CONTROL DE ASPIRACION.
Aparato para controlar la aspiración en un sistema microquirúrgico (10),
que comprende:
una fuente de gas presurizado (12);
un generador de vacío (22) acoplado fluídicamente a dicha fuente de gas presurizado (12);
una cámara de aspiración (26) acoplada fluídicamente a dicha fuente de gas presurizado (12) y dicho generador de vacío (22);
una válvula proporcional de vacío (16) acoplada fluídicamente entre dicha fuente de gas presurizada (12) y dicho generador de vacío (22);
un transductor de presión (24) acoplado fluídicamente a dicha cámara de aspiración (26);
un controlador proporcional (40);
un ordenador (38) eléctricamente acoplado a dicha válvula proporcional de vacío (16), dicho transductor de presión (24) y dicho controlador proporcional (40); y caracterizado porque el aparato comprende además:
una válvula proporcional de presión (20) acoplada fluídicamente entre dicha fuente de gas presurizado (12) y dicha cámara de aspiración (26); y
dicho ordenador (38) está acoplado eléctricamente a dicha válvula proporcional de presión (20);
en el que, tras la selección de una presión de succión deseada para dicha cámara de aspiración (26) por medio de dicho controlador proporcional (40), dicho transductor de presión (24) determina una presión de succión real en dicha cámara de aspiración y proporciona a dicho ordenador una señal correspondiente a dicha presión de succión determinada, y dicho ordenador proporciona señales a dicha válvula proporcional de vacío (16) y dicha válvula proporcional de presión (20) para mantener dicha presión de succión real próxima a dicha presión de succión deseada
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/005957.
Solicitante: ALCON, INC.
Nacionalidad solicitante: Suiza.
Dirección: P.O. BOX 62 BOSCH 69,6331 HUNENBERG.
Inventor/es: GAO,SHAWN X, HOPKINS,MARK,ALAN.
Fecha de Publicación: .
Fecha Concesión Europea: 6 de Enero de 2010.
Clasificación Internacional de Patentes:
- A61M1/00H2
Clasificación PCT:
- A61M1/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › Dispositivos de succión o de bombeo de uso médico; Dispositivos para extraer, tratar o transportar los líquidos del cuerpo; Sistemas de drenaje (catéteres A61M 25/00; conectores o acoplamientos para tubos, válvulas o conjuntos de derivación, especialmente concebidos para uso médico A61M 39/00; dispositivos para tomar muestras sanguíneas A61B 5/15; instrumentos para retirar la saliva para dentistas A61C 17/06; filtros para implantar en los vasos sanguíneos A61F 2/01).
Fragmento de la descripción:
Control de aspiración.
Campo de la invención
La presente invención pertenece en general al control de la aspiración en sistemas microquirúrgicos y, más particularmente, al control de la aspiración en sistemas microquirúrgicos oftálmicas.
Descripción de la técnica relacionada
Durante la cirugía de incisión pequeña y, particularmente, durante la cirugía oftálmica, se insertan sondas pequeñas en el lugar operativo para cortar, retirar o manipular de otra forma el tejido. Durante estas intervenciones quirúrgicas, se introduce fluido dentro del ojo, y el fluido de infusión y el tejido se aspiran a partir del lugar quirúrgico. Los tipos de sistemas de aspiración utilizados antes de la presente invención se caracterizaban en general por ser de flujo controlado o de vacío controlado, dependiendo del tipo de bomba utilizado en el sistema. Cada tipo de sistema tiene ciertas ventajas.
La patente US nº 5.549.139 describe, por ejemplo, un sistema de control neumático para proporcionar aire presurizado y vacío a instrumentos microquirúrgicos oftálmicos. El documento WO9317729 describe un sistema para controlar el flujo de fluido en una pieza de mano microquirúrgica. La patente US nº 5.020.535 da a conocer un aparato de accionamiento de pieza de mano para tijeras quirúrgicas motorizadas en las que la presión de corte es proporcional a la posición de un sensor de posición accionado por el pie.
Los sistemas de aspiración controlados por vacío son maniobrados estableciendo un nivel de vacío deseado que el sistema busca mantener. El caudal depende de la presión intraocular, el nivel de vacío y la resistencia al flujo en la trayectoria de fluido. La información de caudal real no está disponible. Los sistemas de aspiración controlados por vacío utilizan típicamente una bomba venturi o de diafragma. Los sistemas de aspiración controlados por vacío ofrecen las ventajas de tiempos de respuesta rápidos, control de niveles de vacío decrecientes y buenas prestaciones fluídicas mientras se aspira aire, tal como durante un procedimiento de intercambio de aire/fluido. Los inconvenientes de dichos sistemas son la falta de información de flujo, que da como resultado flujos elevados transitorios durante la facoemulsificación o la fragmentación, acoplada con una falta de detección de oclusión. Los sistemas controlados por vacío son difíciles de maniobrar en un modo de flujo controlado debido a los problemas de medición no invasiva del flujo en tiempo real.
