PROCEDIDMIENTO Y SISTEMA PARA LA MEDICION DE LA FORMA DE UNA SUPERFICIE REFLEJANTE.
- Procedimiento para la medición de la forma de una superficie reflejante (14),
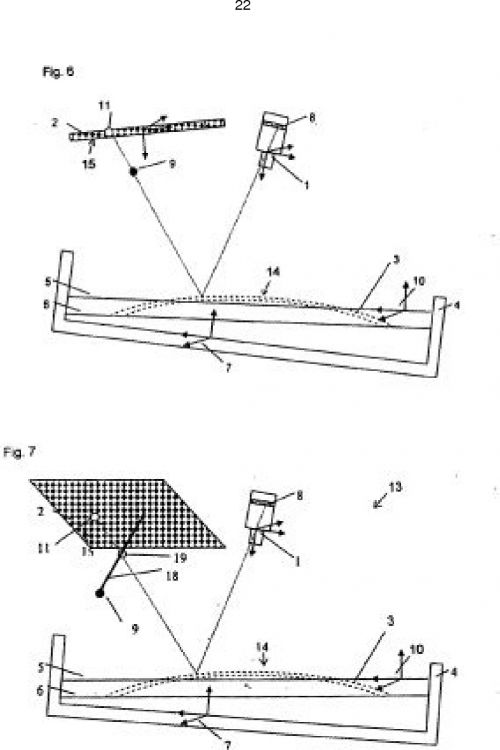
con un sistema que presenta al menos un dibujo (15) para la reflexión en la superficie reflejante (14) y al menos una cámara (1) para la observación píxel por píxel del dibujo (15) reflejado en la superficie (14), siendo conocidas la posición y la orientación de la cámara (1) y del dibujo (15), así como la dirección visual para cada píxel (8) de la cámara (1), determinándose a partir de las direcciones visuales conocidas para los píxeles (8) de la cámara (1) y las posiciones del dibujo (15) que corresponden a la reproducción del dibujo (15) reflejado en los píxeles (8) de la cámara (1) el ángulo de la superficie y la altura de la superficie para la medición de la forma, disponiéndose un objeto (18) de forma lineal delante del dibujo para la determinación exacta de la altura de la superficie de un punto de apoyo, de modo que al menos un punto (19) del objeto (18) oculte un punto del dibujo (11), siendo conocida la posición del objeto (18) en el espacio, determinándose a continuación un plano a partir de la dirección visual conocida del píxel que reproduce el punto de dibujo (11) y el punto del dibujo (11) y determinándose el punto (19) como punto de intersección del objeto (18) con este plano, además de determinarse el punto de apoyo como punto de intersección entre la dirección visual conocida del píxel que reproduce el punto del dibujo (11) y la recta que pasa por el punto del dibujo (11) y el punto (19)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/001999.
Solicitante: ISRA SURFACE VISION GMBH.
Nacionalidad solicitante: Alemania.
Dirección: ALBERT-EINSTEIN-ALLEE 36-40 45699 HERTEN ALEMANIA.
Inventor/es: WIENAND,STEPHAN, RUDERT,ARMIN.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Marzo de 2007.
Fecha Concesión Europea: 21 de Julio de 2010.
Clasificación Internacional de Patentes:
- G01B11/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
Clasificación PCT:
- G01B11/25 G01B 11/00 […] › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
Fragmento de la descripción:
La invención se refiere a un procedimiento para la medición de la forma de una superficie reflejante, en el que está previsto al menos un dibujo para la reflexión en una superficie reflejante y al menos una cámara para la observación píxel por píxel del dibujo reflejado en la superficie siendo conocidas la posición y la orientación de la cámara y del dibujo.
Para la medición de la forma de superficies reflejantes son conocidos los procedimientos de este tipo, en los que un dibujo de forma y posición conocidas se refleja en una superficie reflejante, observándose y evaluándose la imagen reflejada con una cámara. Por ejemplo el documento DE 197 57 106 A1 describe un dispositivo para la medición automatizada de la forma de superficies reflejantes esféricas o también asféricas. Para ello, en el lado opuesto de la superficie a medir se coloca un dibujo iluminado, que dispersa de forma difusa, captándose mediante una cámara electrónica la imagen del dibujo que se genera mediante la superficie reflejante. El dibujo se elige de tal forma que en el sensor de imagen de la cámara se genera una imagen de bandas aproximadamente rectas y equidistantes, que mediante una transformada de Fourier discreta pueden evaluarse con una exactitud especialmente elevada. Para poder medir la superficie en cualquier dirección en el espacio, el sistema de bandas que se genera en el sensor de imagen debe presentar bandas orientadas ortogonalmente unas respecto a otras.
