DISPOSITIVO PARA DESCORTEZAR O PREPARAR UN TROZO DE CARNE O UNA PARTE DE UN ANIMAL DE MATADERO.
Dispositivo para descortezar o preparar un trozo de carne o una parte de un animal de matadero recortando una o varias partes de un trozo de carne o de una parte de un animal de matadero,
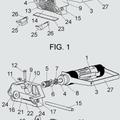
estando previsto un dispositivo de orientación para orientar el trozo, estando previsto un robot industrial con un brazo manipulador, estando prevista una herramienta de corte que separa la pieza del trozo, estando previsto un sistema sensor que detecta las coordenadas de la superficie de la pieza que ha de ser separada del trozo y comprendiendo el sistema sensor una cámara y un sistema de procesamiento de imágenes, caracterizado porque como herramienta de corte está previsto un dispositivo para despellejar y/o descortezar móvil o fijo con una hoja y un cilindro de arrastre que aprieta el trozo contra la hoja y porque la herramienta de corte está prevista en el brazo manipulador o porque el brazo manipulador está provisto de una pinza
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04007967.
Solicitante: MAJA-MASCHINENFABRIK HERMANN SCHILL GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: TULLASTRASSE 4 77694 KEHL-GOLDSCHEUER ALEMANIA.
Inventor/es: SCHILL, JOACHIM, ILCH, HARTMUT.
Fecha de Publicación: .
Fecha Solicitud PCT: 1 de Abril de 2004.
Fecha Concesión Europea: 28 de Julio de 2010.
Clasificación Internacional de Patentes:
- A22B5/00B2
- A22B5/00B4
- A22C17/12 NECESIDADES CORRIENTES DE LA VIDA. › A22 CARNICERIA; TRATAMIENTO DE LA CARNE; TRATAMIENTO DE LAS AVES DE CORRAL O DEL PESCADO. › A22C TRATAMIENTO DE LA CARNE, DE LAS AVES DE CORRAL O DEL PESCADO (conservas A23B; producción de composiciones a base de proteínas para la alimentación A23J 1/00; productos alimenticios a base de pescado, carne o aves de corral A23L; trituración, p. ej. picado de la carne B02C 18/00; preparación de proteínas en sí C07K 1/00). › A22C 17/00 Otros dispositivos para el tratamiento de la carne o de los huesos. › Aparatos para separar la piel.
Clasificación PCT:
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Estado de la técnica
La invención parte de un dispositivo y un procedimiento para descortezar o preparar un trozo de carne o una parte de un animal de matadero según el preámbulo de la reivindicación 1.
Al mecanizar un trozo de carne o una parte de un animal de matadero, se quita la piel, la grasa, los músculos, los tendones y la corteza. Si el trozo de carne presenta un grosor aproximadamente uniforme, el descortezado y despellejado puede realizarse con ayuda de un dispositivo para despellejar, desvelar y/o descortezar a máquina. Esto es válido, por ejemplo, para una panceta separada de la carcasa. No obstante, los restos de grasa, que en un mecanizado automático permanecen en una placa de carne o los restos de carne que en el mecanizado automático permanecen en una placa de grasa se retiran hasta la fecha manualmente. Aquí, el operador debe distinguir entre carne muscular y grasa. En los bordes de la panceta separada de la carcasa existen en muchos casos pliegues de la piel. Debido al grosor poco uniforme, en estas zonas también es necesario hacer un repaso manual. Este mecanizado manual no sólo requiere tiempo y costes sino que también va unido a un riesgo de lesiones para el operador.
El descortezado de un jamón de cerdo separado de la carcasa se realiza hasta la fecha también parcialmente a mano. El jamón con pie o la paletilla con costillas son cogidos manualmente por un operador y se aproximan a la cuchilla de una máquina descortezadora. El jamón debe orientarse de tal modo que la cuchilla pueda cortar la corteza al iniciar el corte. En cuanto la cuchilla haya penetrado en la corteza, el jamón se mete a presión contra la cuchilla mediante cilindros y se hace girar. Esto supone un gran riesgo de sufrir lesiones para el operador, en particular en la región de las manos. Además, el mecanizado manual va unido a unos costes elevados.
Por el documento US-A-5 902 177 se conoce un dispositivo para retirar las costillas de un animal de matadero. Para ello, el trozo que ha de ser mecanizado se coloca en una base. La superficie del trozo que ha de ser mecanizado se detecta ópticamente y se controla un robot equipado con una herramienta de corte para recortar la capa que contiene las costillas. El dispositivo no es adecuado para separar otras zonas de un animal de matadero.
Por el documento US-A-5 738 577 se conoce un dispositivo para descortezar y despellejar partes de animales de matadero, en el que el trozo se coloca en una cinta transportadora y se alimenta a una cuchilla. Es necesario orientar y colocar el trozo manualmente en la cinta transportadora.
Por el documento WO 01/67873 se conoce un dispositivo para cortar animales de matadero, en el que se transportan las carcasas y en el que se determina mediante una cámara y un ordenador el tamaño y la posición de la carcasa durante el movimiento. Un brazo de robot equipado con una cuchilla circular es controlado mediante el ordenador y divide la carcasa durante el movimiento. No obstante, el dispositivo no es adecuado para el despellejado o descortezado de partes de animales de matadero.
