ESCANEADO OPTICO DE UN PERFIL.
Un método de determinación de un perfil de una superficie (11) de un objeto (12),
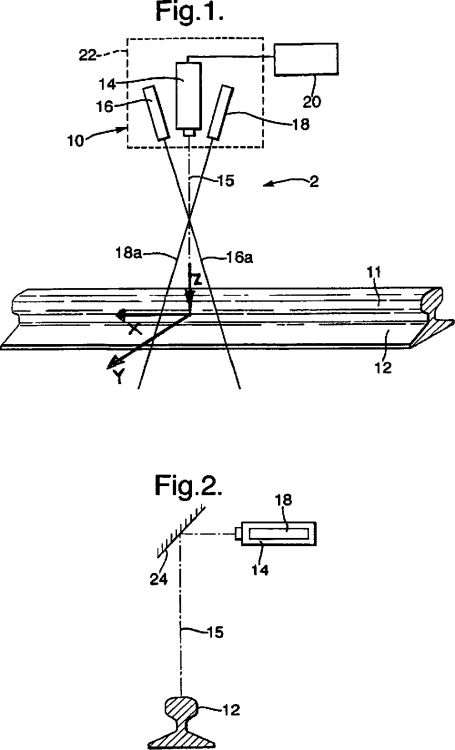
teniendo el objeto un eje longitudinal y siendo el perfil perpendicular al eje longitudinal, comprendiendo el método las etapas de la disposición de una cámara (14) para ver una poción de la superficie (11) con sus ejes de visualización (15) substancialmente perpendiculares al eje longitudinal (X) del objeto (12), y la disposición de dos fuentes de haces luminosos (16, 18), para definir los planos de iluminación (16a, 18a), en donde los planos de iluminación se cruzan con la mencionada porción de la superficie, para definir dos líneas sobre la superficie, operando la cámara (14) para producir una imagen de la porción de la superficie, incluyendo las imágenes de las dos líneas, caracterizado porque se determina la separación longitudinal de las dos líneas en la imagen en una multiplicidad de posiciones a lo largo de las líneas a través del objeto (12), y determinando (20) a partir de las mismas el perfil de la superficie del objeto (12)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2007/050448.
Solicitante: DELTARAIL GROUP LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: HUDSON HOUSE 2 HUDSON WAY,PRIDE PARK DERBY DERBYSHIRE DE.
Inventor/es: PATKO,SANDOR,MATYAS, ASPREY,PETER DANIEL.
Fecha de Publicación: .
Fecha Concesión Europea: 23 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- B61K9/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61K EQUIPOS AUXILIARES ESPECIALMENTE ADAPTADOS PARA FERROCARRILES, NO PREVISTOS EN OTRO LUGAR (frenos acumuladores de la energía B61H; protección de la vía contra los agentes atmosféricos E01B; limpieza de raíles, quitanieves E01H). › B61K 9/00 Gálibos de perfiles de vehículos ferroviarios; Detección o indicación de calentamiento excesivo de órganos; Dispositivos sobre las locomotoras o los vagones que indican las secciones defectuosas de la vía; Características generales de vehículos de auscultación de la vía. › Instalaciones de medida para vigilar la vía (aplicación de aparatos o dispositivos de medida para trabajos de colocación de la vía E01B 35/00; técnicas de medida G01).
- E01B35/06 CONSTRUCCIONES FIJAS. › E01 CONSTRUCCION DE CARRETERAS, VIAS FERREAS O PUENTES. › E01B VIAS FERREAS; HERRAMIENTAS PARA VIAS FERREAS; MAQUINAS PARA LA CONSTRUCCION DE VIAS FERREAS DE CUALQUIER TIPO (dispositivos descarriladores o para situar los vehículos en la vía, frenos de vía o dispositivos ralentizadores B61K; retirada de materia indeseable de las vías de ferrocarril, control de la vegetación, applicación de líquidos E01H). › E01B 35/00 Aplicaciones de los aparatos o dispositivos de medida para la construcción de vías (aparatos para locomotoras o vagones para indicar o registrar secciones de vía en mal estado B61K 9/00; medida de ángulos, de dimensiones lineales o de irregularidades en general G01B, G01C). › para medir las irregularidades en el sentido longitudinal.
- G01B11/25D
Clasificación PCT:
- B61K9/08 B61K 9/00 […] › Instalaciones de medida para vigilar la vía (aplicación de aparatos o dispositivos de medida para trabajos de colocación de la vía E01B 35/00; técnicas de medida G01).
- E01B35/06 E01B 35/00 […] › para medir las irregularidades en el sentido longitudinal.
- G01B11/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
Fragmento de la descripción:
Escaneado óptico de un perfil.
Esta invención está relacionada con un método óptico para determinar un perfil de una superficie, y/o un escáner de perfiles que opera de acuerdo con este método.