Los sistemas de aspiración controlados por flujo son maniobrados estableciendo un caudal de aspiración deseado para que el sistema lo mantenga. Los sistemas de aspiración controlados por flujo utilizan típicamente una bomba peristáltica, una bomba de caracol o una bomba de paletas. Los sistemas de aspiración controlados por flujo ofrecen las ventajas de caudales estables y niveles de vacío automáticamente crecientes bajo oclusión. Los inconvenientes de dichos sistemas son tiempos de respuestas relativamente lentos y respuestas de rotura de oclusión no deseadas, cuando se utilizan componentes dóciles grandes, y el vacío no puede reducirse linealmente durante la oclusión de la punta. Los sistemas controlados por flujo son difíciles de maniobrar en un modo de vacío controlado debido a que los retrasos de tiempo en la medición del vacío pueden provocar inestabilidad en el bucle de control, reduciendo las prestaciones dinámicas.
Un sistema quirúrgico oftálmico actualmente disponible, el sistema MILLENIUM de Storz Instrument Company, contiene un sistema de aspiración controlado por vacío (que utiliza una bomba venturi) y un sistema de aspiración controlado por flujo independiente (que utiliza una bomba de caracol). Las dos bombas no pueden utilizarse simultáneamente y cada bomba requiere tubos de aspiración y cartuchos independientes.
Otro sistema quirúrgico oftálmico actualmente disponible, el sistema ACCURUS® de Alcon Laboratories, Inc., contiene una bomba venturi y una bomba peristáltica que funcionan en serie. La bomba venturi aspira material desde el lugar quirúrgico hasta una pequeña cámara de recogida. La bomba peristáltica bombea el material aspirado desde la pequeña cámara de recogida hasta una bolsa de recogida más grande. La bomba peristáltica no proporciona vacío de aspiración al lugar quirúrgico. De este modo, el sistema funciona como un sistema de vacío controlado.
En consecuencia, continúa existiendo la necesidad de un procedimiento mejorado de controlar la aspiración en un sistema microquirúrgico.
Sumario de la invención
La presente invención proporciona un sistema microquirúrgico capaz de controlar la aspiración por medio de un modo de control de vacío, un modo de control de succión o un modo de control de flujo.
En un modo de control de succión de la presente invención, se crea una presión de succión deseada en una cámara de aspiración utilizando una fuente de gas presurizado y un generador de vacío. Se aspira fluido desde un dispositivo quirúrgico hasta la cámara de aspiración. Se determina una presión de succión real en la cámara de aspiración. Se modifican una presión generada por la fuente de gas presurizado y un vacío generado por el generador de vacío, en respuesta a la presión de succión real del paso de determinación, para mantener la presión de succión real próxima a la presión de succión deseada.
En un modo de control de flujo de la presente invención se crea un caudal de succión deseado en una cámara de aspiración utilizando una fuente de gas presurizado, un generador de vacío y una bomba. Se aspira fluido desde un dispositivo quirúrgico hasta la cámara de aspiración. Se determina un nivel real de fluido en la cámara de aspiración. Se calcula un caudal de succión en respuesta al nivel real de fluido del paso de determinación. Se modifican una presión generada por la fuente de gas presurizado y un vacío generado por el generador de vacío para mantener el caudal de succión próximo al caudal de succión deseado.
En consecuencia, se proporciona un sistema como se detalla en la reivindicación 1. Se proporcionan formas de realización ventajosas en las reivindicaciones subordinadas. Asimismo, se proporciona un sistema según la reivindicación 7 con formas de realización ventajosas detalladas en las reivindicaciones subordinadas a la misma.
