METODO Y SISTEMA DE GUIADO PARA GUIAR UN MISIL.
Método para guiar un misil (3) disparado por un operador (10) desde un cañón (2) de un arma (1) contra un objetivo (9),
soportando el cañón (2) una mira (4), en la que la velocidad angular del objetivo (9) es determinada en función del seguimiento de la trayectoria (9) por parte del operador (10) en un primer período de tiempo antes del disparo del misil (3) durante el que se registran, por lo menos, una primera posición angular y una segunda posición angular del objetivo (9) así como el intervalo de tiempo entre éstas, y en el que, en función de la velocidad angular determinada, se predice la posición angular que se supone tiene el objetivo (9) cuando el misil (3) alcanza el objetivo (9), y el misil (3) es guiado de manera continua en una trayectoria predicha, deseada, hacia la posición angular supuesta, en función del tiempo y de la velocidad del misil, caracterizado porque el operador (10), en un segundo periodo de tiempo posterior al disparo del misil (3), sigue la posición real del misil (3) en relación con la posición angular predicha del objetivo (9), por medio de la mira (4) soportada por el cañón (2), de modo que, si es observada una desviación, puede ser transmitida una orden de corrección al misil (3) para corregir la trayectoria predicha para el misil (3)
Tipo: Resumen de patente/invención. Número de Solicitud: W0001557SE.
Solicitante: SAAB BOFORS DYNAMICS AB.
Nacionalidad solicitante: Suecia.
Dirección: 691 80 KARLSKOGA.
Inventor/es: REGEBRO, CHRISTER.
Fecha de Publicación: .
Fecha Concesión Europea: 7 de Octubre de 2009.
Clasificación Internacional de Patentes:
- F41G7/30B
Clasificación PCT:
- F41G3/14 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › F41G 3/00 Aparatos de puntería (dispositivos de mira F41G 1/00; determinación de la dirección, la distancia o la velocidad mediante ondas de radio u otras ondas G01S; computadores G06; antenas H01Q). › Dispositivos de tiro indirecto.
- F41G7/00 F41G […] › Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06).
- F41G7/24 F41G […] › F41G 7/00 Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06). › Sistemas de guiado por medio de haces de radar que siguen el blanco (balizas de haces de barrido cónico a este efecto G01S 1/42).
- F41G7/34 F41G 7/00 […] › basados sobre datos de posiciones predeterminadas del blanco.
Clasificación antigua:
- F41G3/14 F41G 3/00 […] › Dispositivos de tiro indirecto.
- F41G7/00 F41G […] › Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06).
- F41G7/24 F41G 7/00 […] › Sistemas de guiado por medio de haces de radar que siguen el blanco (balizas de haces de barrido cónico a este efecto G01S 1/42).
- F41G7/34 F41G 7/00 […] › basados sobre datos de posiciones predeterminadas del blanco.
Fragmento de la descripción:
Método y sistema de guiado para guiar un misil.
La presente invención trata de un método para guiar un misil disparado desde el cañón de un arma contra un objetivo por un operador, soportando el cañón una mira, en la que se determina la velocidad angular del objetivo en función del seguimiento del objetivo realizado por el operador en un primer periodo de tiempo previo al disparo del misil, durante el cual se registra, por lo menos, una primera posición angular y una segunda posición angular del objetivo así como el intervalo de tiempo entre éstas, y en el que, en función de la velocidad angular determinada, se predice la posición angular que se supone tendrá el objetivo cuando el misil le alcance, y el misil es guiado de manera continua en una trayectoria deseada, predicha, hacia la posición angular supuesta en función del tiempo y de la velocidad del misil. La invención también trata de un sistema de guiado para guiar un misil contenido en el cañón de un arma y que soporta una mira, que comprende medios para determinar la velocidad angular del objetivo en un primer periodo de tiempo antes del disparo del misil cuando un operador está realizando un seguimiento del objetivo, en función de la grabación de una primera posición angular y una segunda posición angular y del intervalo de tiempo entre estas, medios para predecir la posición del objetivo cuando se espera que el misil alcance el objetivo en función de la velocidad angular determinada, y medios para predecir la trayectoria deseada. En este texto, se entiende que el término misil cubre todas las formas de objetos guiados de forma interna y/o externa que son disparados contra un objetivo. Un ejemplo de un tipo de misil adecuado es un misil antitanque.
La forma tradicional de posicionar la carga útil de un arma portátil antitanque es dispararla en una trayectoria balística hacia el objetivo. Los problemas que surgen al hacer esto comprenden:
- - Variaciones causadas por el operador en el ajuste de la mira y en el disparo.
