DETERMINACION DE UN RENDIMIENTO PREDICHO DE UN SISTEMA DE NAVEGACION.
Método para determinar un rendimiento predicho de un sistema de aumentación de navegación,
que comprende:
determinar un rendimiento normal del sistema (10) de aumentación de navegación mediante la generación de valores de integridad normales indicativos del rendimiento normal durante un primer intervalo de tiempo en el pasado;
comparar valores de integridad actuales con valores de integridad normales, y actualizar los valores de integridad normales para tener en cuenta diferencias entre los valores de integridad normales y los valores de integridad actuales que se repiten de forma consistente; y
determinar valores de integridad predichos que indican un rendimiento futuro del sistema de aumentación de navegación durante un segundo intervalo de tiempo en el futuro comparando los valores de integridad normales con los valores de integridad actuales para determinar si existe una desviación, y, si no existe una desviación, usar los valores de integridad normales para determinar los valores de integridad predichos, y, si existe una desviación, determinar los valores de integridad predichos basándose en la desviación, siendo el primer intervalo de tiempo un intervalo de tiempo mayor que el segundo intervalo de tiempo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2005/045613.
Solicitante: RAYTHEON COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 870 WINTER STREET,WALTHAM, MA 02451-1449.
Inventor/es: HOLDERLE,JAMES,E, KEEBAUGH,JAMES,A, LEWELLEN,JEFFREY,W.
Fecha de Publicación: .
Fecha Concesión Europea: 19 de Mayo de 2010.
Clasificación Internacional de Patentes:
- G01S1/00S2B4
- G01S19/08 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › proporcionando información de integridad, p. ej. la salud de los satélites o la calidad de los datos de las efemérides.
Clasificación PCT:
- G01S1/00 G01S […] › Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00).
Fragmento de la descripción:
Determinación de un rendimiento predicho de un sistema de navegación.
Campo técnico
La presente invención se refiere a sistemas de navegación, y más particularmente, a sistemas de navegación por satélite.
Antecedentes
Un Sistema Global de Navegación por Satélite (GNSS) transmite señales de determinación de la distancia y otras, las cuales son utilizadas por usuarios terrestres, marítimos, y aéreos para determinar una posición tridimensional, una velocidad y una hora del día. El GNSS incluye una red de satélites para transmitir las señales a usuarios. Un ejemplo de un GNSS es el Sistema Global de Posicionamiento (GPS). El GPS incluye una red de 24 ó más satélites, denominados satélites GPS, que funcionan en la órbita terrestre media.
Las soluciones de posición que determinan los usuarios del GNSS son en cierta medida imprecisas, debido a factores tales como errores en datos de efemérides de los satélites, deriva del reloj de los satélites, retardos ionosféricos y troposféricos, señales multitrayecto, y ruido en los receptores. Para determinar cómo de grandes podrían ser las imprecisiones en sus soluciones de posición, los usuarios del GNSS pueden calcular límites de integridad, los cuales son límites de alta seguridad para los máximos errores posibles de distancia en sus soluciones de posición. Los límites de integridad restringen la magnitud de la incertidumbre en las soluciones de posición determinadas por usuarios del GNSS. Como la probabilidad de que los errores en una solución de posición de un usuario del GNSS pudieran ser mayores que los límites de integridad es extremadamente pequeña, los usuarios tienen prácticamente garantizado que sus posiciones reales se encuentran dentro de las distancias, delimitadas por integridad, de las soluciones de posición que determinan usando el GNSS. En general, un sistema de navegación con una integridad mayor permite que los usuarios calculen límites de integridad menores, que delimitan de forma más ajustada los posibles errores, y reducen, por lo tanto, la incertidumbre en las posiciones determinadas de los usuarios. El nivel de integridad proporcionado por un GNSS por sí solo puede ser insuficiente para que los usuarios determinen límites de integridad que sean suficientemente pequeños para cumplir los requisitos para algunas aplicaciones, tales como la navegación aérea.