Los escáneres ópticos de perfiles tales como los escáneres de perfiles por láser son unos instrumentos conocidos. Comprenden una fuente luminosa tal como un láser que está dispuesto para escanear a través de un ángulo para definir un plano de iluminación, y una cámara dispuesta para visualizar la forma de la línea de iluminación sobre un objeto, tal como una rueda de un tren de ferrocarril. A partir de la forma de la línea visualizada por la cámara, podrá determinarse la forma del objeto. Hasta ahora la calibración de tales dispositivos requería información sobre los emplazamientos de la fuente luminosa y la cámara. El método conocido estándar de operación es disponer la fuente luminosa de forma que el plano incidente sea perpendicular al eje longitudinal del objeto; la cámara está dispuesta con su eje de visualización en un ángulo grande (por ejemplo en el rango de 45º a 70º) con el plano incidente. Tales instrumentos pueden proporcionar unas medidas precisas de la forma de la sección transversal de los objetos tales como los raíles y las barras de acero, pero si esta técnica se utiliza para monitorizar la forma de objetos metálicos que sean brillantes entonces existirán dos problemas potenciales; en primer lugar, existe el riesgo de la luz solar se refleje hacia la cámara; en segundo lugar, la cantidad de luz dispersada hacia la cámara por una superficie brillante es una proporción pequeña de la luz incidente, y en consecuencia la técnica requiere una fuente luminosa de alta potencia y una cámara sensible, y se precisa de un blindaje por la seguridad de cualquier persona que pueda estar presente en las proximidades.
El documento US 2006/144129A describe un sistema para la medida del desplazamiento relativo de la vía férrea, en donde el sistema comprende:
un vehículo para raíles que tiene un cuerpo y un conjunto de ruedas, en donde al menos una de las ruedas del conjunto de ruedas está acoplada al raíl en un punto de contacto en una rueda y en el raíl;
al menos un emisor óptico montado en el vehículo, en donde el emisor óptico está configurado para emitir un haz detectable sobre la superficie subyacente del raíl a una distancia a lo largo del raíl separada de al menos de uno de los puntos de contacto de la rueda y el raíl; y
una cámara montada en el vehículo para grabar el haz sobre la superficie del raíl subyacente conforme el vehículo se desplaza a lo largo del raíl para determinar el desplazamiento relativo vertical del raíl.
El documento DE 29921143 reivindica y describe un aparato de medida longitudinal que comprende un generador de rayos y unos medios para determinar la distancia de un objeto desde la reflectancia de la luz procedente del objeto, en donde se proyectan dos haces luminosos paralelos en el objeto y en donde una cámara graba las imágenes de la luz reflejada desde el objeto, en donde la distancia entre las imágenes de los dos haces luminosos se utiliza para determinar la distancia entre el aparato y el objeto. Los haces luminosos pueden tener la forma de rayos o haces planos.
El documento US 4325639A reivindica y expone un método para medir distancias y para determinar el contorno tridimensional de una pieza de trabajo la proyección de dos haces luminosos de distintas longitudes de onda sobre la pieza de trabajo, pivotando los haces en sus plano común, pivotando el plano común alrededor de un eje que sea común con el mencionado plano, midiendo los ángulos de inclinación de los puntos luminosos generados por los haces sobre la superficie de la pieza de trabajo en las distintas longitudes de onda, determinando la posición de la imagen de cada punto luminoso, y calculando las distancias y el contorno, utilizando los ángulos de inclinación y las posiciones de las imágenes.
De acuerdo con la presente invención, se proporciona un método de determinación de un perfil de una superficie de un objeto, teniendo un eje longitudinal y un perfil que es perpendicular al eje longitudinal, comprendiendo el método las etapas de disponer una cámara para visualizar una porción de la superficie con su eje de visualización substancialmente perpendicular al eje longitudinal del objeto, y disponiendo dos fuentes de haces luminosos para definir los planos de iluminación, en donde los planos de iluminación se cruzan con la mencionada porción de la superficie, para definir dos líneas sobre la superficie, operando la cámara para producir una imagen de la porción de la superficie, incluyendo las imágenes de dos líneas, caracterizado porque se determina la separación longitudinal de las dos líneas en la imagen en una multiplicidad de posiciones a lo largo de las líneas a través del objeto, y determinando el perfil de la superficie del objeto.
Preferiblemente, las fuentes de los haces luminosos están dispuestas cerca de la cámara, más preferiblemente con la cámara entre los mismos. Preferiblemente, las fuente de los haces luminosos y la cámara están suficientemente cerca conjuntamente para que los ángulos entre las líneas rectas desde una posición sobre la superficie hasta las fuentes de los haces luminosos y la cámara sean inferiores a 40º, y más preferible inferior a 30º. Esto tiene la ventaja de que las fuentes de los haces luminosos y la cámara pueden fijarse conjuntamente y tratándose como una sola unidad. Una ventaja adicional es que la cámara está visualizando la luz dispersada en una dirección próxima a la luz reflejada, la cual es algo más intensa que la luz dispersada en ángulos grandes, de forma que esta disposición realza la intensidad de la imagen.