- - Dificultades en la determinación de la distancia y la velocidad del objetivo.
- - Condiciones atmosféricas desconocidas o difíciles.
- - Dispersión balística.
- - Cambios en los movimientos del objetivo.
Algunas de las dificultades anteriores son más importantes cuando es necesario disparar desde espacios cerrados. La baja velocidad en la boca reduce considerablemente el alcance máximo del arma. Un arma moderna con exigencias de un alcance máximo mayor debe, de alguna manera, superar las dificultades indicadas anteriormente. Se necesita alguna forma de guiado del misil disparado, durante su desplazamiento hasta el objetivo.
Previamente se ha propuesto, para distancias medias, utilizar un método de guiado conocido por el término de Línea de visión predicha (PLOS, Predicted Line of Sight). PLOS es un sistema totalmente del tipo "disparar y olvidarse". Antes de disparar, el operador estima la velocidad angular a la que la línea de visión está girando en la mira hacia un objetivo en movimiento. La velocidad angular es medida por el giroscopio de velocidad del misil y por un dispositivo de estimación. En función de la velocidad angular estimada, se predice la posición del objetivo como una función del tiempo posterior al disparo, y el misil es guiado hacia la posición predicha del objetivo. Al mismo tiempo, se elimina el efecto de la atracción terrestre. Sin embargo, hay un cierto número de fuentes de error que limitan el método de guiado PLOS y que significan que la posición predicha del objetivo no siempre coincide con la posición real del objetivo. Los errores del tipo de los listados a continuación pueden provocar que el misil se desvíe respecto del punto de impacto deseado o que sobrevuelen el punto.
- - Error al ajustar la mira tras el lanzamiento contra un objetivo,
- - error en la estimación de la velocidad angular de la línea de visión,
- - error debido a haber supuesto la velocidad angular como constante,
- - error en el bucle de control del misil,
- - error provocado por la estimación incorrecta de perturbaciones procedentes del entorno, como son el viento, etc.,
- - error provocado por deficiencias en el misil y en los sensores.
La desviación de la trayectoria se incrementa normalmente con la duración del vuelo y la velocidad del objetivo. La dirección del movimiento del objetivo es otro factor que influye mucho en la desviación de la trayectoria.
Por lo tanto, frente al escenario anterior existe la necesidad de incrementar la precisión del impacto a distancias mayores que, en este contexto, pueden ser distancias del orden de 300 a 1.000 metros, por ejemplo.
A este respecto, podría indicarse que existen sistemas y métodos de guiado conocidos "per se" que admiten que la trayectoria de un misil sea corregida tras el disparo, véase, entre otros, los documentos US-A-4 008 869, US-A-3 233 847, US-A-5 102 064, y US-A-3 974 948. Todos estos ejemplos tienen en común que la mira está separada de la parte de lanzamiento del misil, lo que requiere en un procesamiento de señal diferente y más complejo.
Del documento GB-A-2 060 091 se conoce un ejemplo de un sistema de guiado que mide la velocidad angular antes del lanzamiento. En este sistema de guiado no hay corrección del proyectil tras el lanzamiento.
El objetivo de la presente invención es mejorar la precisión del impacto para los métodos de guiado basados en PLOS. El objetivo de la invención se alcanza mediante un método caracterizado porque el operador, en un periodo de tiempo posterior al disparo del misil, lleva a cabo un seguimiento de la posición real del misil en relación con la posición angular predicha del objetivo, por medio de la mira soportada por el cañón, de manera que si se observa una desviación, puede transmitirse al misil una orden de corrección con el objeto de corregir la trayectoria prevista para el misil, y además un sistema de guiado que está caracterizado porque se dispone una conexión de comunicaciones para transmitir cualesquiera órdenes de corrección desde el operador hasta el misil en un segundo periodo de tiempo posterior al disparo del misil, para la corrección de la trayectoria prevista para el misil en función de observaciones del operador por medio de la mira soportada por el cañón.
En principio, según la invención, el misil es conducido de modo autónomo una vez que ha sido disparado. No es necesario que el misil sea alimentado de manera continua desde la mira con posiciones de error. El disparo está precedido por una fase en la que se determina la velocidad del objetivo en función del seguimiento del objetivo por el operador, en el periodo de tiempo entre una primera posición angular y una segunda posición angular. El seguimiento puede llevarse a cabo de forma óptica, por ejemplo utilizando luz visible o luz IR (infrarroja).
