PROCEDIMIENTO PARA EL EQUILIBRADO DE UNA RUEDA DE UN VEHICULO.
Procedimiento para el equilibrado de una rueda de un vehículo,
en el que
en una prueba de medición se miden en una rueda de vehículo que rota las fuerzas resultantes de un desequilibrio en la rueda,
a partir de las fuerzas medidas para una compensación de desequilibrio dinámica en dos planos de compensación perpendiculares al eje del rotor, y para una compensación de desequilibrio estática en un plano de compensación en la rueda del vehículo se calculan masas de compensación de desequilibrio disponibles en escalones de masa prefijados en determinadas posiciones de ángulo de giro alrededor del eje de la rueda, en el que
en el cálculo de la masa de compensación de desequilibrio correspondiente la desviación de masa permitida de la masa de compensación de desequilibrio exacta correspondiente a las fuerzas medidas para la compensación de desequilibrio es mayor que la desviación de masa permitida para la compensación estática de desequilibrio y
se fija un peso de compensación que se corresponde con la masa de compensación de desequilibrio calculada en la posición angular asignada y en el plano de compensación asignado en la rueda del vehículo
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07014810.
Solicitante: SNAP-ON EQUIPMENT SRL A UNICO SOCIO..
Nacionalidad solicitante: Italia.
Dirección: VIA PROVINCIALE PER CARPI, 33,42015 CORREGGIO (REGGIO EMILIA.
Inventor/es: BRAGHIROLI, FRANCESCO.
Fecha de Publicación: .
Fecha Solicitud PCT: 27 de Julio de 2007.
Fecha Concesión Europea: 21 de Abril de 2010.
Clasificación Internacional de Patentes:
- G01M1/22D
Clasificación PCT:
- G01M1/22 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 1/00 Ensayo del equilibrado estático o dinámico de máquinas o estructuras. › y convirtiendo las vibraciones debidas al desequilibrio en variables eléctricas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento para el equilibrado de una rueda de un vehículo.
La invención se refiere a un procedimiento para el equilibrado de una rueda de un vehículo.
Del documento US 4.854.168 se conoce medir, en una prueba de medición en la rueda del vehículo que está rotando, las fuerzas que resultan a partir de un desequilibrio de la rueda. A partir de las fuerzas medidas se calculan para una rodadura de desequilibrio en dos planos de compensación perpendiculares al eje del rotor en la rueda el vehículo en escalones de masa prefijados, por ejemplo, de 5 g, masas de compensación de desequilibrios disponibles en posiciones de ángulos de giro asignadas. Además, a partir de ello se determina un vector de desequilibrio estático por medio de adición de vector. La compensación del desequilibrio en los dos planos de compensación se realiza de tal manera que se minimiza el desequilibrio residual estático. Gracias a ello se evitan oscilaciones que se ponen de manifiesto al conducir el automóvil como agitaciones en la conducción y que resultan fundamentalmente del desequilibrio residual estático. En la mayor parte de los casos se usan para la compensación del desequilibrio pesos en un número y tamaño tal que no es necesario en la práctica para una calidad suficiente de la compensación del desequilibrio.
El objetivo de la invención es crear un procedimiento del tipo mencionado al comienzo en el que se consiga una compensación de desequilibrio en la rueda del vehículo con una calidad suficiente para la marcha.
Este objetivo se consigue por medio de las características de la reivindicación 1, indicándose en las reivindicaciones subordinadas variantes ventajosas de la invención.
En la invención se miden en una prueba de medición en la rueda del vehículo que está rotando las fuerzas resultantes a partir de un desequilibrio en la rueda. A partir de las fuerzas medidas se calculan para una compensación de desequilibrio dinámica en dos planos de compensación perpendiculares al eje de la rueda, y además para una compensación de desequilibrio estática en un plano de compensación en la rueda del vehículo masas de compensación de desequilibrio correspondientes disponibles en escalones de masa prefijados correspondientemente en las posiciones de ángulo de giro asignadas alrededor del eje de la rueda. De modo convencional, las masas de compensación de desequilibrio pueden estar disponibles en escalones de masa de 5 g o en un múltiplo de 5 g.