Otros sistemas denominados sistemas de aumentación generan datos de corrección e integridad, y difunden de forma generalizada los datos a los usuarios. Los usuarios utilizan los datos de los sistemas de aumentación para complementar los datos que reciben del GNSS, con el fin de incrementar la precisión y la integridad de sus soluciones de posición. Los datos de corrección generados por el sistema de aumentación son ajustes que compensan algunos de los errores introducidos por factores tales como los enumerados anteriormente. Los usuarios utilizan los datos de corrección con el fin de incrementar la precisión de sus soluciones de posición. Los datos de integridad incluyen valores que limitan los errores residuales que puedan seguir quedando incluso después de aplicar datos de corrección. Los usuarios utilizan los datos de integridad para determinar límites de integridad más ajustados, que reducen el alcance de posibles imprecisiones que queden en sus soluciones de posición.
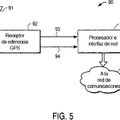
Un sistema de aumentación típico para ser usado con el GPS incluye una o más estaciones de referencia con receptores GPS que reciben datos GPS de los satélites GPS. Las ubicaciones precisas de los receptores de las estaciones de referencia son conocidas. Una estación de control principal recibe los datos GPS recogidos por las estaciones de referencia y determina, para cada satélite GPS, el sesgo entre la distancia esperada al satélite, basándose en las ubicaciones conocidas de los receptores de las estaciones de referencia, y la distancia observada al satélite, determinada usando los datos GPS. La estación de control principal monitoriza también el comportamiento de los satélites GPS e informa de anomalías a los usuarios, proporcionando de este modo una integridad aumentada para los usuarios del GPS. La estación de control principal genera datos de corrección e integridad que son difundidos de forma generalizada a los usuarios.
Un tipo conocido de sistema de aumentación es el sistema de aumentación basado en satélites (SBAS). Un SBAS típico incluye un conjunto de estaciones de referencia con receptores GPS en ubicaciones por toda el área geográfica extensa a la que presta servicio el SBAS. Los datos de corrección e integridad generados por la estación de control principal del SBAS son transmitidos a uno o más satélites de órbita terrestre geosíncrona (GEO) para su difusión generalizada a usuarios por toda el área extensa sobre la misma frecuencia y en un formato similar a los satélites GPS. Este método permite que el receptor GPS del usuario reciba señales tanto de los satélites de GEO del SBAS como de los satélites GPS, y tiene el beneficio añadido de proporcionar los satélites de GEO del SBAS como fuentes adicionales de determinación de la distancia para mejorar la disponibilidad. Como el área de servicio del SBAS está limitada por las huellas de los satélites de GEO del SBAS (que abarcan aproximadamente +/- 76 grados en longitud y latitud) y la cantidad y ubicaciones de las estaciones de referencia del SBAS distribuidas por toda el área de servicio, un único SBAS puede proporcionar servicio a usuarios por toda una nación o continente.
Otro tipo conocido de sistema de aumentación es el sistema de aumentación basado en tierra (GBAS). Un GBAS típico incluye un conjunto de estaciones de referencia con receptores GPS ubicados dentro del área local (por ejemplo, radio de 20 ó 30 millas) a la que presta servicio el GBAS. La estación de control principal del GBAS genera datos de corrección e integridad, que son difundidos de forma generalizada a usuarios en las proximidades inmediatas del GBAS a través de un enlace de datos VHF. Como el área de servicio del GBAS está limitada por el área de cobertura del transmisor VHF y por la distribución localizada de sus estaciones de referencia, un único GBAS se puede usar solamente dentro de un área local, tal como en torno a un aeropuerto. Como el GBAS opera solamente en un área local, puede proporcionar datos de corrección más precisos y datos de integridad delimitados de forma más ajustada para esa área, y puede alertar a usuarios sobre condiciones de averías de forma más rápida que un SBAS que proporcione servicio en la misma área.
