SISTEMA DE LANZAMIENTO Y ATERRIZAJE DE UN VEHÍCULO AÉREO NO TRIPULADO.
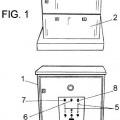
Un sistema (10) para aterrizaje de UAV's (15), que comprende una estructura de catapulta (25) que incluye un brazo central (26);
y un medio de eje (45) instalado a lo largo de dicho brazo central de dicha estructura y en el cual el mismo hace posible que dicho brazo central (26) se mueva alrededor de él;
y medios de base (50) que conectan dicho medio de eje (45) a una plataforma (20) en la cual puede instalarse dicho sistema; y un ensamblaje (35), formado esencialmente como una pieza sustancialmente en forma de Y que puede instalarse sobre dicho extremo superior de dicho brazo central (26) de dicha estructura (25);
y un medio extensible elástico (30) instalado de modo extendido en una separación entre los dos brazos (39, 41) de dicho ensamblaje (35) y ajustado para conexión con un UAV que está aterrizando (15);
que se caracteriza porque el mismo comprende además un medio controlado de tracción y frenado (55) que conecta entre el extremo inferior de dicho brazo central (26) de dicha estructura (25) y dicha plataforma (20) sobre la cual puede instalarse dicho sistema (10); y en el cual, en dicha fase de aterrizaje, dicho medio controlado de tracción y frenado (55) frena esencialmente el movimiento de dicho brazo central (26) de dicha estructura (25) que está propulsada para girar alrededor del medio de eje de dicho sistema (45), desde el momento en que dicho UAV (15) hace contacto con dicho medio elástico (30) y con el cual propulsa dicha estructura (25) para moverse alrededor de dicho medio de eje (45).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IL2007/000488.
Solicitante: ELBIT SYSTEMS LTD..
Nacionalidad solicitante: Israel.
Dirección: P.O. BOX 1165 76111 REHOVOT ISRAEL.
Inventor/es: KARIV,Amnon.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64F1/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64F INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › B64F 1/00 Instalaciones en tierra o instalaciones en cubierta de portaaviones (adaptadas especialmente para aeronaves cautivas B64F 3/00). › Dispositivos de frenado; Barreras líquidas.
- B64F1/04 B64F 1/00 […] › Dispositivos de lanzamiento o de remolque.
- B64F1/08 B64F 1/00 […] › utilizando cabrias.
PDF original: ES-2375791_T3.pdf
Fragmento de la descripción:
Sistema de lanzamiento y aterrizaje de un vehículo aéreo no tripulado Campo de la Invención La presente invención se refiere al campo de los sistemas para lanzamiento y aterrizaje de aeronaves en general, y específicamente a sistemas para el lanzamiento de Vehículos Aéreos no tripulado (en lo sucesivo UAV) desde una plataforma móvil o estacionaria en los cuales esta plataforma tiene dimensiones relativamente pequeñas (por ejemplo, un barco, un camión, un área vallada) y el aterrizaje de los mismos en ella una vez finalizado su vuelo.
Antecedentes de la Invención
En el curso de los últimos años, el alcance de la utilización de UAV's ha aumentado y se ha expandido notablemente, particularmente para funciones militares. Por regla general, las limitaciones impuestas en la utilización de los UAV se deben al requerimiento de emplear una pista suficientemente larga para sus "despegues" (es decir, lanzamientos) y aterrizajes.
Al mismo tiempo, ha surgido la necesidad de un nuevo enfoque operativo, que requiere una permanencia larga en el aire de uno o más UAV volando sobre un sector de interés geográfico dado, por ejemplo -a fin de localizar un objetivo en dicho sector definido y guiar un arma hacia el objetivo. Otros ejemplos son tales como -la utilización del UAV como señuelo para una misión táctica de reconocimiento.
Esta es una necesidad operativa, de la que se deriva un requerimiento para lanzar UAV's con recuperación rápida y segura de los mismos en alto grado y condiciones de seguridad, de un modo que permita su uso repetido. Además, la asimilación de los servicios de UAV's conduce al requerimiento de que la operación de los mismos sea posible no sólo desde pistas de aterrizaje sistemáticas, como se ha dicho, sino también desde plataformas móviles dotadas de dimensiones relativamente pequeñas. Por ejemplo, desde las cubiertas de barcos lanzacohetes, fragatas y corbetas, en donde la utilización del UAV es el equivalente de elevar sus mástiles (sustituto de mástil alto) proporciona vigilancia más allá del horizonte, a fin de que un UAV lanzado sobre un barco proporciona capacidad de observación hasta un alcance de 50 a 100 millas.
