PROCEDIMIENTO Y DISPOSITIVO DE CONTROL DE ANGULO DE ORIENTACION DE RUEDA TRASERA DE UN VEHICULO AUTOMOVIL.
Procedimiento de control de ángulo de orientación de rueda trasera de un vehículo automóvil que comprenda un eje de ruedas delanteras directrices,
cuyo ángulo de orientación se ajuste mediante un volante, y un eje de ruedas traseras directrices, merced al cual se obtiene dicho ángulo de orientación de rueda trasera a partir de una ley de control, en función de variables de entrada que comprenden, al menos, el ángulo de rotación de dicho volante (Grad_sensor_SWA) y la velocidad (VS_kmh) de dicho vehículo, por el que se detecta la aparición de un valor erróneo de, al menos, una de dichas variables de entrada, caracterizado porque, en tal caso, se reemplaza dicho valor por un valor anterior, seguro, de dicha variable
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2006/051035.
Solicitante: RENAULT S.A.S..
Nacionalidad solicitante: Francia.
Dirección: 13-15 QUAI ALPHONSE LE GALLO,92100 BOULOGNE BILLANCOURT.
Inventor/es: GUEGAN,STEPHANE.
Fecha de Publicación: .
Fecha Concesión Europea: 20 de Enero de 2010.
Clasificación Internacional de Patentes:
- B62D7/14S
- B62D7/15G
Clasificación PCT:
- B62D6/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00).
- B62D7/15 B62D […] › B62D 7/00 Timonería de dirección; Manguetas o su montaje (B62D 13/00 tiene prioridad; dirección asistida o de relé de potencia B62D 5/00). › caracterizada por medios que modifican la relación entre los ángulos de dirección de las ruedas directrices (variando el radio automáticamente en función de las condiciones de conducción B62D 6/00).
Fragmento de la descripción:
Procedimiento y dispositivo de control de ángulo de orientación de rueda trasera de un vehículo automóvil.
La presente invención se refiere a un procedimiento de control de ángulo de orientación de rueda trasera directriz de un vehículo automóvil que comprenda un eje de ruedas delanteras directrices, cuyo ángulo de orientación se regule mediante un volante, y un eje de ruedas traseras directrices, merced al cual se obtiene dicho ángulo de orientación de rueda trasera a partir de una ley de control, en función de variables de entrada que comprenden, al menos, el ángulo de rotación del volante y la velocidad del vehículo. La presente invención se refiere también a un dispositivo para la puesta en práctica de este procedimiento y a un vehículo automóvil equipado con tal dispositivo.
Se conoce un procedimiento y un dispositivo de este tipo a partir de la solicitud de patente francesa nº 2 864 001, presentada el 18 de diciembre de 2003 por la solicitante. Este procedimiento y este dispositivo permiten pilotar el ángulo de orientación de las ruedas traseras de un vehículo automóvil denominado de cuatro ruedas directrices
que comprende un chasis soportado por un eje de dos ruedas delanteras, cuyo ángulo de orientación se regula mediante un volante de dirección manejado por el conductor del vehículo, y por un eje de dos ruedas traseras, cuyo ángulo de orientación se ajusta mediante un accionador, tal como un motor eléctrico, por ejemplo, controlado merced a un ordenador programado adecuadamente para ejecutar una ley de control de este ángulo, en función de, al menos, el ángulo de orientación de las ruedas delanteras y la velocidad del vehículo.
En caso de que estas variables de entrada de la ley de control adquieran valores erróneos, el valor de la instrucción de ángulo de orientación trasero determinada por medio de la ley de control será, también, erróneo. Puede imaginarse que, en el peor de los casos, ello pueda dar lugar a que el conductor del vehículo pierda el control del vehículo, y, por tanto, a una situación peligrosa para él y los pasajeros eventuales. Resulta necesario poner en práctica medios que permitan eliminar este riesgo.
La presente invención tiene por objeto, precisamente, proporcionar medios destinados a garantizar la seguridad del procedimiento de control mencionado.
La presente invención tiene por objeto, también, ofrecer un procedimiento de control seguro de este tipo, destinado a un vehículo automóvil dotado de una red local de comunicaciones que comprenda un bus de distribución de señales, en particular, de señales representativas de las variables de entrada de la ley de control utilizada por este procedimiento.