Otro tipo conocido de sistema de aumentación, que no usa estaciones de referencia en ubicaciones fijas, es el sistema de aumentación basado en el aire (ABAS). Típicamente, el ABAS usa únicamente el propio receptor GPS del usuario para recibir los datos GPS de satélites GPS, y también puede complementar los datos GPS con datos de otros equipos, tales como un sistema de navegación inercial (INS). El ABAS usa el método de Monitorización Autónoma de Integridad en el receptor (RAIM) para realizar la monitorización de la integridad. Como la RAIM se basa en comparar los resultados logrados usando diferentes combinaciones de satélites GPS, el ABAS requiere más satélites GPS a la vista que los cuatro mínimos requeridos para una solución básica de determinación de la posición. Por lo tanto, el ABAS gana integridad a costa de una disponibilidad posiblemente reducida.
En la patente US nº 5.600.329, la patente US nº 5.963.573, y la solicitud de patente US 20030011511 se describen ejemplos de sistemas para generar datos de corrección para sistemas GPS.
La autorización para usar un GNSS para navegación aérea la concede el Gobierno y organizaciones internacionales, que definen requisitos para diferentes servicios de navegación GNSS que pueden ser usados para tipos diferentes de navegación aérea (por ejemplo, para fases diferentes de vuelo). Algunos servicios de navegación GNSS son soportados por solamente el GNSS, otros son soportados por el GNSS complementado con un sistema de aumentación, tal como un SBAS ó GBAS. Los requisitos para cada tipo de servicio de navegación GNSS especifican umbrales de tope para límites de integridad, los cuales restringen los errores máximos en soluciones de posición del usuario que son permisibles cuando se usa ese tipo de servicio de navegación. Un servicio de navegación está disponible para un usuario (es decir, se ha aprobado su uso) cuando el usuario puede determinar que los límites de integridad no son mayores que el límite de tope definido para ese servicio. Por ejemplo, los requisitos para el servicio...
Reivindicaciones:
1. Método para determinar un rendimiento predicho de un sistema de aumentación de navegación, que comprende:
2. Método según la reivindicación 1, en el que la determinación del rendimiento normal del sistema de aumentación de navegación comprende almacenar los valores de integridad actuales que comprenden por lo menos uno de entre un indicador de error de distancia diferencial de usuario (UDREI), datos de la matriz de covarianza de relojes y efemérides o datos indicadores de error vertical ionosférico en la cuadrícula (GIVEI).
3. Método según la reivindicación 1 ó 2, en el que la determinación de los valores de integridad predichos basándose en la desviación comprende predecir una progresión probable de la desviación mediante comparación de las características de desviación con respecto a un conjunto de patrones de desviación conocidos.
4. Método según la reivindicación 3, en el que la determinación de los valores de integridad predichos basándose en la desviación comprende generar datos ajustados que indican una magnitud predicha y una duración predicha de la desviación.
5. Método según cualquiera de las reivindicaciones anteriores, que comprende además almacenar una no disponibilidad planificada de un satélite.
6. Método según la reivindicación 4, en el que la generación de datos ajustados que indican una magnitud predicha y una duración predicha de la desviación comprende generar datos ajustados usados para ajustar los valores de integridad normales con el fin de generar el valor de integridad predicho.
7. Método según la reivindicación 4 ó 6, en el que la determinación de los valores de integridad predichos basándose en la desviación comprende además monitorizar la desviación.
8. Método según la reivindicación 7, en el que la determinación de los valores de integridad predichos basándose en la desviación comprende además:
9. Método según la reivindicación 8, en el que la determinación de los valores de integridad predichos basándose en la desviación comprende además, si la desviación no ha cesado, determinar si la desviación finalizará y, si la desviación finalizara, prolongar la duración de los datos ajustados.
10. Sistema para determinar un rendimiento predicho de un sistema (10) de aumentación de navegación, que comprende:
11. Sistema según la reivindicación 10, en el que el primer monitor almacena los valores de integridad que comprenden por lo menos uno de entre un indicador de error de distancia diferencial de usuario (UDREI), datos de la matriz de covarianza de relojes y efemérides o datos indicadores de error vertical ionosférico en la cuadrícula (GIVEI).