Por el documento DE 103 45 586 A1 se conocen un procedimiento y un dispositivo para determinar la estructura de una superficie, en el que un generador de imagen genera un dibujo plano reflejándose el mismo en la superficie. El dibujo reflejado es reproducido por un captador de imagen y es evaluado posteriormente por un dispositivo de control. Para conseguir una medición planiforme simple, económica, así como rápida de la superficie del objeto, el generador de imagen genera sucesivamente elemento de imagen por elemento de imagen varios dibujos planos con estructuras planas, presentando las estructuras de dos dibujos dimensiones diferentes y los distintos elementos de imagen de dos dibujos una posición definida, respectivamente. Puesto que en este procedimiento ya no pueden captarse bandas finas de un dibujo de bandas, para el dibujo de bandas se usan bandas relativamente anchas, que presentan una distribución sinusoidal de la luminosidad. Estos dibujos se generan en monitores TFT.
El documento DE 101 27 304 A1 describe un procedimiento y un dispositivo para determinar un contorno tridimensional de una superficie reflejante de un objeto, en el que una reflexión de una trama conocida se reproduce en la superficie del objeto mediante un sistema reproductor en un receptor evaluándose la imagen generada. Para ello se propone usar una trama conocida desde al menos dos distancias diferentes de la superficie reflejante, debiendo conocerse la posición relativa entre las tramas y el receptor en el espacio.
En todos estos planteamientos se parte de que la posición y la orientación del sistema de
medición se han determinado previamente mediante un procedimiento de calibrado adecuado siendo, por lo tanto, conocidas. Esta puede realizarse perfectamente para superficies pequeñas a medir. No obstante, cuando se pretende medir superficies más grandes con una exactitud suficiente y la rapidez requerida en los procesos modernos de producción, por lo general es necesario usar varias cámaras, que preferiblemente deben encontrarse en el interior del dibujo. Para medir superficies grandes, el dibujo que se refleja en la superficie reflejante debe presentar un tamaño suficiente. Puesto que el dibujo debe ser, además, variable, el dibujo se proyecta en muchos casos en forma de una imagen en un cristal mate. No obstante, en el caso de superficies grandes se necesita mucho espacio para ello, que en muchos casos no está disponible. Además, se usan pantallas planas para la generación del dibujo, usándose para la generación de dibujos de superficies grandes en muchos casos varias pantallas, que deben calibrarse en procedimientos de calibrado complicados para cada una de las cámaras usadas. Al usar varias pantallas y cámaras debe encontrarse, además, un método con el que puede realizarse la transición de una cámara a la siguiente o a la siguiente pantalla.
M. Petz et al.: “Reflection Grating Photogrammetry: A Technique for Absolute Shape Measurement of Specular Free-Form Surfaces” en PROCEEDINGS OF SPIE-INTERNATIONAL SOCIETY FOR OPTICAL ENGINEERING, OPTICAL MANUFACTURING AND TESTING VI 2005, tomo 5869, páginas 1 a 12, describe distintos planteamientos para determinar la forma de una superficie reflejante con ayuda de un dibujo de referencia. Entre ellos se encuentra la reconstrucción de una superficie reflejante de este tipo partiendo del ángulo de la superficie, para lo cual debe conocerse la posición exacta de un punto de apoyo en la superficie reflejante. La posición de este punto de apoyo puede determinarse mediante métodos trigonométricos.
Al usar sólo un dibujo a una distancia determinada de la superficie, así como de usar sólo una cámara, la forma de la superficie reflejante tampoco puede determinarse definitivamente con los procedimientos convencionales, porque resulta una ambigüedad entre el ángulo de la superficie y la distancia de la superficie o la altura de la superficie, que no puede resolverse sin información adicional. Este problema se resuelve con los procedimientos conocidos (véase por ejemplo el documento DE 101 27 304 A1) porque se usan varias cámaras o porque están dispuestos varios dibujos a distintas distancias de la superficie. No obstante, esto tiene el inconveniente de conllevar elevados costes para los equipos, puesto que cada zona de la superficie a medir debe ser cubierta por varios dibujos y/o cámaras.