Breve descripción de los dibujos
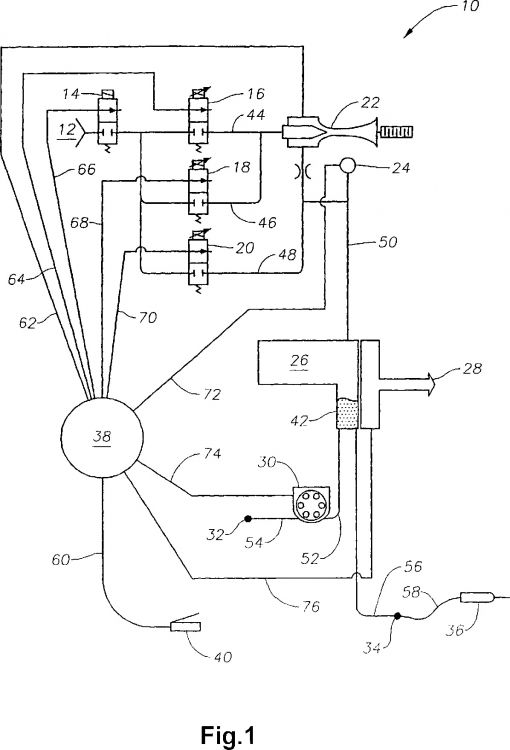
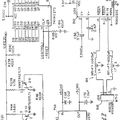
Para una comprensión más completa de la presente invención y para objetos y ventajas adicionales de la misma, se hace referencia a la siguiente descripción tomada conjuntamente con el dibujo adjunto, en el cual la figura 1 es un diagrama esquemático que ilustra el control de aspiración en un sistema microquirúrgico.
Descripción detallada de las formas de realización preferidas
La forma de realización preferida de la presente invención y sus ventajas se entienden mejor haciendo referencia a la figura 1 de los dibujos. Un sistema microquirúrgico 10 incluye una fuente de gas presurizado 12, una válvula de aislamiento 14, una válvula proporcional de vacío 16, una segunda válvula proporcional de vacío opcional 18, una válvula proporcional de presión 20, un generador de vacío 22, un transductor de presión 24, una cámara de aspiración 26, un sensor de nivel de fluido 28, una bomba 30, una bolsa de recogida 32, una lumbrera de aspiración 34, un dispositivo quirúrgico 36, un ordenador o microprocesador 38 y un dispositivo de control proporcional 40. Los diversos componentes del sistema 10 están conectados fluídicamente por medio de conductos de fluido 44, 46, 48, 50, 52, 54, 56 y 58. Los diversos componentes del sistema 10 están conectados eléctricamente por medio de interfaces 60, 62, 64, 66, 68, 70, 72, 74 y 76. La válvula 14 es preferentemente una válvula de solenoide de "conexión/desconexión". Las válvulas 16-20 son preferentemente válvulas de solenoide proporcionales. El generador de vacío 22 puede ser cualquier dispositivo adecuado para generar vacío, pero es preferentemente un chip de vacío o un chip inteligente venturi que genera vacío cuando la válvula de aislamiento 14 y las válvulas proporcionales de vacío 16 y/o 18 están abiertas y se hace pasar gas desde la fuente de gas presurizado 12 a través del generador de vacío 22. El transductor de presión 24 puede ser cualquier dispositivo adecuado para medir directa o indirectamente la presión y el vacío. El sensor de nivel de fluido 28 puede ser cualquier dispositivo adecuado para medir el nivel de un fluido 42 dentro de la cámara de aspiración 26, pero es preferentemente capaz de medir niveles...
Reivindicaciones:
1. Aparato para controlar la aspiración en un sistema microquirúrgico (10), que comprende:
una fuente de gas presurizado (12);
un generador de vacío (22) acoplado fluídicamente a dicha fuente de gas presurizado (12);
una cámara de aspiración (26) acoplada fluídicamente a dicha fuente de gas presurizado (12) y dicho generador de vacío (22);
una válvula proporcional de vacío (16) acoplada fluídicamente entre dicha fuente de gas presurizada (12) y dicho generador de vacío (22);
un transductor de presión (24) acoplado fluídicamente a dicha cámara de aspiración (26);
un controlador proporcional (40);
un ordenador (38) eléctricamente acoplado a dicha válvula proporcional de vacío (16), dicho transductor de presión (24) y dicho controlador proporcional (40); y caracterizado porque el aparato comprende además:
una válvula proporcional de presión (20) acoplada fluídicamente entre dicha fuente de gas presurizado (12) y dicha cámara de aspiración (26); y
dicho ordenador (38) está acoplado eléctricamente a dicha válvula proporcional de presión (20);
en el que, tras la selección de una presión de succión deseada para dicha cámara de aspiración (26) por medio de dicho controlador proporcional (40), dicho transductor de presión (24) determina una presión de succión real en dicha cámara de aspiración y proporciona a dicho ordenador una señal correspondiente a dicha presión de succión determinada, y dicho ordenador proporciona señales a dicha válvula proporcional de vacío (16) y dicha válvula proporcional de presión (20) para mantener dicha presión de succión real próxima a dicha presión de succión deseada.