12. Sistema según la reivindicación 10 u 11, en el que el segundo monitor predice una progresión probable de la desviación mediante comparación de características de la desviación con respecto a un conjunto de patrones de desviación conocidos.
13. Sistema según la reivindicación 12, en el que el segundo monitor genera datos ajustados que reflejan una magnitud predicha y una duración predicha de la desviación.
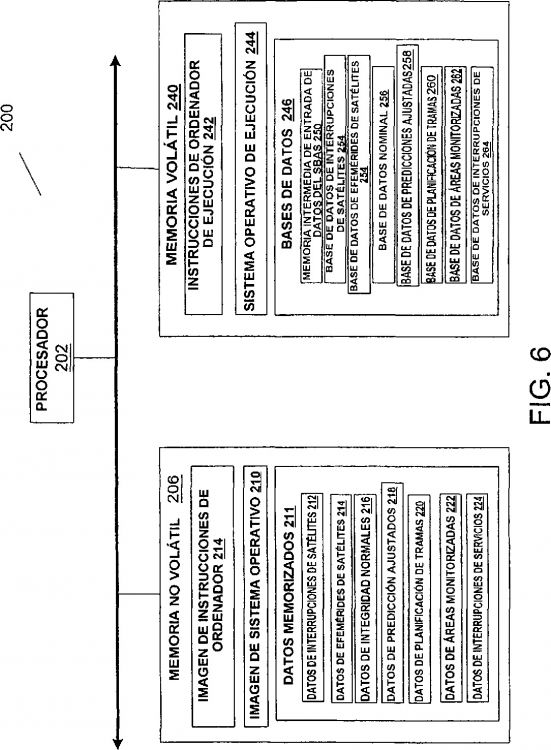
14. Sistema según la reivindicación 10, 11, 12 ó 13, que comprende además un módulo (34) de predicción de satélites para determinar una ubicación de satélites y proporcionar la ubicación de los satélites al primer monitor, comprendiendo el módulo de predicción de satélites una base (36) de datos de no disponibilidades planificadas de satélites.
15. Sistema según la reivindicación 13, en el que el segundo monitor está configurado para generar los datos ajustados usados para ajustar los valores de integridad normales con el fin de generar el valor de integridad predicho.
16. Sistema según la reivindicación 13 ó 15, en el que el segundo monitor está configurado para monitorizar la desviación.
17. Sistema según la reivindicación 16, en el que el segundo monitor está configurado para determinar los valores de integridad predichos sobre la base de la desviación determinando si ha cesado la desviación; y si la desviación ha cesado, revocando los datos ajustados.
18. Sistema según la reivindicación 17, en el que el segundo monitor está configurado, si la desviación no ha cesado, para determinar si la desviación finalizará y, si la desviación finalizara, prolongar la duración de los datos ajustados.
19. Artículo que comprende un soporte legible por máquina que almacena instrucciones ejecutables para determinar un rendimiento predicho de un sistema de aumentación de navegación, provocando las instrucciones que una máquina:
20. Artículo según la reivindicación 19, en el que las instrucciones que provocan que una máquina determine los valores de integridad predichos basándose en la desviación comprenden instrucciones que provocan que la máquina prediga una progresión probable de la desviación comparando características de la desviación con respecto a un conjunto de patrones de desviación conocidos.
21. Artículo según la reivindicación 19 ó 20, en el que las instrucciones que provocan que una máquina determine los valores de integridad predichos basándose en la desviación comprenden las instrucciones que provocan que la máquina genere datos ajustados que reflejan una magnitud predicha y una duración predicha de la desviación.
22. Artículo según la reivindicación 21, en el que las instrucciones que provocan que una máquina genere los datos ajustados comprenden instrucciones para generar datos ajustados usados para ajustar los valores de integridad normales con el fin de generar el valor de integridad predicho.