En un modo de operación, los planos de iluminación son paralelos con respecto al eje de visualización de la cámara. En este caso, las dos líneas sobre la superficie son paralelas, pero su separación en la imagen en distintas posiciones a lo largo de las mismas varía debido a cualquier variación en la distancia desde la cámara (debido al perfil de la superficie), y por ello la separación entre puntos a lo largo de las líneas en la imagen puede estar relacionada con el perfil de la superficie. No obstante, esto no proporciona un método de medida sensible.
En un modo preferido de operación, los planos de iluminación están inclinados entre sí. Esto posibilita la obtención de una sensibilidad considerablemente mayor, en donde la separación de las líneas en la imagen varían mucho más significativamente con la distancia desde la cámara, y por tanto con el perfil. Los planos de iluminación pueden disponerse para estar insertados entre la cámara y la superficie, o más allá de la superficie.
La presente invención proporciona también un escáner de perfiles para determinar el perfil de la superficie de un objeto, teniendo el objeto un eje longitudinal, y en donde el escáner de perfiles comprende una cámara que está dispuesta durante la operación para visualizar una porción de la superficie con su eje de visualización substancialmente perpendicular al eje longitudinal del objeto, y dos fuentes de haces luminosos que están dispuestas para definir los planos de iluminación, en donde los planos de iluminación se cruzan con la mencionada porción de la superficie, para definir dos líneas sobre la superficie, de forma que durante la operación la cámara pueda generar una imagen de la porción de la superficie que incluya las imágenes de las dos línea, y comprendiendo además los medios adaptados para determinar el perfil de la superficie del objeto desde la separación de las dos líneas en la imagen en una multiplicidad de posiciones a lo largo de las dos líneas.
Preferiblemente, las fuentes de los haces luminosos están dispuestas cerca de la cámara, más preferiblemente montadas conjuntamente como una unidad. Pueden estar encerradas dentro de un armazón común provisto con una abertura o ventana.
En esta memoria técnica, el término "eje longitudinal" no debe considerarse como que implica que el objeto es de una sección transversal exactamente uniforme: si así fuera, dicha única medida de su perfil sería suficiente. El eje longitudinal es en su lugar un eje que se extiende en la dirección de la longitud del objeto. El método de la presente invención es particularmente adecuado para las medidas en los objetos que no varían de forma rápida en su perfil transversal, tal como se observará en donde el perfil que se deduce es un promedio a través de la distancia entre las líneas...
Reivindicaciones:
1. Un método de determinación de un perfil de una superficie (11) de un objeto (12), teniendo el objeto un eje longitudinal y siendo el perfil perpendicular al eje longitudinal, comprendiendo el método las etapas de la disposición de una cámara (14) para ver una poción de la superficie (11) con sus ejes de visualización (15) substancialmente perpendiculares al eje longitudinal (X) del objeto (12), y la disposición de dos fuentes de haces luminosos (16, 18), para definir los planos de iluminación (16a, 18a), en donde los planos de iluminación se cruzan con la mencionada porción de la superficie, para definir dos líneas sobre la superficie, operando la cámara (14) para producir una imagen de la porción de la superficie, incluyendo las imágenes de las dos líneas, caracterizado porque se determina la separación longitudinal de las dos líneas en la imagen en una multiplicidad de posiciones a lo largo de las líneas a través del objeto (12), y determinando (20) a partir de las mismas el perfil de la superficie del objeto (12).
2. Un método según la reivindicación 1, en donde las fuentes de los haces luminosos (16, 18) están dispuestas cerca de la cámara (14) con la cámara situada entre las mismas.
3. Un método según la reivindicación 1 ó reivindicación 2, en donde las fuentes (16, 18) de los haces luminosos y la cámara (14) están suficientemente juntas para que los ángulos entre las líneas rectas desde una posición en la superficie hasta las fuentes de los haces luminosos y hacia la cámara sean inferiores a 40º, y más preferiblemente inferiores a 30º.
4. Un método según cualquiera de las reivindicaciones anteriores, en donde los planos (16a, 18a) de iluminación son cada uno paralelos a los ejes de visualización (15) de la cámara (14).
5. Un método según cualquiera de las reivindicaciones 1 a 3, en donde los planos de iluminación (16a, 18a) están inclinados entre sí.
6. Un método según la reivindicación 5, en donde los planos de iluminación (16a, 18a) están dispuestos para cruzarse entre la cámara (14) y la superficie (11).