La invención y sus ventajas
En cambio, el dispositivo según la invención con las características de la reivindicación 1 tiene la ventaja de que los trozos que han de ser separados se detectan mediante un sistema sensor. Para ello están previstos una cámara con un sistema de procesamiento de imágenes y, dado el caso, adicionalmente un sistema de medición de la distancia. La cámara y el sistema de procesamiento de imágenes detectan las coordenadas del trozo que ha de ser separado, en particular en la superficie del mismo, en dos o tres dimensiones. La distancia entre la superficie y el brazo manipulador del robot puede detectarse también con el procesamiento de imágenes o con un sistema de medición de la distancia. Gracias a ello, las coordenadas de la superficie del trozo que ha de ser separado pueden detectarse completamente. Estos datos detectados son procesados por microprocesadores que los convierten en señales. Las señales controla una herramienta de corte o una pinza en un brazo manipulador de un robot industrial. El brazo manipulador aproxima la herramienta de corte al trozo en reposo o desplazado a una velocidad constante. Con ayuda de la herramienta de corte se separan piezas del trozo. El brazo manipulador equipado con una pinza recoge el trozo y lo alimenta a una herramienta de corte fija. La pinza orienta el trozo de tal modo que la pieza puede ser separada mediante la herramienta de corte.
No es necesario un repaso manual. Para garantizar que las piezas se han cortado completamente, el trozo puede volver a examinarse tras el mecanizado con ayuda de la cámara y el sistema de procesamiento de imágenes. Si aún quedan restos en el trozo, se vuelve a mandar la herramienta de corte. El control del brazo manipulador se realiza con ayuda de un ordenador.
Con el dispositivo según la invención pueden mecanizarse zonas de trozos de carne o partes de animales de matadero que tienen formas irregulares o que sólo son difícilmente accesibles y que hasta la fecha pudieron mecanizarse exclusivamente de forma manual. La distinción entre las piezas a separar y el entorno se realiza con ayuda de la cámara y el procesamiento de imágenes.
Los trozos de productos alimenticios mecanizados con el dispositivo según la invención pueden alimentarse tras la separación de las piezas no deseadas al procesamiento posterior o al embalaje.
El robot industrial puede ser un robot con un brazo manipulador con varios grados de
libertad o un robot scara con un brazo manipulador. El número de grados de libertad es menor en el caso indicado en último lugar, aunque es suficiente según la aplicación.
Según una configuración ventajosa de la invención, como sistema de medición de la distancia está previsto un emisor, un receptor y una unidad de evaluación. La determinación de la distancia se realiza sin contacto. Los emisores y receptores pueden usar señales ópticas o acústicas. Puede usarse, por ejemplo, un telémetro láser. Si la superficie del trozo que ha de ser mecanizado es casi plana, basta con determinar la distancia entre un punto cero y un punto de medición en la superficie del trozo en la zona de la pieza que ha de ser separada. Esto es válido, por ejemplo, en el caso de una panceta separada de la carcasa. El brazo manipulador con la herramienta de corte se aproxima posteriormente a la superficie del trozo el recorrido determinado por la distancia medida. Finalmente, la herramienta de corte se mueve en una zona por la superficie del trozo que corresponde a la pieza que ha de ser separada y que se ha determinado con ayuda de la cámara y el procesamiento de imágenes. La herramienta de corte se acciona de tal modo que la pieza se corta del trozo. Las piezas que han de ser separadas pueden ser restos de carne o de grasa que han permanecido en la superficie durante el descortezado a máquina. Los restos de este tipo se retiran hasta la fecha manualmente con ayuda de un cortador de carne. Se trata de una cuchilla con una hoja anular accionada de forma rotatoria con ajuste de la profundidad de corte. Una cuchilla de este tipo puede estar prevista en el brazo manipulador para eliminar los restos. Puesto que la carne muscular roja y la grasa blanca se distinguen suficientemente por su color, las zonas pueden ser distinguidas con ayuda de la cámara y el procesamiento de imágenes. Por el tamaño de las zonas que han de ser separadas, puede determinarse al menos aproximadamente el grosor de la zona. La profundidad de corte se ajusta según el grosor. El brazo manipulador equipado con un cortador de carne se desplaza a lo largo de la superficie y separa los restos del trozo.
En lugar de un cortador de carne con hoja anular, también puede estar prevista una hoja rotatoria en forma de disco. Además, es posible usar otras cuchillas, que realizan un corte efectuado por presión progresiva o que son accionadas para realizar un movimiento de aserrado.
Según otra configuración ventajosa de la invención están previstos tres emisores y receptores para determinar la distancia entre tres puntos de medición y un punto cero predeterminado. Si la superficie del trozo no es plana, como por ejemplo la superficie orientada hacia fuera de una mitad de un animal de matadero, no basta con determinar la distancia entre la superficie y un punto cero. Por lo contrario, es necesario determinar la forma del trozo en la zona que ha de ser mecanizada. Esto se hace mediante la determinación de la distancia entre tres puntos de medición y...