Se consiguen estos objetos de la invención, así como otros que se pondrán de manifiesto a partir de la lectura de la descripción que sigue, merced a un procedimiento de control de ángulo de orientación de rueda trasera de un vehículo automóvil que comprenda un eje de ruedas delanteras directrices, cuyo ángulo de orientación se regule mediante un volante, y un eje de ruedas traseras directrices, por el cual se obtiene el ángulo de orientación de rueda trasera a partir de una ley de control, en función de variables de entrada que comprenden, al menos, el ángulo de rotación de dicho volante y la velocidad de dicho vehículo, caracterizándose este procedimiento porque se detecta la aparición de un valor erróneo de, al menos, una de las variables de entrada y porque, en ese caso, se reemplaza este valor por un valor anterior, seguro, de la variable.
Al reemplazar así, en un momento determinado, el valor erróneo por un valor anterior válido y reciente, susceptible de representar correctamente el valor real, en ese momento, de la variable considerada, se permite a la ley de control generar un valor correcto del ángulo de orientación trasero, no afectado por el error detectado.
De acuerdo con otras características de la presente invención:
- si la generación del valor erróneo persiste durante un tiempo superior a un valor predeterminado, se sustituye el modo de cálculo del ángulo de orientación trasero definido mediante la ley de control por un modo de cálculo seguro de este ángulo,
- el modo de cálculo seguro devuelve, progresivamente, el ángulo de orientación trasero a cero,
- el procedimiento se pone en práctica en un vehículo equipado con una red local de comunicaciones que comprenda un bus de distribución de, al menos, dichas variables de entrada en forma de datos digitales muestreados. Cuando de detecte un valor erróneo de una muestra en curso de uno de los datos digitales, se reemplaza esta muestra por una muestra anterior segura del dato, para el cálculo del ángulo de orientación trasero por medio de la ley de control.
- se compara el valor de la muestra en curso del dato disponible en dicho bus con valores indicativos de su invalidez o de su ausencia en el bus, y se ajusta en consecuencia el valor de una bandera que señale bien dicha invalidez o bien dicha ausencia.
- durante una fase del muestreo se mide el gradiente de la velocidad del vehículo, se compara este gradiente con un valor límite predeterminado de este gradiente y se ajusta, en consecuencia, el valor de una bandera que señale una superación eventual de este valor límite,
- se mide el gradiente del ángulo de rotación del volante, se compara este gradiente con un valor límite predeterminado de este gradiente y se ajusta en consecuencia el valor de una bandera que señale una superación eventual de este valor límite,
- la medición del gradiente está sujeta a temporización,
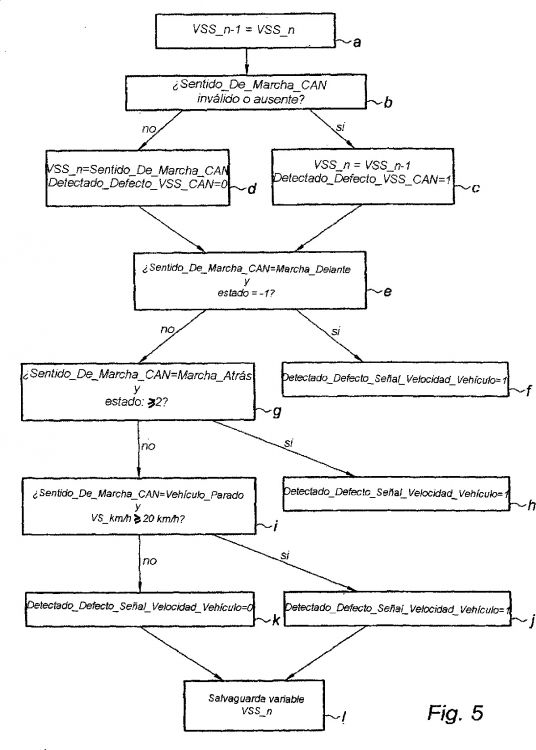
- al consistir una de las variables de entrada en el sentido de marcha del vehículo, se verifica la coherencia de esta variable, transmitida por dicho bus, con el estado del vehículo, en marcha hacia delante, en marcha hacia atrás o, también, parado, y se ajusta en consecuencia el valor de una bandera que señale un error eventual en la muestra en curso de esta variable,
- si se mantiene cualquiera de las banderas antedichas en el estado que indique un error de la variable de entrada asociada durante un tiempo superior a un valor predeterminado, se calcula el ángulo de orientación trasero merced al modo de cálculo seguro.