2. Aparato según la reivindicación 1, que comprende además un dispositivo quirúrgico (36) para aspirar tejido acoplado fluídicamente a dicha cámara de aspiración (26).
3. Aparato según la reivindicación 1, en el que dicho generador de vacío (22) es un chip de vacío.
4. Aparato según la reivindicación 1, en el que dicho generador de vacío (22) es un chip venturi.
5. Aparato según la reivindicación 1, en el que dicho sistema microquirúrgico (10) es un sistema microquirúrgico oftálmico.
6. Aparato según la reivindicación 1, que se puede hacer funcionar en un modo de control de flujo y que comprende además:
un sensor de nivel de fluido (28) acoplado funcionalmente a dicha cámara de aspiración (26) y acoplado eléctricamente a dicho ordenador (38);
una bomba (30) acoplada fluídicamente a dicha cámara de aspiración (26) y acoplada eléctricamente a dicho ordenador (38);
en el que, tras la selección de un caudal de succión deseado para dicha cámara de aspiración (26) por medio de dicho controlador proporcional (40), dicho ordenador (38) proporciona a dicha bomba (30) una señal correspondiente a una velocidad de bomba en respuesta a dicho caudal de succión deseado, dicho sensor de nivel de fluido (28) determina un nivel de fluido real en dicha cámara de aspiración y proporciona a dicho ordenador (38) una señal correspondiente a dicho nivel de fluido determinado, y dicho ordenador (38) calcula un caudal de succión en respuesta a dicho nivel de fluido determinado y proporciona señales a dicha válvula proporcional de vacío (16) y dicha válvula proporcional de presión (20) para mantener dicho caudal de succión próximo a dicho caudal de succión deseado.
7. Aparato para controlar la aspiración en un sistema microquirúrgico (10), que comprende:
una fuente de gas presurizado (12);
un generador de vacío (22) acoplado fluídicamente a dicha fuente de gas presurizado (12);
una cámara de aspiración (26) acoplada fluídicamente a dicha fuente de gas presurizado (12) y dicho generador de vacío (22);
una válvula proporcional de vacío (16) acoplada fluídicamente entre dicha fuente de gas presurizado (12) y dicho generador de vacío (22);
un sensor de nivel de fluido (28) acoplado funcionalmente a dicha cámara de aspiración (26);
un controlador proporcional (40);
una bomba (30) acoplada fluídicamente a dicha cámara de aspiración (26);
un ordenador (38) eléctricamente acoplado a dicha válvula proporcional de vacío (16), dicho sensor de nivel de fluido (28), dicha bomba (30) y dicho controlador proporcional (40), y caracterizado porque el aparato comprende además:
una válvula proporcional de presión (20) acoplada fluídicamente entre dicha fuente de gas presurizado (12) y dicha cámara de aspiración (26); y
dicho ordenador (38) está eléctricamente acoplado a dicha válvula proporcional de presión (20);
en el que, tras la selección de un caudal de succión deseado para dicha cámara de aspiración (26) por medio de dicho controlador proporcional (40), dicho sensor de nivel de fluido (28) determina un nivel de fluido real en dicha cámara de aspiración y proporciona a dicho ordenador (38) una señal correspondiente a dicho nivel de fluido determinado, y dicho ordenador (38) calcula un caudal de succión en respuesta a dicho nivel de fluido determinado y proporciona señales a dicha válvula proporcional de vacío (16) y dicha válvula proporcional de presión (20) para mantener dicho caudal de succión próximo a dicho caudal de succión deseado.
8. Aparato según la reivindicación 7, que comprende además un dispositivo quirúrgico (36) para aspirar tejido acoplado fluídicamente a dicha cámara de aspiración (26).
9. Aparato según la reivindicación 7, en el que dicho generador de vacío (22) es un chip de vacío.
10. Aparato según la reivindicación 7, en el que dicho generador de vacío (22) es un chip venturi.
11. Aparato según la reivindicación 7, en el que dicho sistema microquirúrgico (10) es un sistema microquirúrgico oftálmico.