Adicionalmente, las áreas urbanas en las cuales están teniendo lugar en la actualidad conflictos armados, conducen al requerimiento de que pudieran estar disponibles UAV's operativos desde un espacio urbano limitado en tierra y no precisamente desde una pista de aterrizaje de gran área.
Diversos sistemas y métodos se han ofrecido en el pasado a fin de impartir capacidad de lanzamiento y aterrizaje de UAV's desde plataformas móviles, tales como barcos, como se ha indicado arriba.
Una patente de Estados Unidos, US 3.980.259 -Aircraft Recover y Methods, describe un sistema para aterrizaje de un RPV (vehículo pilotado a distancia) sobre una plataforma móvil (por ejemplo un barco) utilizando un paracaídas de planeo que se extiende sobre el vehículo aéreo y un cable que se suelta desde el RPV y se engancha subsiguientemente a la plataforma; el cable sirve para tirar del RPV hacia la plataforma (de manera similar a la recuperación de una cometa) .
Un "aparato de recuperación de vehículos aéreos a bordo" se describe en la patente US 4.753.400. El dispositivo descrito en esta patente está basado en un paracaídas con fuerza de sustentación y un paracaídas de red que está unido al mismo, estando conectados ambos al barco con un cable. El paracaídas de elevación estabiliza el paracaídas de red, estando unido el mismo por el cable al barco. El vehículo no pilotado se conduce hasta el paracaídas de red y, después de su colisión con el paracaídas de red y haberse hecho aterrizar en el mismo, el cable se recoge y se enrolla en el barco.
La patente US 4.790.497 describe un "método de aterrizaje puntual para despegue y aterrizaje no verticales de objetos volantes". Este método está basado en la fijación -durante el vuelo, de un cable desde el vehículo volante a un medio de anclaje, y subsiguientemente la tracción del vehículo en vuelo hasta el punto de aterrizaje designado utilizando un cabrestante durante el curso del vuelo continuo del vehículo.
La patente de Estados Unidos US 5.109.788 describe un "aparato para recuperación de una aeronave no tripulada reutilizable". El objeto de esta patente es un dispositivo semejante a un trampolín que se abre y se extiende en el exterior de la plataforma móvil (por ejemplo, la pared de un barco) con objeto de la toma de tierra del vehículo aéreo en el barco.
La patente US 6.874.729 describe un "sistema de lanzamiento y recuperación de un vehículo aéreo no tripulado". El sistema lanza el vehículo aéreo elevándolo con empleo de un paracaídas de planeo y soltándolo una vez en el aire – del paracaídas de planeo que está unido a la plataforma móvil (por ejemplo, un barco) . En una configuración preferida del sistema que se describe en la patente, el sistema recupera incluso el vehículo aéreo y lo hace aterrizar en una red que está extendida en el aire (a una altura predeterminada) utilizando un sistema que comprende un cable y el paracaídas de planeo.
La solicitud de patente EP 1.602.576 describe un "sistema de desaceleración de vehículo aéreo no tripulado" que está basado en la amortiguación de la toma de tierra de un UAV por propulsión de un dispositivo de frenado contra el cual choca el UAV (por ejemplo un dispositivo semejante a una red) , en la dirección del vuelo del UAV y en la fuerza de la colisión (del UAV en la red) , hasta que se detiene el UAV. La mayor parte de la energía cinética es absorbida durante el proceso debido a la resistencia al avance aerodinámica que es generada por el dispositivo móvil de frenado.
El documento DE 4.301.671, que se considera representa el estado más relevante de la técnica y describe todas las características del preámbulo de la reivindicación independiente 1, muestra un ensamblaje para recuperación de vehículos aéreos.
Todos los sistemas y métodos arriba citados no imparten una solución adecuada al problema presentado por el requerimiento táctico de lanzamiento y aterrizaje a gran velocidad de un UAV desde y sobre una plataforma móvil cuyas dimensiones son relativamente pequeñas (por ejemplo, un barco) como se ha indicado, que es realmente el problema presentado por los requerimientos operativos citados.
En realidad, el lanzamiento de un UAV podría verse ayudado por un dispositivo pirotécnico (tal como un cohete de aceleración) que se agota y es abandonado lejos del UAV después de su lanzamiento, pero aún más que el riesgo ambiental generado por un dispositivo de este tipo y sus costes relativamente altos, quedaría todavía por resolver el problema de la recuperación del vehículo aéreo.
