UN METODO DE MEDIR LA RIGIDEZ, EL COEFICIENTE DE AMORTIGUACION Y LA INERCIA DE UN SISTEMA.
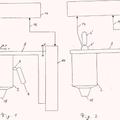
METODO PARA MEDIR LA RIGIDEZ, EL COEFICIENTE DE AMORTIGUACION Y LA INERCIA DE UN SISTEMA CONSTITUIDO POR UNA MASA (1) UNIDA A UN RESORTE (2) Y A UN AMORTIGUADOR (3),
EN PARTICULAR DEL MIEMBRO ACCIONADO CON LA MANO O CON EL PIE DEL MECANISMO DE CONTROL DE UN AVION O DE UN SIMULADOR DE VUELO. COMPRENDE LAS SIGUIENTES FASES: PRIMERA, CREAR TRES SEÑALES ELECTRICAS, A SABER: UNA SEÑAL DE FUERZA QUE TENGA UN VALOR DIRECTAMENTE PROPORCIONAL A LA FUERZA EJERCIDA SOBRE LA MASA, UNA SEÑAL DE ACELERACION QUE TENCA UN VALOR DIRECTAMENTE PROPORCIONAL A LA ACELERACION DE LA MASA Y UNA SEÑAL DE VELOCIDAD QUE TENGA UN VALOR DIRECTAMENTE PROPORCIANL A LA VELOCIDAD DE LA MASA; SEGUNGA, MOVER DICHA MASA DE TAL MANERA QUE ALCANCE UNA ACELERACION Y UNA VELOCIDAD CON VALORES DISTINTOS DE CERO, Y POR ULTIMO, AJUSTAR LA AMPLITUD DE LA SEÑAL DE ACELERACION Y DE LA SEÑAL DE VELOCIDAD DE TAL MODO QUE RESTANDO ESTAS DOS SEÑALES DE LA SEÑAL DE FUERZA, SE OBTENGA SUSTANCIALMENTE LA MISMA RELACION CON RESPECTO A LA DESVIACION QUE LA QUE SE OBIENE MIDIENDO LA RIGIDEZ.
Tipo: Resumen de patente/invención.
Solicitante: FOKKER B.V.
Nacionalidad solicitante: Países Bajos.
Dirección: SCHIPHOLDIJK 231,1117 AB SCHIPHOL.
Fecha de Solicitud: 22 de Enero de 1981.
Fecha de Publicación: .
Fecha de Concesión: 9 de Septiembre de 1981.
Clasificación Internacional de Patentes:
- G01L5/22 FISICA. › G01 METROLOGIA; ENSAYOS. › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 5/00 Aparatos o métodos para la medida de fuerzas, del trabajo, de la potencia mecánica o del par, especialmente adaptados a fines específicos. › para la medida de la fuerza aplicada a los órganos de control, p. ej. órganos de control de vehículos, gatillos.
Patentes similares o relacionadas:
Pedal, del 23 de Abril de 2019, de FERNSTEUERGERATE KURT OELSCH GMBH: Pedal para el accionamiento de una máquina de trabajo o de un vehículo industrial, que contiene a) un dispositivo de montaje, en el […]
Disposición de sensor para un árbol giratorio, del 26 de Octubre de 2018, de THYSSENKRUPP PRESTA AG: Disposición de sensor con un transmisor fijado de modo resistente al giro sobre un árbol que puede girar alrededor de un eje longitudinal, presentando el […]
Disposición para averiguar una fuerza que actúa sobre un timón, del 6 de Diciembre de 2017, de Becker Marine Systems GmbH: Sistema de posicionamiento dinámico para el posicionamiento automático de un vehículo acuático, en particular un barco, con un timón […]
Sensor táctil de puntos múltiples con matriz activa, del 19 de Abril de 2017, de Buyuksahin, Utku: Módulo de detección táctil de múltiples puntos de alta sensibilidad para robots y dispositivos que comprende un material elástico que está […]
Instrumento para cirugía robótica, del 18 de Mayo de 2016, de Surgica Robotica S.p.A: Un instrumento para cirugía robótica diseñado para montarse en el extremo distal de un brazo operativo de un aparato para cirugía robótica, comprendiendo el instrumento […]
 Aplicador médico servoasistido, del 6 de Abril de 2016, de WAVELIGHT GMBH: Procedimiento para el posicionamiento de un dispositivo médico con los pasos:
detección de una fuerza que actúa sobre un dispositivo de guía […]
Aplicador médico servoasistido, del 6 de Abril de 2016, de WAVELIGHT GMBH: Procedimiento para el posicionamiento de un dispositivo médico con los pasos:
detección de una fuerza que actúa sobre un dispositivo de guía […]
 Dispositivo actuador con sensor de fuerza, del 6 de Enero de 2016, de Stähle, Kurt: Dispositivo actuador para el accionamiento de al menos un pedal de un vehículo de motor, con al menos un elemento de accionamiento […]
Dispositivo actuador con sensor de fuerza, del 6 de Enero de 2016, de Stähle, Kurt: Dispositivo actuador para el accionamiento de al menos un pedal de un vehículo de motor, con al menos un elemento de accionamiento […]
 Dispositivo de dirección asistida eléctrica, del 30 de Diciembre de 2015, de KYB Corporation: Dispositivo de dirección asistida eléctrica que está configurado para asistir una fuerza de dirección aplicada a un volante por un conductor […]
Dispositivo de dirección asistida eléctrica, del 30 de Diciembre de 2015, de KYB Corporation: Dispositivo de dirección asistida eléctrica que está configurado para asistir una fuerza de dirección aplicada a un volante por un conductor […]