Por lo tanto, el objetivo de la presente invención es proponer una posibilidad con la que se permita con unos costes reducidos de equipos una medición de la forma fiable de superficies reflejantes, en particular también de objetos transparentes, debiendo poderse manejar la medición de la forma de un modo especialmente sencillo.
La solución del objetivo arriba expuesto se indica en la reivindicación 1. En particular, se propone que para la medición de la forma se determinen el ángulo de la superficie y la altura de la superficie a partir de las direcciones visuales conocidas píxel por píxel de la cámara y las posiciones del dibujo que corresponden a la reproducción del dibujo reflejado en los píxeles de la cámara. En el marco de esta invención, la superficie reflejante no sólo es una superficie completamente reflejante, sino en particular también una superficie parcialmente transparente o una hoja de cristal. Por lo tanto, la invención en su conjunto también es especialmente adecuada para la medición de lunas delanteras para vehículos. Gracias a que se conoce preferiblemente la dirección visual para cada píxel de la cámara, a partir de la posición de la zona de dibujo reflejada en este píxel puede determinarse la posición de dibujo correspondiente con una elevada resolución local y con unos medios ópticos sencillos, de modo que también es posible una medición rápida y exacta de la superficie. Además, la medición de la superficie también puede realizarse si la cámara se encuentra en el foco de superficies curvadas de forma esférica.
La dirección visual de cada píxel de la cámara puede conocerse aquí, en particular, gracias a un calibrado previo o posterior de un sistema para la medición de la forma.
Según una realización preferible del procedimiento propuesto, para el análisis del dibujo captado por la cámara, que presenta por ejemplo una secuencia de dibujos de al menos dos componentes de dibujo distinguibles, que se presentan periódicamente, se usa un procedimiento de evaluación de fase, un procedimiento codificado en el tiempo y/o un procedimiento codificado en frecuencia. Preferiblemente, la secuencia de dibujos puede presentar dos intensidades de luz distintas. Se ha mostrado que mediante este procedimiento puede conseguirse una resolución local especialmente elevada. Por lo tanto, también es excelente para determinar la posición del punto de dibujo reproducido en el píxel en el dibujo. Un procedimiento codificado en el tiempo y/o codificado en frecuencia puede prever por ejemplo, que se representen distintos dibujos de forma sucesiva en el tiempo y/o durante intervalos de tiempo diferentes en los soportes de los dibujos siendo captados por las cámaras. Puesto que el tipo de los dibujos es conocido, en una evaluación posterior...
Reivindicaciones:
1. Procedimiento para la medición de la forma de una superficie reflejante (14), con un sistema que presenta al menos un dibujo (15) para la reflexión en la superficie reflejante (14) y al menos una cámara (1) para la observación píxel por píxel del dibujo (15) reflejado en la superficie (14), siendo conocidas la posición y la orientación de la cámara (1) y del dibujo (15), así como la dirección visual para cada píxel (8) de la cámara (1), determinándose a partir de las direcciones visuales conocidas para los píxeles (8) de la cámara (1) y las posiciones del dibujo (15) que corresponden a la reproducción del dibujo (15) reflejado en los píxeles (8) de la cámara (1) el ángulo de la superficie y la altura de la superficie para la medición de la forma, disponiéndose un objeto (18) de forma lineal delante del dibujo para la determinación exacta de la altura de la superficie de un punto de apoyo, de modo que al menos un punto (19) del objeto (18) oculte un punto del dibujo (11), siendo conocida la posición del objeto (18) en el espacio, determinándose a continuación un plano a partir de la dirección visual conocida del píxel que reproduce el punto de dibujo (11) y el punto del dibujo (11) y determinándose el punto (19) como punto de intersección del objeto (18) con este plano, además de determinarse el punto de apoyo como punto de intersección entre la dirección visual conocida del píxel que reproduce el punto del dibujo (11) y la recta que pasa por el punto del dibujo (11) y el punto (19).