El aterrizaje de un UAV por fijación del vehículo aéreo a un cable que se suelta desde el UAV, enviando hacia arriba un paracaídas de planeo desde la plataforma o el establecimiento de medios de red sobre la plataforma, como se describían en los documentos de patente citados anteriormente, no proporcionan todavía una solución adecuada. La implementación de soluciones como las presentadas exige emplear equipos operativos dotados de alta experiencia y de aptitudes especializadas, combinadas con un aumento de las dimensiones y la característica de identificación de la plataforma móvil -que conducen a un mayor riesgo de ser detectada combinado con la posible interferencia hasta su inutilización -con la operación de las armas y el equipo de vigilancia a bordo de la plataforma (debido al despliegue de cables, paracaídas y análogos en estrecha proximidad a bordo de la plataforma) .
Así pues, en el periodo anterior a la presente invención, existía la necesidad largamente sentida y continuada de un sistema compacto de aterrizaje y lanzamiento de UAV's que se caracterice por sus pequeñas dimensiones, que sea instalable sobre una plataforma móvil relativamente pequeña (por ejemplo, un lancha lanzamisiles) , estando al mismo tiempo integrado con los sistemas de armamento y detección a bordo de estas plataformas por una parte, pero sin interferir con sus modos y equipo de batalla operativos, culminando en un sistema de lanzamiento y aterrizaje que sea fácil de mantener y operar y que imparta capacidad de lanzamiento y aterrizaje a UAV's de gran velocidad y con características notables de fiabilidad y seguridad.
Sumario de la presente invención La presente invención, en su configuración esencial más básica, permite el aterrizaje de un UAV por medio de un dispositivo... [Seguir leyendo]
Reivindicaciones:
1. Un sistema (10) para aterrizaje de UAV's (15) , que comprende una estructura de catapulta (25) que incluye un brazo central (26) ; y un medio de eje (45) instalado a lo largo de dicho brazo central de dicha estructura y en el cual el mismo hace posible que dicho brazo central (26) se mueva alrededor de él; y medios de base (50) que conectan dicho medio de eje (45) a una plataforma (20) en la cual puede instalarse dicho sistema; y un ensamblaje (35) , formado esencialmente como una pieza sustancialmente en forma de Y que puede instalarse sobre dicho extremo superior de dicho brazo central (26) de dicha estructura (25) ; y un medio extensible elástico (30) instalado de modo extendido en una separación entre los dos brazos (39, 41) de dicho ensamblaje (35) y ajustado para conexión con un UAV que está aterrizando (15) ; que se caracteriza porque el mismo comprende además un medio controlado de tracción y frenado (55) que conecta entre el extremo inferior de dicho brazo central (26) de dicha estructura (25) y dicha plataforma (20) sobre la cual puede instalarse dicho sistema (10) ; y en el cual, en dicha fase de aterrizaje, dicho medio controlado de tracción y frenado (55) frena esencialmente el movimiento de dicho brazo central (26) de dicha estructura (25) que está propulsada para girar alrededor del medio de eje de dicho sistema (45) , desde el momento en que dicho UAV (15) hace contacto con dicho medio elástico (30) y con el cual propulsa dicha estructura
(25) para moverse alrededor de dicho medio de eje (45) .
2. Un sistema (10) para aterrizaje de UAV's (15) de acuerdo con la reivindicación 1, que se caracteriza porque en el mismo dicho sistema es un sistema de uso dual, un mismo sistema simple (único) , exclusivamente con cambios menores que pueden realizarse en el sitio de lanzamiento, sirve a la vez para aterrizaje de dichos UAV's y para lanzamiento de los mismos, dicho ensamblaje en forma de Y (35) pudiendo instalarse de una manera desmontable en dicho extremo superior de dicho brazo central (26) de dicha estructura (25) y se desmonta de dicho extremo superior de dicho brazo central (26) de dicha estructura (25) antes de operar el sistema en su modo de aterrizaje de UAV's; y en el cual -en el curso de la operación del sistema en su modo de lanzamiento de UAV's -el sistema incluye además un medio de transporte (235) que está instalado de manera desmontable en un extremo superior de dicho brazo central (26) de dicha estructura (25) y el UAV (15) destinado a ser lanzado se encuentra conectado a dicho medio de transporte (235) de modo desmontable; y por el cual en dicho curso de lanzamiento, dicho medio de tracción y frenado controlado (55) tira de dicho brazo central (26) de dicha estructura (25) e impulsa la estructura
(25) en un movimiento de rotación alrededor de dicho medio de eje (45) , de tal manera que dicho medio de transporte (235) imparte una velocidad al UAV (15) que está acoplado al mismo, en una dirección que es tangencial al movimiento de rotación de la estructura (25) y de tal magnitud que hace posible al menos la separación del UAV
(15) del medio de transporte (235) y que el mismo despegue al aire.
3. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 1, que se caracteriza porque en el mismo dichos brazos (39, 41) de dicho ensamblaje (35) , entre cuyos brazos (39, 41) está instalado dicho medio extensible elástico (30) , incluyen -cada uno de ellos, un sector elástico plegable después de la extensión de dicho medio elástico (30) que está conectado al mismo.
4. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 1, que se caracteriza porque el mismo incluye adicionalmente un medio de amortiguación y frenado acoplado a dicho medio elástico (30) ; o en el cual dicha estructura (25) incluye al menos un componente de diseño telescópico, de tal manera que hace posible reducir las dimensiones de dicha estructura (25) en los casos en que dicho sistema (10) no se encuentra en su modo que hace posible el lanzamiento ni el aterrizaje; o en el cual dicho medio de base (50) incluye un componente telescópico de tal manera que hace posible reducir las dimensiones de dicho sistema (10) en los casos en que dicho sistema no se encuentra en su modo que hace posible el lanzamiento ni el aterrizaje.
5. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 1, que se caracteriza porque en el mismo dicho medio extensible elástico (30) es un cable de detención (31) .
6. Un sistema (10) para lanzamiento de UAV's (15) , de acuerdo con la reivindicación 5, que se caracteriza porque en el mismo dicho acto de conexión de dicho cable de detención (31) con dicho UAV (15) se realiza en los momentos de dicho aterrizaje, por utilización de un dispositivo de enganche (470) que sobresale de dicho UAV (15) y cuya abertura está dirigida esencialmente hacia su dirección de vuelo y es adecuada por sus dimensiones para conducir dicho cable de detención (31) hacia ella, y un dispositivo elástico inmovilizable (474) en dicho dispositivo de enganche (470) asegura que desde el momento en que dicho cable de detención (31) ha sido atrapado en dicho dispositivo de enganche (470) , ya no puede liberarse del mismo, excepto sujeto al desprendimiento de dicho inmovilizador elástico (474) .
7. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 1, que se caracteriza porque en el mismo dicho medio extensible elástico (30) es una red de detención.
8. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 1, que se caracteriza porque en el mismo dicho sistema (10) incluye adicionalmente un medio de frenado y amortiguación que está integrado con dicho medio de eje (45) de manera tal que durante dicho modo de aterrizaje el mismo rompe y amortigua dicho movimiento de dicha estructura (25) alrededor de dicho medio de eje (45) .
9. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 8, que se caracteriza porque en el mismo dicho medio de frenado y amortiguación es un tipo de amortiguador viscoso.
10. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 1, que se caracteriza porque en el mismo dicho medio de tracción y frenado controlado (55) comprende un medio de cabrestante propulsado (80) ; y un cable (82) que está conectado en uno de sus extremos a dicho medio de cabrestante (80) y en su segundo extremo a dicho extremo inferior de dicho brazo central (26) de dicha estructura (25) , de tal manera que durante dicha operación en modo de aterrizaje, dicho cable (82) frena dicho movimiento de dicho brazo central (25) de dicha estructura (26) .
11. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 10, que se caracteriza porque en el mismo dicho medio de cabrestante (80) está impulsado por la acción de un motor eléctrico o de potencia neumática o hidráulica o por un mecanismo cargado a resorte.
12. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 1, que se caracteriza porque el mismo comprende adicionalmente dicho sistema un medio de equilibración (90) instalado en dicho extremo inferior de dicho brazo central (26) de dicha estructura (25) , de tal modo que en los casos en que dicho sistema (10) no se encuentra en su modo que hace posible el aterrizaje, dicha estructura puede equilibrarse manualmente, de tal manera que haga posible reducir las dimensiones en altura de dicho sistema (10) y proporcionando acceso fácil a dicho extremo superior de dicho brazo central (26) de dicha estructura (25) ; o, en el cual, dicho medio de base (50) comprende un escalón (51) que hace posible estabilizar dicho sistema (10) con relación a los movimientos de dicha plataforma (20) sobre la cual está instalado el mismo, al menos en un grado de libertad; o, en el cual, dicho medio de base (50) está posicionado sobre un medio de eje que puede estar sometido a un movimiento de accionamiento controlado que hace posible impulsar dicho medio de base (50) en un plano opuesto al plano de movimiento de dicho medio axial (45) ; y, en el cual, dicho medio axial (45) puede someterse también a un movimiento de accionamiento controlado, de tal modo que dicho sistema (10) puede estabilizarse en dos grados de libertad.
13. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 1, que se caracteriza porque en el mismo dicho sistema incluye adicionalmente un medio de autoguiado (95) a fin de conducir dicho UAV (15) hacia dicho medio elástico (30) .
14. Un sistema (10) para aterrizaje de UAV's (15) , de acuerdo con la reivindicación 13, que se caracteriza porque en el mismo dicho medio de autoguiado (95) incluye una antena (96) que puede instalarse en dirección opuesta orientada hacia dicha separación (36) entre dichos brazos (39, 41) de dicho ensamblaje (35) .
Referencias citadas en la descripción
Esta lista de referencias citadas por el solicitante es para comodidad del lector únicamente. No forma parte del documento de la patente europea. Aun cuando se tuvo gran cuidado al reunir las referencias, no se pueden excluir errores u omisiones y la Oficina Europea de Patentes (EPO) declina toda responsabilidad a este respecto.
Documentos de patente citados en la descripción
• US 3980259 A [0007]
• US 4753400 A [0008]
• US 4790497 A [0009]
• US 5109788 A [0010]
• US 6874729 B [0011]
• EP 1602576 A [0012]
• DE 4301671 [0013]
Patentes similares o relacionadas:
Sistema de orientación de un dron, del 2 de Octubre de 2019, de PARADOX ENGINEERING SA: Sistema de orientación para un dron , que comprende: - una pluralidad de dispositivos que se interconectan en una red inalámbrica […]
Material absorbente de energía en capas suspendido para sistemas de detención de vehículos, del 10 de Abril de 2019, de ENGINEERED ARRESTING SYSTEMS CORPORATION: Estructura en capas de sistema de detención de vehículos, que comprende: al menos una parte superior suspendida de material absorbente de energía […]
Dispositivo de aterrizaje para el aterrizaje de un avión cargado en el sentido de la envergadura, del 30 de Octubre de 2018, de Airbus Defence and Space GmbH: Un dispositivo de aterrizaje para el aterrizaje de un avión sobre el mismo, comprendiendo el dispositivo de aterrizaje […]
Aridos estabilizados y otros materiales y estructuras para finalidades que incluyen, pero no se limitan, a la absorción de energía, del 21 de Marzo de 2018, de ENGINEERED ARRESTING SYSTEMS CORPORATION: Estructura de absorción de energía para frenar una aeronave que se desplaza a lo largo de una superficie de una pista de aterrizaje, configurada dicha estructura de absorción […]
Unidades de detención de vehículos resistentes al impacto de chorros de reactores y provistas de cubierta, lecho y métodos de fabricación, del 24 de Agosto de 2016, de ENGINEERED ARRESTING SYSTEMS CORPORATION: Una unidad de detención de vehículos susceptible de utilizarse para la detención de un vehículo, que comprende: i) un bloque de material compresible, que tiene […]
Lecho de intercepción para vehículos, del 18 de Mayo de 2016, de NORSK GLASSGJENVINNING AS: Sistema de intercepción de vehículos, en el que el sistema comprende: - una zona de intercepción de vehículos que comprende un lecho relleno de […]
 Armario modular para control y monitorización del sistema de levantamiento de barreras de frenado, del 27 de Agosto de 2015, de CONSULTORIA Y CALIBRACIÓN S.L: 1. Armario modular para control y monitorización del sistema de levantamiento de barreras de frenado, previsto para controlar la operación de levantamiento […]
Armario modular para control y monitorización del sistema de levantamiento de barreras de frenado, del 27 de Agosto de 2015, de CONSULTORIA Y CALIBRACIÓN S.L: 1. Armario modular para control y monitorización del sistema de levantamiento de barreras de frenado, previsto para controlar la operación de levantamiento […]
 Sistema de recuperación de vehículos aéreos no tripulados, del 18 de Abril de 2012, de THE BOEING COMPANY: Sistema de recuperación de un vehículo aéreo no tripulado en vuelo, que comprende un vehículo aéreo no tripulado y un aparato de recuperación (30; 60; […]
Sistema de recuperación de vehículos aéreos no tripulados, del 18 de Abril de 2012, de THE BOEING COMPANY: Sistema de recuperación de un vehículo aéreo no tripulado en vuelo, que comprende un vehículo aéreo no tripulado y un aparato de recuperación (30; 60; […]