7. Un escáner de perfiles (10) para determinar el perfil de una superficie de un objeto (12), teniendo el objeto un eje longitudinal (X), y el donde el escáner de perfiles comprende una cámara (14) la cual está dispuesta en operación para visualizar una porción de la superficie (11) con su eje de visualización (15) substancialmente perpendicular al eje longitudinal (X) del objeto (12), y dos fuentes de haces luminosos (16, 18) que están dispuestas para definir unos planos de iluminación (16a, 18a), en donde los planos de iluminación se cruzan con la mencionada porción de la superficie (11), para definir dos líneas sobre la superficie, de forma que en operación la cámara produzca una imagen de la porción de la superficie que incluya las imágenes de las dos líneas, caracterizado porque tiene unos medios (20) adaptados para determinar el perfil de la superficie del objeto (12) a partir de la separación de las dos líneas en la imagen en una multiplicidad de posiciones a lo largo de las dos líneas.
8. Un escáner de perfiles según la reivindicación 7, en donde las fuentes (16, 18) de los haces luminosos están dispuestas cerca de la cámara (14), y estando montadas conjuntamente como una unidad (10).
9. Un escáner de perfiles según la reivindicación 8, en donde las fuentes de los haces luminosos (16, 18) y la cámara (14) están encerradas dentro de un armazón común (22).
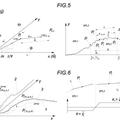
10. Un escáner de perfiles según cualquiera de las reivindicaciones 7 a 9, que incorpora unos medios de reflexión (24) para asegurar que la cámara visualiza el objeto a lo largo de un eje de visualización común.
Patentes similares o relacionadas:
Aparato autopropulsado para medir parámetros estructurales y/o geométricos de un conmutador y/o vía férrea, del 1 de Julio de 2020, de General Impianti S.r.l: Un aparato autopropulsado para medir parámetros estructurales y/o geométricos de un conmutador y/o vía férrea, comprendiendo el aparato un vagón motorizado […]
Imagen detallada de video de la geometría de vía, del 17 de Junio de 2020, de VolkerRail Nederland BV: Tren de medición con un sistema óptico que cuenta con medios para realizar un registro de imágenes con una cámara y una lámpara, por ejemplo, imágenes detalladas de […]
Procedimiento para determinar una posición de referencia de una vía, del 3 de Junio de 2020, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Procedimiento para determinar una posición de referencia de una vía definida por un punto fijo posicionado junto a una vía con la ayuda de un […]
Dispositivo y procedimiento para detectar el entorno de vehículo de un vehículo ferroviario y vehículo ferroviario, del 22 de Enero de 2020, de BOMBARDIER TRANSPORTATION GMBH: Dispositivo para detectar el entorno de vehículo de un vehículo ferroviario , en donde el dispositivo comprende al menos un primer equipo de detección de imágenes, en […]
Procedimiento y sistema de medición para la detección de un punto fijo junto a una vía, del 1 de Enero de 2020, de Plasser & Theurer Export von Bahnbaumaschinen GmbH: Procedimiento para la determinación de la posición real de una vía con respecto a un punto fijo posicionado en un entorno lateral de la vía por medio […]
 Procedimiento y dispositivo para medir y calcular una vía de ferrocarril, del 25 de Diciembre de 2019, de HP3 Real GmbH: Procedimiento para medir y calcular el asiento de una vía férrea mediante un carro medidor de la vía (A), que puede rodar sobre la vía, con por lo menos […]
Procedimiento y dispositivo para medir y calcular una vía de ferrocarril, del 25 de Diciembre de 2019, de HP3 Real GmbH: Procedimiento para medir y calcular el asiento de una vía férrea mediante un carro medidor de la vía (A), que puede rodar sobre la vía, con por lo menos […]
Dispositivo y procedimiento para determinar como mínimo una propiedad de una vía para un vehículo ferroviario, así como un vehículo ferroviario, del 27 de Noviembre de 2019, de BOMBARDIER TRANSPORTATION GMBH: Dispositivo para determinar como mínimo una propiedad de una vía para un vehículo ferroviario , en donde el dispositivo (1, 1a, 1b) comprende […]
 Método para determinar la temperatura neutra de piezas de trabajo alargadas, del 25 de Septiembre de 2019, de Goldschmidt Thermit GmbH: Método para calcular la temperatura neutra o el estado libre de tensión de un tramo de carril , en donde el tramo de carril está sometido a tensión longitudinal […]
Método para determinar la temperatura neutra de piezas de trabajo alargadas, del 25 de Septiembre de 2019, de Goldschmidt Thermit GmbH: Método para calcular la temperatura neutra o el estado libre de tensión de un tramo de carril , en donde el tramo de carril está sometido a tensión longitudinal […]