METODO Y SISTEMA DE FORMACION DE IMAGENES DE VISION NOCTURNA MONTADO EN VEHICULO.
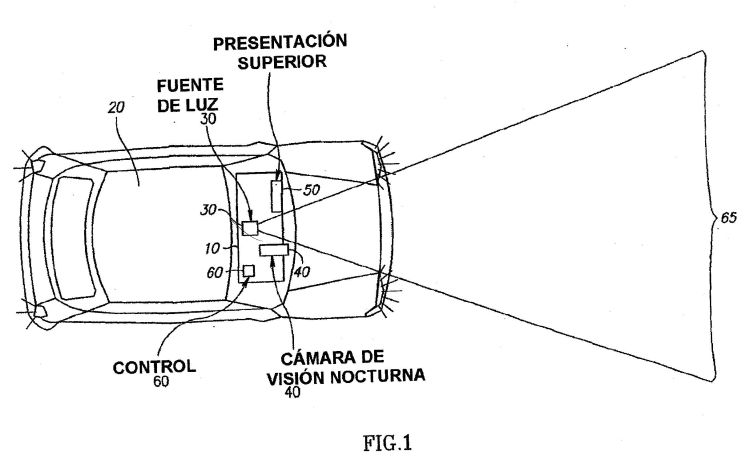
Un sistema (10) de formación de imágenes, para montar sobre un vehículo (20),
que comprende: una fuente (30) de luz, para proporcionar una energía de luz en forma de impulsos, definiendo dicha energía de luz en forma de impulsos una anchura sustancial Tlaser del impulso, y una cámara (40) para recibir dicha energía de luz en forma de impulsos, reflejada desde los objetos, pudiendo funcionar dicha cámara con una detección conmutada de dicha energía de luz en forma de impulsos, reflejada desde los objetos situados dentro de la profundidad de campo del que se desea formar imágenes, teniendo dicha profundidad de campo un alcance mínimo Rmin, comenzando dicha cámara a detectar energía de luz tras un tiempo de retardo, sustancialmente dado por el tiempo que tarda la anchura sustancial del impulso de dicha energía de luz en forma de impulso, en alcanzar dicho alcance mínimo y en volver completando la reflexión a dicha cámara desde dicho alcance mínimo; estando dicho sistema caracterizado porque: dicha detección conmutada de dicha energía de luz en forma de impulso, reflejada desde los objetos, define un intervalo de tiempo de conexión (ON), TII, durante el cual dicha cámara recibe reflexiones de los objetos, un intervalo de tiempo de desconexión (OFF), Toff, entre dos intervalos de tiempo de conexión contiguos, durante el cual dicha cámara no recibe reflexiones desde los objetos, y un tiempo de sincronización entre dicho intervalo de tiempo de conexión y el tiempo en que dicha energía de luz en forma de impulso se refleja desde los objetos situados dentro de dicha profundidad de campo del que se toman las imágenes; en el que dicho tiempo de sincronización define la cantidad de solapamiento entre dicho intervalo de tiempo de conexión y dicha energía de luz en forma de impulso reflejada desde los objetos, y pudiendo funcionar dicha cámara de manera que crea una sensibilidad en función de un alcance para dicho sistema de formación de imágenes, a través de dicho tiempo de sincronización, de forma tal que dicho solapamiento entre dicha energía de luz en forma de impulso, reflejada desde los objetos, y dicho intervalo de tiempo de conexión, aumenta en función del alcance hasta un alcance óptimo, R 0, de dicha profundidad de campo del que se toman imágenes, aumentando así la parte de dicha anchura sustancial del impulso de dicha energía de luz en forma de impulso, reflejada desde los objetos situados entre dicho alcance mínimo y dicho alcance óptimo que alcanza dicha cámara durante el intervalo de tiempo de conexión.
Tipo: Resumen de patente/invención.
Solicitante: ELBIT SYSTEMS LTD..
Nacionalidad solicitante: Israel.
Dirección: ADVANCED TECHNOLOGY CENTER, P.O. BOX 539,HAIFA 31053.
Inventor/es: DAVID,OFER, BORENSTEIN,YEHUDA.
Fecha de Publicación: .
Fecha Concesión Europea: 20 de Febrero de 2008.
Clasificación PCT:
- G01S17/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › que utilizan la transmisión de ondas discontinuas moduladas por pulsos (determinación de la distancia mediante mediciones de fase G01S 17/32).
- G01S17/93 G01S 17/00 […] › como anti-colisión.
- G02B23/12 G […] › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › G02B 23/00 Telescopios o lentes de aproximación, p. ej. gemelos (telescopios de medida G01B 9/06 ); Periscopios; Instrumentos para ver el interior de cuerpos huecos (instrumentos de diagnóstico A61B ); Visores (objetivos G02B 9/00, G02B 11/00, G02B 15/00, G02B 17/00; oculares G02B 25/00 ); Apuntado óptico o aparatos de mira (aspectos no ópticos de apuntado de armas o de aparatos de mira F41G). › con medios para invertir o intensificar la imagen (objetivos para invertir o intensificar la imagen G02B 13/16; convertidores de imagen eléctricos con dispositivos ópticos de entrada y de salida H01J 31/50).
Patentes similares o relacionadas:
Procedimiento para la detección y localización de un garaje y vehículo, del 6 de Mayo de 2020, de AUDI AG: Procedimiento para la detección y localización de al menos un garaje que ofrezca una plaza de aparcamiento para un vehículo en el vehículo , en donde el vehículo […]
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
Método para procesar pulsos de eco de un sensor láser 3d activo para proporcionar mediciones de distancia, del 24 de Julio de 2019, de HENSOLDT Sensors GmbH: Un método para procesar pulsos de eco de un sensor 3D activo para proporcionar mediciones de distancia del entorno frente al sensor, que comprende las siguientes […]
Sistema de seguimiento dinámico y método de guiado automático basado en cámaras 3D de tiempo de vuelo, del 3 de Abril de 2019, de Terabee S.A.S: Un sistema [Fig. 1, ] de seguimiento dinámico que comprende: - una cámara [Fig. 1, ] tridimensional basada en tecnología de tiempo […]
 Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento y disposición para desarrollar un modelo tridimensional de un entorno, del 13 de Diciembre de 2018, de Vricon Systems Aktiebolag: Procedimiento para desarrollar un modelo 3D de un entorno, que comprende las etapas de: proporcionar una pluralidad de imágenes superpuestas del entorno […]
Luna con campo sensor ópticamente transparente, del 1 de Junio de 2016, de SAINT-GOBAIN GLASS FRANCE: Luna en forma de luna de parabrisas, o bien de una luna trasera de un vehículo, con un campo sensor ópticamente transparente, comprendiendo: a) al menos una […]
 Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]
Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]