ROBOT CON VISION ARTIFICIAL PARA ENCOLADO AUTOMATICO DE SUELAS DE ZAPATO.
Robot con visión artificial para encolado automático de suelas de zapato.
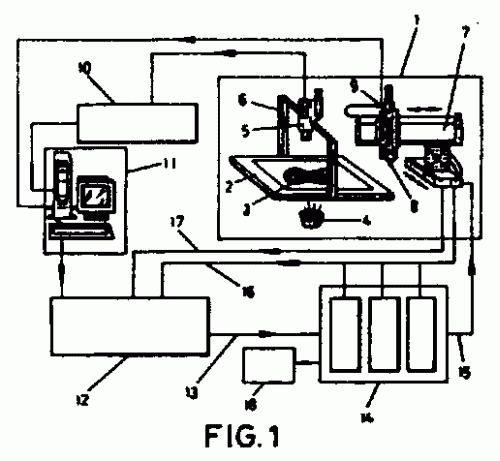
Cuenta con un manipulador cartesiano de tres ejes (7) dotado de una pistola de encolado (8) y adyacente a una superficie de trabajo (2) donde se ubica la suela a encolar (3). Bajo dicha superficie (2) hay un sistema de iluminación (4) y sobre ella hay una cámara (5) conectada a una tarjeta de adquisición de imágenes (10) que a su vez conecta con una unidad de control (11). La unidad de control (11) conecta además con una tarjeta de control de motores (12) que a través de amplificadores (14) hace moverse al manipulador (7) según las coordenadas y trayectorias, definidas por la tarjeta de adquisición de imágenes (10) y correspondientes al contorno de la suela (3).
Tipo: Resumen de patente/invención.
Solicitante: UNIVERSIDAD DE MURCIA.
Nacionalidad solicitante: España.
Provincia: MURCIA.
Inventor/es: TOMAS BALIBREA,LUIS MANUEL, MATEO AROCA,ANTONIO.
Fecha de Solicitud: 4 de Agosto de 1997.
Fecha de Publicación: .
Fecha de Concesión: 7 de Febrero de 2001.
Clasificación Internacional de Patentes:
- A43D25/06 NECESIDADES CORRIENTES DE LA VIDA. › A43 CALZADOS. › A43D MAQUINAS, HERRAMIENTAS, EQUIPOS O PROCEDIMIENTOS PARA LA FABRICACION O LA REPARACION DEL CALZADO (costura D05B). › A43D 25/00 Dispositivos para el encolado de las distintas partes del calzado. › Dispositivos para el encolado de las suelas a la base del calzado (A43D 25/18, A43D 25/20 tienen prioridad).
- B25J13/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › por medio de dispositivos sensores, p. ej. a la visión o al tacto.
- B25J9/02 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático, del 12 de Febrero de 2020, de Modula S.p.A: Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal […]
SISTEMA AUTOMÁTICO PARA GRANALLADO DE PIEZAS, del 24 de Octubre de 2019, de ESEKI, S.A.L: El sistema de la invención, partiendo de un brazo robótico de granallado convencional, centra sus características en que el mismo en vez de presentar una posición […]
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Sistema de construcción robotizado que comprende un robot cartesiano que puede ser elevado de manera automática según la construcción va ganando altura, que […]
ROBOT PARA REFORMAS Y REHABILITACIONES, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para reformas y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros paralelos fijos, verticales o longitudinales, […]
SISTEMA AUTOMÁTICO PARA GRANALLADO DE PIEZAS, del 17 de Octubre de 2019, de ESEKI, S.A.L: Sistema automático para el granallado de piezas. El sistema de la invención, partiendo de un brazo robótico de granallado convencional, centra sus características […]
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO., del 10 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Sistema de construcción robotizado que comprende un robot cartesiano tipo pórtico que puede ser elevado de manera automática según la construcción va ganando altura, que cuenta […]