2. Procedimiento según la reivindicación 1, en el que para el análisis del dibujo (15) captado por la cámara (1) se usan un procedimiento de evaluación de fase, un procedimiento codificado en el tiempo y/o un procedimiento codificado en frecuencia.
3. Procedimiento según una de las reivindicaciones anteriores, en el que, después de la determinación de la altura de la superficie para el punto de apoyo en la superficie reflejante (14), se estima la altura de la superficie en un punto de la superficie adyacente al punto de apoyo determinándose a partir de ello el ángulo de la superficie.
4. Procedimiento según una de las reivindicaciones anteriores, en el que varios puntos de apoyo se ponen en una trama en la superficie (14) a medir.
5. Procedimiento según una de las reivindicaciones anteriores, en el que el dibujo (15) se afina sucesivamente comenzando con un dibujo (15) basto.
6. Procedimiento según una de las reivindicaciones anteriores, en el que se representan distintas estructuras de dibujos.
7. Procedimiento según una de las reivindicaciones anteriores, en el que la medición se realiza en objetos transparentes.
8. Procedimiento según la reivindicación 7, en el que en una primera etapa del procedimiento se mide la superficie dispuesta arriba y/o las zonas de la superficie en las que pueden separarse las reflexiones múltiples de las distintas superficies y en el que en una segunda etapa del procedimiento se evalúan las reflexiones múltiples.
9. Procedimiento según la reivindicación 7 u 8, en el que en una primera etapa de procedimiento se usa una forma y posición previamente conocidas de la superficie calculándose como se representa el dibujo conocido en reflexiones múltiples y en el que en una segunda etapa del procedimiento se evalúan las reflexiones múltiples.
10. Procedimiento según una de las reivindicaciones anteriores, en el que la forma del dibujo (15) depende de la resolución.
Patentes similares o relacionadas:
Dispositivo y procedimiento para la detección sin contacto de estructuras de tejido rojas, así como disposición para desprender una banda de estructuras de tejido rojas, del 22 de Julio de 2020, de NORDISCHER MASCHINENBAU RUD. BAADER GMBH + CO KG: Dispositivo para la detección sin contacto de estructuras de tejido rojas en productos de carcasas de animales sacrificados, que comprende un equipo […]
Imagen detallada de video de la geometría de vía, del 17 de Junio de 2020, de VolkerRail Nederland BV: Tren de medición con un sistema óptico que cuenta con medios para realizar un registro de imágenes con una cámara y una lámpara, por ejemplo, imágenes detalladas de […]
Método y dispositivo de medida de planicidad de un producto metálico, del 3 de Junio de 2020, de Primetals Technologies Austria GmbH: Metodo de medida de planicidad de un producto metalico, en forma o bien de una banda o bien de una placa de una linea de tratamiento metalurgico, dicho producto […]
Transmisión de máscara espacial afín e invariante para la detección de profundidad activa, del 6 de Mayo de 2020, de QUALCOMM INCORPORATED: Un procedimiento operativo en un dispositivo transmisor para proyectar una máscara de código compuesta , que comprende: obtener […]
Sistema para la detección óptica de objetos, del 6 de Mayo de 2020, de Phenospex B.V: Sistema para la detección óptica de objetos, por medio de triangulación láser con una fuente para la generación de luz de una primera longitud de onda, donde […]
Sistema y método para la medición tridimensional de la forma de objetos materiales, del 15 de Abril de 2020, de Artec Europe S.a.r.l: Un sistema para la medición 3D de la forma de un objeto material , que comprende: un proyector de luz para proyectar un patrón de luz estructurado sobre […]
Equipo y procedimiento para la fabricación de piezas de prótesis dental, del 18 de Marzo de 2020, de INSTITUT STRAUMANN AG: Equipos de captación de superficies y equipos de generación de superficies, con equipos para la detección parcial o totalmente automática de bordes de preparaciones […]
Dispositivo y método para la medición óptica tridimensional de objetos fuertemente reflectantes o transparentes, del 22 de Enero de 2020, de Aimess GmbH: Dispositivo para la medición tridimensional de un objeto, que comprende: una primera instalación de proyección con una primera fuente de luz infrarroja (1a) para […]