Reivindicaciones:
1. Dispositivo para descortezar o preparar un trozo de carne o una parte de un animal de matadero recortando una o varias partes de un trozo de carne o de una parte de un animal de matadero, estando previsto un dispositivo de orientación para orientar el trozo, estando previsto un robot industrial con un brazo manipulador, estando prevista una herramienta de corte que separa la pieza del trozo, estando previsto un sistema sensor que detecta las coordenadas de la superficie de la pieza que ha de ser separada del trozo y comprendiendo el sistema sensor una cámara y un sistema de procesamiento de imágenes, caracterizado porque como herramienta de corte está previsto un dispositivo para despellejar y/o descortezar móvil o fijo con una hoja y un cilindro de arrastre que aprieta el trozo contra la hoja y porque la herramienta de corte está prevista en el brazo manipulador o porque el brazo manipulador está provisto de una pinza.
2. Dispositivo según la reivindicación 1, caracterizado porque el sistema sensor comprende un sistema de medición de la distancia que determina la distancia entre un punto cero predeterminado y un punto de medición en la superficie del trozo.
3. Dispositivo según la reivindicación 2, caracterizado porque como sistema de medición de la distancia están previstos un emisor, un receptor y una unidad de evaluación.
4. Dispositivo según la reivindicación 2, caracterizado porque el sistema de medición de la distancia está provisto de tres emisores y receptores para determinar sin contacto la distancia entre un punto cero y tres puntos de medición en la superficie del trozo.
5. Dispositivo según la reivindicación 3 ó 4, caracterizado porque están previstos emisores y receptores ópticos o acústicos.
6. Dispositivo según una de las reivindicaciones anteriores, caracterizado porque como dispositivo de orientación está prevista una cinta transportadora.
7. Dispositivo según una de las reivindicaciones anteriores, caracterizado porque como dispositivo de orientación están previstas una placa y distintas grapas para fijar el trozo en la placa.
8. Dispositivo según la reivindicación 7, caracterizado porque la placa presenta un color diferente al color del trozo.
9. Dispositivo según la reivindicación 6, caracterizado porque en el robot industrial está prevista una pinza, que recoge el trozo de la cinta transportadora y lo conduce a un dispositivo para despellejar y/o descortezar fijo.
10. Dispositivo según una de las reivindicaciones anteriores, caracterizado porque está previsto un dispositivo de aspiración para aspirar las partes cortadas.
Patentes similares o relacionadas:
Cuchilla giratoria con accionamiento a motor, del 27 de Mayo de 2020, de BETTCHER INDUSTRIES, INC.: Una hoja de cuchilla giratoria anular para la rotación alrededor de un eje de rotación (R') en una cuchilla giratoria accionada por motor , la […]
Cuchilla rotatoria accionada eléctricamente, con hoja de cuchilla rotatoria con muescas y guía de recorte, del 6 de Mayo de 2020, de BETTCHER INDUSTRIES, INC.: Una hoja de cuchilla rotatoria anular para una cuchilla rotatoria accionada eléctricamente , la hoja de cuchilla rotatoria anular configurada […]
Cuchilla giratoria eléctrica, del 16 de Abril de 2019, de BETTCHER INDUSTRIES, INC.: Una cuchilla giratoria eléctrica que comprende: un montaje de caja de engranajes que incluye una cubierta de caja de engranajes y un tren de engranajes […]
Cuchilla giratoria con accionamiento a motor, del 15 de Noviembre de 2018, de BETTCHER INDUSTRIES, INC.: Una cuchilla giratoria accionada por motor que comprende: un conjunto de cabezal que incluye un conjunto de caja […]
Descortezadora manual con cambio de cuchilla fácil., del 24 de Mayo de 2017, de FREUND MASCHINENFABRIK GMBH & CO. KG: Descortezadora manual que comprende un rodillo dentado , accionado por motor y sujetado de manera giratoria alrededor de un eje en […]
Máquina de desollar, del 7 de Diciembre de 2016, de Teknologisk Institut (100.0%): Una máquina de desollar para desollar una superficie de un producto que es sustancialmente plano en su dimensión principal y que es curvado transversalmente […]
Dispositivo de desollado para eliminar la piel de una parte de una canal de animal cuando se transporta mediante un medio transportador, del 10 de Agosto de 2016, de Marel Meat Processing B.V: Un dispositivo de desollado para eliminar la piel de una canal de animal o de partes de la canal cuando se transporta mediante un medio […]
 PELADOR DE JAMONES, del 17 de Diciembre de 2015, de MECANIZADOS Y REPARACIONES BELVIS, S.L: 1. Dispositivo desollador de jamones, caracterizado porque está constituido a partir de una carcasa en funciones de asidero, en cuyo seno se […]
PELADOR DE JAMONES, del 17 de Diciembre de 2015, de MECANIZADOS Y REPARACIONES BELVIS, S.L: 1. Dispositivo desollador de jamones, caracterizado porque está constituido a partir de una carcasa en funciones de asidero, en cuyo seno se […]