En el cálculo de la masa de compensación de desequilibrio correspondiente, la desviación de masa permitida (tolerancia) de la masa de compensación de desequilibrio que se corresponde exactamente con las fuerzas medidas es mayor para la compensación del desequilibrio dinámica que la desviación de masa permitida (tolerancia) para la compensación estática del desequilibrio. La masa de compensación de desequilibrio calculada de modo correspondiente se fija como peso de compensación en la posición angular asignada y en el plano de compensación asignado en la rueda del vehículo.
La desviación de masa para la compensación de desequilibrio dinámica puede ser al menos el doble de grande que la desviación de masa para la compensación de desequilibrio estática. Por ejemplo, la desviación de masa para la compensación de desequilibrio estática puede tener un valor de 5 g, y la desviación de masa para la compensación de desequilibrio dinámica puede tener un valor, por ejemplo, de 10 g a 30 g. La medición de la desviación de masa se puede realizar dependiendo del tipo de vehículo. Por ejemplo, para los denominados vehículos SUV o caravanas y similares, la desviación de masa puede tener un valor que sea 1,5 veces la desviación de masa permitida para turismos y motocicletas. Para vehículos industriales ligeros, la desviación de masa puede tener un valor aproximadamente el doble de la desviación de masa permitida para turismos y motocicletas.
Cuando en el cálculo de la masa de compensación de desequilibrio resulta que las masas de compensación de desequilibrios calculadas para la compensación de desequilibrio dinámica se encuentran dentro de la tolerancia asignada, el dispositivo de cálculo (ordenador) conmuta preferentemente de modo automático al cálculo de la masa de compensación de desequilibrio y del ángulo de giro asignado para la compensación de desequilibrio estática. En este cálculo se considera preferentemente que la rueda del vehículo también se equilibre dentro de la tolerancia prefijada para la compensación de desequilibrio dinámica.
Cuando la rueda del vehículo se equilibra de modo dinámico, esta compensación del desequilibrio se realiza de tal manera que también la compensación de desequilibrio estática se realiza dentro de la tolerancia prefijada para ello.
Se prescinde de una compensación de desequilibrio cuando tanto las masas de compensación de desequilibrio calculadas para la compensación de desequilibrio dinámico como las masas de compensación de desequilibrio calculadas para la compensación de desequilibrio estática se encuentran dentro de las tolerancias prefijadas. En este caso, por medio de una modificación paso a paso de las posiciones angulares de las masas de compensación de desequilibrio correspondientes tanto para la compensación de desequilibrio dinámica como para la compensación de desequilibrio estática se pueden determinar las masas de compensación resultantes, y para la compensación de desequilibrio que se ha de llevar a cabo se usan las masas de compensación de desequilibrio calculadas que se encuentran dentro de las tolerancias predeterminadas para la compensación de desequilibrio dinámica y estática, y en las que la suma de las masas de compensación es la menor posible. Los pesos de compensación de desequilibrio correspondientes se fijan entonces a las posiciones angulares de giro asignadas determinadas en el cálculo en la rueda del vehículo en los planos de compensación correspondientes.
Además del ahorro de los pesos de compensación de desequilibrio, con la invención también se puede conseguir una reducción del tiempo de prueba de medición. En este caso, en la prueba de medición se realizan al menos dos revoluciones con el número de revoluciones por unidad de tiempo de medición, calculándose las masas de compensación de desequilibrio correspondientes y las posiciones de ángulo de giro asignadas. La prueba de medición se para cuando las masas de compensación de desequilibrio calculadas en las revoluciones posteriores están dentro de las tolerancias prefijadas. En este caso, a partir de las masas de compensación de desequilibrio calculadas en las revoluciones correspondientes se calcula el valor medio resultante. En cuanto que estos valores medios también estén en el siguiente giro dentro de las tolerancias prefijadas se interrumpe la prueba de medición.
