v) de un vehículo en un entorno provisto de una pluralidad de puntos de referencia (11, 11') cuya […]