23. Artículo según la reivindicación 21 ó 22, en el que las instrucciones que provocan que una máquina determine los valores de integridad predichos basándose en la desviación comprenden además instrucciones que provocan que una máquina monitorice la desviación.
24. Artículo según la reivindicación 23, en el que las instrucciones que provocan que una máquina determine los valores de integridad predichos basándose en la desviación comprenden además instrucciones que provocan que una máquina determine si ha cesado la desviación; y si la desviación ha cesado, revoque los datos ajustados.
25. Artículo según la reivindicación 24, en el que las instrucciones que provocan que una máquina determine los valores de integridad predichos basándose en la desviación comprenden además instrucciones que provocan que una máquina, si la desviación no ha cesado, determine si la desviación finalizará y, si la desviación finalizara, prolongue la duración de los datos ajustados.
Patentes similares o relacionadas:
 PROCEDIMIENTO Y SISTEMA DE POSICIONAMIENTO POR SATELITES, del 16 de Septiembre de 2010, de ASTRIUM SAS: Procedimiento para el posicionamiento de un usuario sobre la Tierra (T), empleando el citado procedimiento una pluralidad de satélites […]
PROCEDIMIENTO Y SISTEMA DE POSICIONAMIENTO POR SATELITES, del 16 de Septiembre de 2010, de ASTRIUM SAS: Procedimiento para el posicionamiento de un usuario sobre la Tierra (T), empleando el citado procedimiento una pluralidad de satélites […]
 PROCEDIMIENTO Y APARATO PARA OPERAR UN RECEPTOR DE UN SISTEMA DE POSICIONAMIENTO POR SATELITE, del 1 de Junio de 2010, de SNAPTRACK INCORPORATED: Un procedimiento para operar un aparato de localización en un sistema de posicionamiento por satélite, que comprende:
determinar y almacenar […]
PROCEDIMIENTO Y APARATO PARA OPERAR UN RECEPTOR DE UN SISTEMA DE POSICIONAMIENTO POR SATELITE, del 1 de Junio de 2010, de SNAPTRACK INCORPORATED: Un procedimiento para operar un aparato de localización en un sistema de posicionamiento por satélite, que comprende:
determinar y almacenar […]
Sistema de aumento espacial o aeronáutico con gestión simplificada de sus mensajes de navegación, del 22 de Julio de 2020, de THALES: Sistema de aumento espacial o aeronáutico, adaptado para mejorar la precisión y fiabilidad de los datos suministrados por un sistema de navegación […]
Sistema de aumento de la disponibilidad y de las prestaciones de un sistema de geolocalización por satélite, del 23 de Noviembre de 2016, de THALES: Sistema de aumento de las prestaciones de un sistema de geolocalización por satélite compuesto al menos por un satélite y al menos por un receptor de posicionamiento […]
Instalación de vigilancia para un sistema de determinación de posición por satélite aumentado y sistema de determinación de posición por satélite aumentado, del 26 de Octubre de 2016, de Thales Deutschland GmbH: Instalación de vigilancia para un sistema de determinación de posición por satélite, aumentado, el cual presenta una estación de referencia con una instalación […]
Procedimiento para mejorar de la continuidad en un sistema de navegación por satélite de doble frecuencia, del 24 de Agosto de 2016, de Airbus DS GmbH: Procedimiento para procesar un mensaje de alarma que se ha generado y transmitido por medio de un procedimiento para mejorar la continuidad en un […]
Sistema y procedimiento de determinación del error de posición de un receptor de localización satelital, del 3 de Agosto de 2016, de THALES: Sistema de determinación de una distribución de un error de posición de un receptor de señales de localización, siendo enviadas dichas señales por al menos un satélite, […]
Carga útil de satélite para sistemas de aumentación, del 1 de Julio de 2015, de THALES: Carga útil para satélite de aumentación que comprende una vía de entrada adaptada para la recepción de señales de navegación emitidas por al menos una […]