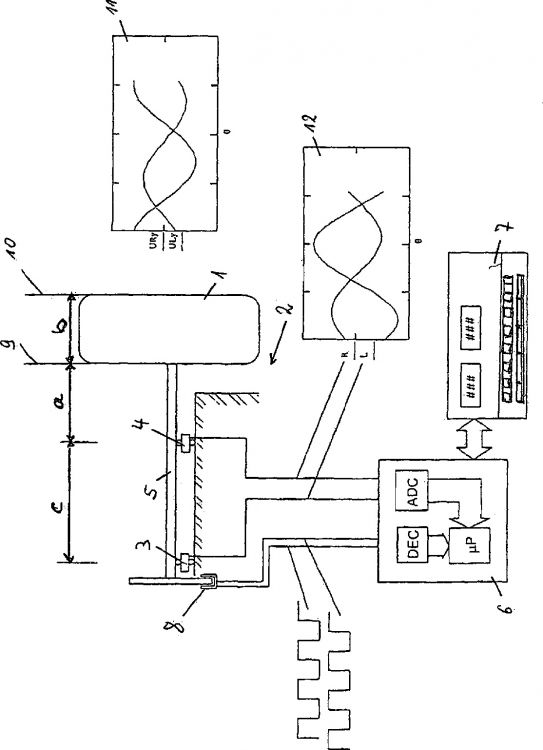
A partir de la figura se explica la invención con más detalle.
En la figura está representada esquemáticamente una disposición de medición de una máquina de equilibrado de ruedas 2. La disposición de medición contiene transductores 3, 4 que están apoyados en un árbol de medición 5 de la máquina de equilibrado de ruedas 2. En el árbol de medición 5 está fijada de modo centrado de modo conocido una rueda de vehículo 1, en particular una rueda de automóvil. Con el árbol de medición 5 está unido un sensor de ángulo 8, que registra el ángulo de giro correspondiente de la rueda del vehículo 1, y conduce una señal eléctrica correspondiente que contiene los incrementos angulares correspondientes a un dispositivo de evaluación 6. Las señales eléctricas de oscilación de fuerzas L y R en forma sinusoidal generadas por los transductores 3 y 4, que son entregadas por el transductor izquierdo 3 y por el transductor derecho 4 están representadas en la representación 12 en la Fig. 4 referidas al ángulo de giro
Las señales del ángulo de giro del sensor de ángulo 8 son conducidas en el dispositivo de evaluación 6 a través de un decodificador DEC al dispositivo de cálculo electrónico µP. Las señales de oscilación de fuerza L y R de los transductores 3 y 4 son conducidas a través de un codificador analógico/digital ADC al ordenador electrónico µP en el dispositivo de evaluación 6. Además, los datos geométricos del dispositivo de medición y de la rueda del vehículo 1 que se ha de equilibrar se introducen en el dispositivo de cálculo µP electrónico. En este caso se trata de la distancia b respecto...
Reivindicaciones:
1. Procedimiento para el equilibrado de una rueda de un vehículo, en el que
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que la desviación de masa para la compensación de desequilibrio dinámica es al menos el doble de grande que la desviación de masa para la compensación de desequilibrio estática.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado por el hecho de que la desviación de masa se corresponde con el escalón de masa más inferior que está disponible para la compensación de desequilibrio, o con un múltiplo de éste.
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado por el hecho de que cuando las masas de compensación de desequilibrio calculadas están dentro de la tolerancia para la compensación del desequilibrio se conmuta automáticamente a la compensación del desequilibrio estática.
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado por el hecho de que en la compensación de desequilibrio estática se realiza al mismo tiempo un equilibrado dinámico dentro de la tolerancia prefijada para ello.
6. Procedimiento según una de las reivindicaciones 1 a 4, caracterizada porque en la compensación de desequilibrio dinámica se realiza al mismo tiempo una compensación de desequilibrio estática dentro de la tolerancia fijada para ello.