Dado que el operador tiene la posibilidad de llevar a cabo un seguimiento continuo del misil hasta el objetivo y actuar sobre la trayectoria del misil, si el operador considera que el misil no se encuentra dentro de una distancia aceptable desde la línea de visión puede introducir una corrección que desplaza el misil hacia la línea de visión. La posibilidad de que el operador siga y corrija el recorrido del misil, significa que los errores de la lista anterior pueden ser compensados, por lo menos, parcialmente. La introducción de la corrección durante el desplazamiento del misil hacia el objetivo incrementa las ocasiones de disparar a mayores distancias y de atacar objetivos rápidos y/o maniobrados.
Debe observarse que si el objetivo es estacionario, el operador puede disparar el misil directamente contra el objetivo. De nuevo en este caso, este tiene la posibilidad de corregir desviaciones en las trayectorias del misil.
Según una realización ventajosa del método, la trayectoria del misil es corregida durante el segundo periodo de tiempo por escalones en el sentido contrario a la desviación observada tras la recepción de una orden de corrección activada por el operador. En relación con esto, una realización ventajosa está caracterizada porque la corrección de la trayectoria del misil durante el segundo período de tiempo en el sentido contrario a la desviación observada, se lleva a...
Reivindicaciones:
1. Método para guiar un misil (3) disparado por un operador (10) desde un cañón (2) de un arma (1) contra un objetivo (9), soportando el cañón (2) una mira (4), en la que la velocidad angular del objetivo (9) es determinada en función del seguimiento de la trayectoria (9) por parte del operador (10) en un primer período de tiempo antes del disparo del misil (3) durante el que se registran, por lo menos, una primera posición angular y una segunda posición angular del objetivo (9) así como el intervalo de tiempo entre éstas, y en el que, en función de la velocidad angular determinada, se predice la posición angular que se supone tiene el objetivo (9) cuando el misil (3) alcanza el objetivo (9), y el misil (3) es guiado de manera continua en una trayectoria predicha, deseada, hacia la posición angular supuesta, en función del tiempo y de la velocidad del misil, caracterizado porque el operador (10), en un segundo periodo de tiempo posterior al disparo del misil (3), sigue la posición real del misil (3) en relación con la posición angular predicha del objetivo (9), por medio de la mira (4) soportada por el cañón (2), de modo que, si es observada una desviación, puede ser transmitida una orden de corrección al misil (3) para corregir la trayectoria predicha para el misil (3).
2. Método, según la reivindicación 1, caracterizado porque, en el segundo periodo de tiempo, la trayectoria del misil (3) es corregida por escalones, en el sentido contrario a la desviación observada, tras la recepción de una orden de corrección activado por el operador.
3. Método, según la reivindicación 2, caracterizado porque la corrección de la trayectoria del misil (3) en el segundo período de tiempo, en el sentido contrario a la desviación observada, se lleva a cabo en uno o dos escalones.
4. Método, según cualquiera de las reivindicaciones precedentes, caracterizado porque la velocidad angular del objetivo, estimada en el primer periodo de tiempo, es corregida en el segundo periodo de tiempo, siendo corregida la trayectoria del misil (3) en proporción a la distancia de disparo, lo que tiene como resultado una corrección por escalones, en el sentido contrario a la desviación observada, tras la recepción de una orden de corrección activada por el operador (10).
5. Método, según cualquiera de las reivindicaciones precedentes, caracterizado porque la corrección de la trayectoria del misil (3), basada en órdenes enviadas por el operador (10), se lleva a cabo para distancias de objetivo mayores que 300 metros.
6. Sistema de guiado para guiar un misil disparado por un operador (10) desde un cañón (2) de un arma (1) contra un objetivo (9) y que consta de un cañón (2) del arma (1) soportando una mira (4), que comprende medios para determinar (24, 25) la velocidad angular del objetivo (9) en un primer periodo de tiempo antes del disparo del misil (3) cuando un operador (10) hace un seguimiento del misil, en función del registro de una primera posición angular y de una segunda posición angular y del intervalo de tiempo entre éstas, medios para predecir (21) la posición del objetivo (9) cuando se espera que el misil (3) alcance el objetivo (9), en función de la velocidad angular determinada, y medios para predecir (21) la trayectoria deseada, caracterizado porque se dispone una conexión (17, 19) de comunicaciones para transmitir cualesquiera órdenes de corrección desde el operador (10) hasta el misil (3) en un segundo periodo de tiempo posterior al disparo del misil (3) para la corrección de la trayectoria predicha para el misil (3) en función de las observaciones del operador (10) por medio de la mira (4) soportada por el cañón (2).