Para la puesta en práctica del procedimiento de la invención, está previsto un dispositivo que comprende medios destinados a ejecutar la ley de control y medios sensibles a una instrucción de ángulo de orientación trasero obtenida de acuerdo con esta ley para hacer variar este ángulo de acuerdo con esta instrucción, caracterizándose este dispositivo porque comprende medios de vigilancia de señales representativas de las variables de entrada de la ley de control, destinados a indicar un error del valor en curso de cualquiera de estas variables y a reemplazar este valor en curso por un valor anterior, seguro, de la variable.
De acuerdo con otras características de este dispositivo:
- los medios de ejecución de la ley de control comprenden medios de ejecución de un modo de cálculo seguro del ángulo de orientación trasero,
- el dispositivo comprende, además, medios de gestión de estado sensibles a la detección de un error por parte de los medios de vigilancia de señales y a las señales seguras entregadas por estos medios de vigilancia en lo que se refiere a la velocidad y al sentido de marcha del vehículo, con el fin de entregar a los medios de ejecución de la ley de control una información segura relativa al estado del vehículo, a saber, parado, en marcha hacia delante o hacia atrás, destinada a garantizar una selección adecuada de esta ley de control por parte de los medios de ejecución de esta ley,
- esta información se entrega, también, a los medios de vigilancia, que comprenden medios de verificación de la coherencia de la variable relativa al sentido de marcha del vehículo de acuerdo con dicha información.
Otras características y ventajas de la presente invención se pondrán de manifiesto a partir de la lectura de la descripción que sigue y del examen de los esquemas adjuntos, en los que:
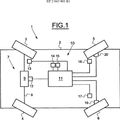
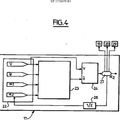
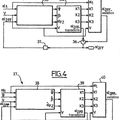
- la figura 1 muestra un diagrama de bloques del dispositivo de control de ángulo de orientación de rueda trasera de acuerdo con la presente invención,
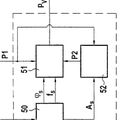
- la figura 2 muestra un diagrama funcional de un módulo denominado de gestión de estados
del diagrama de bloques de la figura 1, y
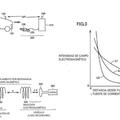
- las figuras 3, 4 y 5 muestran organigramas de programas de detección...
Reivindicaciones:
1. Procedimiento de control de ángulo de orientación de rueda trasera de un vehículo automóvil que comprenda un eje de ruedas delanteras directrices, cuyo ángulo de orientación se ajuste mediante un volante, y un eje de ruedas traseras directrices, merced al cual se obtiene dicho ángulo de orientación de rueda trasera a partir de una ley de control, en función de variables de entrada que comprenden, al menos, el ángulo de rotación de dicho volante (Grad_sensor_SWA) y la velocidad (VS_kmh) de dicho vehículo, por el que se detecta la aparición de un valor erróneo de, al menos, una de dichas variables de entrada, caracterizado porque, en tal caso, se reemplaza dicho valor por un valor anterior, seguro, de dicha variable.
2. Procedimiento conforme a la reivindicación 1, caracterizado porque si la generación de dicho valor erróneo persiste durante un tiempo superior a un valor predeterminado, se sustituye el modo de cálculo de dicho ángulo de orientación trasero, definido por dicha ley de control, por un modo de cálculo seguro de dicho ángulo.
3. Procedimiento conforme a la reivindicación 2, caracterizado porque dicho modo de cálculo seguro devuelve a cero, progresivamente, dicho ángulo de orientación trasero.