7. Procedimiento según la reivindicación 5, caracterizado por el hecho de que en el cálculo de la masa de compensación de desequilibrio para la compensación de desequilibrio estática se escoge el plano de compensación en el que está la mayor masa de compensación de desequilibrio calculada y se modifica paso a paso la posición del ángulo de giro para la masa de compensación hasta que se alcanzan o se queda por debajo de las tolerancias prefijadas para la compensación de desequilibrio dinámica y estática.
8. Procedimiento según la reivindicación 6, caracterizado por el hecho de que en el cálculo de las masas de compensación de desequilibrio para la compensación de desequilibrio dinámica, las posiciones angulares para la compensación de desequilibrio se modifican en los dos planos de compensación con un cálculo simultáneo de la masa de compensación de desequilibrio estática a partir de las masas de compensación de desequilibrio dinámicas que se producen y las masas de compensación de desequilibrio determinadas con ello se usan en las posiciones angulares para la compensación de desequilibrio dinámica, en las que la suma de las masas de compensación de desequilibrio es mínima.
9. Procedimiento según una de las reivindicaciones 1 a 8, caracterizado por el hecho de que la prueba de medición se para cuando las masas de compensación de desequilibrio calculadas a partir de los resultados de medición de al menos dos giros de rueda consecutivos se encuentran dentro de las tolerancias prefijadas.
10. Procedimiento según la reivindicación 9, caracterizado por el hecho de que se conforman valores medios de las masas de compensación de desequilibrio calculadas durante pruebas de medición consecutivas y la prueba de medición se interrumpe cuando los valores medios de las masas de compensación de desequilibrio se encuentran dentro de las tolerancias prefijadas.
Patentes similares o relacionadas:
MÉTODO PARA BALANCEAR RUEDAS DE VEHÍCULOS DE MOTOR, del 8 de Febrero de 2012, de CORGHI S.P.A.: Método para balancear ruedas de vehículos de motor, que comprende las siguientes operaciones: - montaje de la rueda sobre un husillo rotativo de […]
Dispositivo de medición angular y método para el funcionamiento de un dispositivo de medición angular, del 14 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición angular, que abarca • una carcasa , • una unidad de registro de posiciones para la generación de […]
Procedimiento y dispositivo para el equilibrado de una rueda de vehículo durante el giro de la rueda, del 31 de Mayo de 2017, de SNAP-ON EQUIPMENT GMBH: Procedimiento para el giro de un rotor montado de forma rotativa en una máquina equilibradora y accionable mediante un motor de corriente alterna, en particular rueda […]
PROCEDIMIENTO Y UN DISPOSITIVO PARA EQUILIBRAR UNA RUEDA DE AUTOMOVIL., del 16 de Abril de 2007, de SNAP-ON EQUIPMENT GMBH: Procedimiento para equilibrar una rueda de automóvil o una rueda de motocicleta, en el que la rueda, unida de forma solidaria en cuanto a rotación con un árbol principal […]
PROCEDIMIENTO Y SISTEMA DE DETECCION DE AVERIAS DEL ROTOR DE UN MOTOR DE AERONAVE., del 1 de Abril de 2007, de SNECMA MOTEURS SNECMA SERVICES: Procedimiento de detección de daños del rotor de un motor de aeronave que comprende medios de medición de vibración y de velocidad para la adquisición de datos relativos a […]
METODO PARA HACER CORRESPONDER UNA RUEDA DE UN VEHICULO., del 1 de Marzo de 2006, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Procedimiento para hacer corresponder una rueda de vehículo que tiene un neumático montado en una llanta, en el que el neumático y la llanta se hacen girar el uno respecto […]
DISPOSITIVO DE EQUILIBRADO., del 1 de Septiembre de 2005, de BALADYNE CORPORATION: Un montaje 10 de portaherramientas que incluye un portaherramientas 12 que tiene un conjunto 21 de equilibrador adaptado para proporcionar selectivamente […]
DISPOSITIVO PARA MEDIR EL DESEQUILIBRIO DE UN ROTOR., del 16 de Julio de 2005, de SNAP-ON DEUTSCHLAND HOLDING GMBH: Dispositivo para la medición del desequilibrio de un rotor, con un árbol principal, montado de manera que pueda girar en un bastidor de máquina, […]