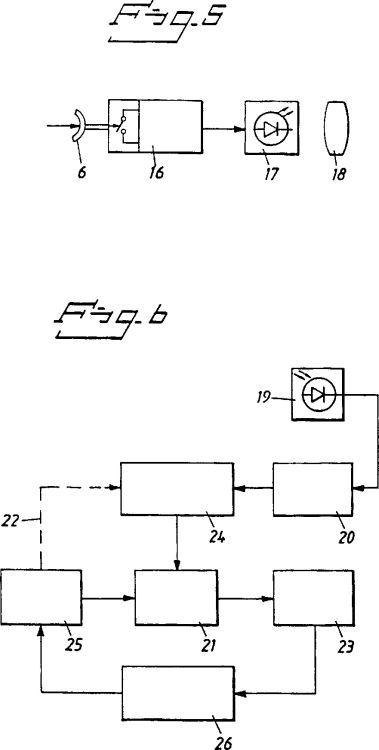
7. Sistema de guiado, según la reivindicación 6, caracterizado porque la conexión (17, 19) de comunicaciones en el lado de transmisión está conectada al mecanismo de disparo del misil mediante un descodificador (16) que, en función de órdenes de corrección en forma de pulsaciones del mecanismo (6) de disparo, identifica las órdenes de corrección y, a través de un transmisor (17), envía la información al misil (3).
8. Sistema de guiado, según la reivindicación 6, caracterizado porque la conexión (17, 19) de comunicaciones en el lado de recepción, situada en el misil (3), consiste en un receptor (20) para recibir las órdenes de corrección procedentes del operador y en una unidad informática (21) conectada al receptor.
9. Sistema de guiado, según la reivindicación 8, caracterizado porque la unidad informática (21) está dispuesta para utilizar algoritmos comunes de control con el fin de guiar el misil en la trayectoria deseada, predicha, a través de un dispositivo de control (23) incorporado en el misil, preferentemente con propulsión por gas caliente a través de válvulas o con superficies aerodinámicas de control, en función de órdenes de corrección recibidas y de información procedente de los sensores de inercia del misil.
10. Sistema de guiado, según cualquiera de las reivindicaciones precedentes 6 a 9, caracterizado porque la conexión (17, 19) de comunicaciones funciona con luz láser.
Patentes similares o relacionadas:
Procedimiento y dispositivo para estabilizar localmente un punto de radiación en un objeto diana distante, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Un procedimiento para estabilizar localmente un punto de radiación (S) en un objeto diana distante (Z), donde el punto de radiación (S) se forma […]
Procedimiento y dispositivo para estabilizar localmente un punto de radiación en un objeto diana distante, del 15 de Abril de 2020, de MBDA Deutschland GmbH: Un procedimiento para estabilizar localmente un punto de radiación (S) en un objeto diana distante (Z), donde el punto de radiación (S) se forma a partir de un haz láser […]
Procedimiento para localizar y combatir amenazas, en especial en situaciones de amenaza asimétricas, del 4 de Diciembre de 2019, de ThyssenKrupp Marine Systems GmbH: Procedimiento para localizar amenazas mediante el uso de un sistema, en donde el sistema es un sistema para localizar amenazas a un buque, en […]
Método y montaje para posicionar y alinear un disruptor para desmantelar un objetivo, del 4 de Diciembre de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento de posicionamiento y de alineación de un disruptor destinado al desmantelamiento de un objetivo y que comprende un eje de tiro, una dirección de tiro […]
Procedimiento y sistema de detección de un tren de impulsos electromagnéticos, dispositivo de guiado electromagnético de una munición hacia un objetivo que comprende un tal sistema de detección, del 29 de Mayo de 2019, de THALES: Procedimiento de detección de un tren de impulsos electromagnéticos emitidos según una ley de incidencia predefinida en un escenario de observación por […]
Método de control de tiro para defensa antiaérea basada en armas de fuego, del 27 de Marzo de 2019, de BAE SYSTEMS BOFORS AB: Método de control de tiro de armas contra blancos aéreos cuando se dirigen hacia un objeto de protección, en el que se conoce la posición […]
Conjunto de sensores ópticos, del 11 de Marzo de 2019, de HENSOLDT Sensors GmbH: Conjunto de sensores ópticos que comprende varios sensores (D1, D2) para la detección de ondas electromagnéticas y una abertura común asignada a los sensores (D1, D2), previéndose […]
Dispositivo de control remoto de un designador de blancos a partir de un módulo de ataque, módulo de ataque y designador que implementa tal dispositivo, del 13 de Noviembre de 2018, de NEXTER MUNITIONS: Dispositivo de control remoto, a partir de un módulo de ataque que actúa en sobrevuelo de un objetivo, módulo de tipo proyectil, subproyectil, […]