4. Procedimiento conforme a cualquiera de las reivindicaciones 1-3, puesto en práctica en un vehículo dotado de una red local de comunicaciones que comprenda un bus (1) de distribución de, al menos, dichas variables de entrada en forma de datos digitales muestreados (SWA_n, VS_n, VSS_n), caracterizado porque cuando se detecte un valor erróneo de una muestra en curso de uno de dichos datos digitales, se reemplaza dicha muestra por una muestra anterior segura (SWA_n-1, VS_n-1, VSS_n-1) de dicho dato para el cálculo de dicho ángulo de orientación trasero por medio de dicha ley de control.
5. Procedimiento conforme a la reivindicación 4, caracterizado porque se compara el valor de dicha muestra en curso de dicho dato disponible en dicho bus (1) con valores indicativos de su invalidez o su ausencia en dicho bus (1), y se ajusta en consecuencia el valor de una bandera que señale dicha invalidez o bien dicha ausencia.
6. Procedimiento conforme a cualquiera de las reivindicaciones 4-5, caracterizado porque durante una fase del muestreo se mide el gradiente de la velocidad del vehículo, se compara dicho gradiente con un valor límite predeterminado de dicho gradiente, y se ajusta en consecuencia el valor de una bandera que señale una superación eventual de dicho valor límite.
7. Procedimiento conforme a cualquiera de las reivindicaciones 4-6, caracterizado porque durante una fase del muestreo, se mide el gradiente del ángulo de rotación del volante, se compara dicho gradiente con un valor límite predeterminado de dicho gradiente, y se ajusta en consecuencia el valor de una bandera que señale una superación eventual de dicho valor límite.
8. Procedimiento conforme a cualquiera de las reivindicaciones 6-7, caracterizado porque dicha medición de dicho gradiente está sujeta a temporización.
9. Procedimiento conforme a cualquiera de las reivindicaciones 4-8, en el que una de dichas variables de entrada está constituida por el sentido de marcha de dicho vehículo, caracterizado porque se verifica la coherencia de dicha variable (Sentido_De_Marcha_CAN) transmitida por dicho bus con el estado del vehículo, en marcha hacia delante, en marcha hacia atrás o, también, a vehículo parado, y se ajusta en consecuencia el valor de una bandera que señale un error eventual de la muestra en curso de dicha variable.
10. Procedimiento conforme a cualquiera de las reivindicaciones 4-9, caracterizado porque si se mantiene cualquiera de dichas banderas en el estado que indique un error de la variable de entrada asociada durante un tiempo superior a un valor predeterminado, se calcula dicho ángulo de orientación trasero mediante dicho modo de cálculo seguro.
11. Dispositivo caracterizado por la puesta en práctica del procedimiento conforme a cualquiera de las reivindicaciones 1 a 10, que comprende medios (4) destinados a ejecutar dicha ley de control y medios (5) sensibles a una instrucción de ángulo de orientación trasero obtenida a partir de dicha ley para hacer variar dicho ángulo de acuerdo con dicha instrucción, caracterizado porque comprende medios (6) de vigilancia de señales representativas de las variables de entrada de dicha ley de control, destinados a señalar un error del valor en curso de cualquiera de dichas variables y a reemplazar dicho valor en curso por un valor anterior, seguro, de dicha variable.
12. Dispositivo conforme a la reivindicación 11, caracterizado porque dichos medios (4) de ejecución de dicha ley de control comprenden medios de ejecución de un modo de cálculo seguro de dicho ángulo de orientación trasero.
13. Dispositivo conforme a cualquiera de las reivindicaciones 11-12, caracterizado porque comprende medios (7) de gestión de estado sensibles a la detección de un error por parte de dichos medios (6) de vigilancia de dichas señales y a las señales seguras entregadas por dichos medios (6) en lo que se refiere a la velocidad y al sentido de marcha de dicho vehículo, con el fin de entregar a los medios (4) de ejecución de dicha ley de control una información segura relativa al estado del vehículo, a vehículo parado, en marcha hacia delante o hacia atrás, destinada a garantizar una selección adecuada de dicha ley de control por parte de dichos medios (4) de ejecución de dicha ley.
14. Dispositivo conforme a la reivindicación 13, caracterizado porque dicha información se entrega, también, a dichos medios de vigilancia (6), que, a su vez, comprenden medios de verificación de la coherencia de la variable (Sentido_De_Marcha_CAN), relativa al sentido de marcha del vehículo, con dicha información.