12. Aparato según la reivindicación 7, en el que dicha bomba es una bomba peristáltica.
Patentes similares o relacionadas:
FILTRO DE AIRE PARA SISTEMA QUIRÚRGICO OFTÁLMICO, del 16 de Noviembre de 2011, de BAUSCH & LOMB INCORPORATED: Un sistema de medición de flujo de aspiración para un sistema microquirúrgico oftálmico incluyendo: un canal de flujo para recibir un flujo de fluido de aspiración a su través; […]
 SISTEMA DE TRATAMIENTO DE TEJIDOS ASISTIDO POR VACÍO, del 7 de Marzo de 2011, de KCI LICENSING, INC.: Un sistema para estimular la cicatrización de tejido, que comprende: una almohadilla porosa ; un apósito estanco ; un medio de conexión del extremo distal […]
SISTEMA DE TRATAMIENTO DE TEJIDOS ASISTIDO POR VACÍO, del 7 de Marzo de 2011, de KCI LICENSING, INC.: Un sistema para estimular la cicatrización de tejido, que comprende: una almohadilla porosa ; un apósito estanco ; un medio de conexión del extremo distal […]
 SISTEMA QUIRÚRGICO PROVISTO DE UN SENSOR DE FLUJO NO INVASIVO, del 25 de Enero de 2011, de ALCON, INC: Sistema quirúrgico, que comprende: (a) una consola quirúrgica , presentando la consola quirúrgica una parte de recepción de casete para recibir un casete quirúrgico […]
SISTEMA QUIRÚRGICO PROVISTO DE UN SENSOR DE FLUJO NO INVASIVO, del 25 de Enero de 2011, de ALCON, INC: Sistema quirúrgico, que comprende: (a) una consola quirúrgica , presentando la consola quirúrgica una parte de recepción de casete para recibir un casete quirúrgico […]
 CONTROL DE REFLUJO EN UN SISTEMA MICROQUIRURGICO, del 4 de Noviembre de 2010, de ALCON, INC: Aparato para controlar el reflujo en un sistema microquirúrgico , que comprende: una fuente de gas presurizado ; una cámara de aspiración […]
CONTROL DE REFLUJO EN UN SISTEMA MICROQUIRURGICO, del 4 de Noviembre de 2010, de ALCON, INC: Aparato para controlar el reflujo en un sistema microquirúrgico , que comprende: una fuente de gas presurizado ; una cámara de aspiración […]
 CONTROL DE LA VELOCIDAD DE CAMBIO DE VACIO, del 14 de Septiembre de 2010, de KCI MEDICAL RESOURCES: Un dispositivo de terapia de heridas con vacío para aplicar presión negativa al lecho de una herida , el dispositivo de terapia de heridas […]
CONTROL DE LA VELOCIDAD DE CAMBIO DE VACIO, del 14 de Septiembre de 2010, de KCI MEDICAL RESOURCES: Un dispositivo de terapia de heridas con vacío para aplicar presión negativa al lecho de una herida , el dispositivo de terapia de heridas […]
 DEPOSITO COLECTOR PARA USO EN UN SISTEMA DE CONTROL DE BOMBA QUIRURGICA, del 11 de Enero de 2010, de BAUSCH & LOMB INCORPORATED: Un depósito colector para uso en un sistema de bomba quirúrgica, que comprende: un medidor de flujo que comprende un electroimán […]
DEPOSITO COLECTOR PARA USO EN UN SISTEMA DE CONTROL DE BOMBA QUIRURGICA, del 11 de Enero de 2010, de BAUSCH & LOMB INCORPORATED: Un depósito colector para uso en un sistema de bomba quirúrgica, que comprende: un medidor de flujo que comprende un electroimán […]
 PROCEDIMIENTO DE PRUEBA DE UN SISTEMA QUIRURGICO, del 23 de Noviembre de 2009, de ALCON, INC: Procedimiento de cebado y ajuste de un sistema quirúrgico para controlar la irrigación/aspiración y para determinar una relación de resistencia del trayecto de […]
PROCEDIMIENTO DE PRUEBA DE UN SISTEMA QUIRURGICO, del 23 de Noviembre de 2009, de ALCON, INC: Procedimiento de cebado y ajuste de un sistema quirúrgico para controlar la irrigación/aspiración y para determinar una relación de resistencia del trayecto de […]
Colector extraíble para un sistema de recogida de residuos médicos/quirúrgicos, incluyendo el colector lengüetas para la alineación del colector, del 15 de Julio de 2020, de STRYKER CORPORATION: Un colector para la conexión a una unidad de recogida de residuos médicos / quirúrgicos , teniendo la unidad de recogida de residuos […]