15. Vehículo automóvil equipado con un dispositivo conforme a cualquiera de las reivindicaciones 11 a 14.
Patentes similares o relacionadas:
 DIRECCION DE EJE TRASERO PARA UNA GRUA DE VEHICULO, del 14 de Abril de 2010, de TEREX DEMAG GMBH: Dirección de eje trasero para una grúa de vehículo, que presenta al menos un eje trasero dirigido activamente con ruedas dispuestas en el mismo, que comprende:
- […]
DIRECCION DE EJE TRASERO PARA UNA GRUA DE VEHICULO, del 14 de Abril de 2010, de TEREX DEMAG GMBH: Dirección de eje trasero para una grúa de vehículo, que presenta al menos un eje trasero dirigido activamente con ruedas dispuestas en el mismo, que comprende:
- […]
PROCEDIMIENTO DE ACCIONAMIENTO DE UN VEHÍCULO DE CUATRO RUEDAS DIRECTRICES CON LA AYUDA DE UN DISPOSITIVO DE FRENADO INDIVIDUAL DE LAS RUEDAS, del 4 de Febrero de 2011, de RENAULT S.A.S.: Procedimiento de accionamiento de un vehículo, que comprende las etapas - cuando se detecta que la desviación sobrepasa un umbral predeterminado, […]
 DISPOSITIVO Y PROCEDIMIENTO DE VIGILANCIA DEL CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ, del 10 de Diciembre de 2010, de RENAULT SAS: Procedimiento de vigilancia del control del giro de rueda trasera directriz para un vehículo con al menos tres ruedas directrices, en el cual se compara una consigna de giro […]
DISPOSITIVO Y PROCEDIMIENTO DE VIGILANCIA DEL CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ, del 10 de Diciembre de 2010, de RENAULT SAS: Procedimiento de vigilancia del control del giro de rueda trasera directriz para un vehículo con al menos tres ruedas directrices, en el cual se compara una consigna de giro […]
 PROCEDIMIENTO Y SISTEMA DE CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ Y VEHICULO ASI EQUIPADO, del 1 de Diciembre de 2010, de RENAULT S.A.S.: Procedimiento de control del giro de rueda trasera directriz para un vehículo al menos con tres ruedas directrices, en el cual se estima […]
PROCEDIMIENTO Y SISTEMA DE CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ Y VEHICULO ASI EQUIPADO, del 1 de Diciembre de 2010, de RENAULT S.A.S.: Procedimiento de control del giro de rueda trasera directriz para un vehículo al menos con tres ruedas directrices, en el cual se estima […]
 PROCEDIMIENTO Y SISTEMA DE COMANDO DEL GIRO DE LA RUEDA TRASERA DIRECTRIZ Y VEHICULO CORRESPONDIENTE, del 3 de Noviembre de 2010, de RENAULT S.A.S.: Procedimiento de comando del giro de la rueda trasera directriz para un vehículo de por lo menos tres ruedas directrices, en el cual se elabora […]
PROCEDIMIENTO Y SISTEMA DE COMANDO DEL GIRO DE LA RUEDA TRASERA DIRECTRIZ Y VEHICULO CORRESPONDIENTE, del 3 de Noviembre de 2010, de RENAULT S.A.S.: Procedimiento de comando del giro de la rueda trasera directriz para un vehículo de por lo menos tres ruedas directrices, en el cual se elabora […]
 PROCEDIMIENTO Y DISPOSITIVO PARA ESTABILIZAR UN VEHICULO, del 2 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para la estabilización de un vehículo de carretera , en particular de un vehículo de pasajeros, con un remolque , el cual es arrastrado […]
PROCEDIMIENTO Y DISPOSITIVO PARA ESTABILIZAR UN VEHICULO, del 2 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para la estabilización de un vehículo de carretera , en particular de un vehículo de pasajeros, con un remolque , el cual es arrastrado […]
 Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Procedimiento para el control de la dirección y el comportamiento de un vehículo, del 13 de Noviembre de 2019, de Sentient IP AB: Un procedimiento para controlar un accionador de par de torsión de retroalimentación y al menos un accionador de guiñada y/o del estado lateral del vehículo, tal como […]