Vehículo estabilizado giroscópicamente.
Aparato que comprende:
un chasis (100); una rueda delantera (200) y una rueda trasera (210) acopladas al chasis;
al menos dos giroscopios (260) acoplados al chasis, incluyendo cada giroscopio un volante de inercia (270a, 270b),
caracterizado por que dicho aparato comprende además:
una pluralidad de sensores (560, 570, 580, 590) para detectar la orientación del chasis, la orientación de la rueda delantera con respecto al chasis, la orientación y la velocidad de rotación de los volantes de inercia y la velocidad del aparato; y
un sistema de control electrónico (550, 551, 553, 554) para ajustar al menos una de entre la orientación y la velocidad de rotación de al menos uno de los volantes de inercia en base, al menos en parte, a datos procedentes de la pluralidad de sensores y a una entrada para cambiar al menos una de entre la velocidad y la dirección del aparato.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2011/022409.
Solicitante: Lit Motors Corporation.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1086 Folsom Street San Francisco, CA 94103 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KIM,DANIEL KEE YOUNG, BRETNEY,KEVIN, TSANG,ANDEREW L.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D37/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 37/00 Estabilización de cajas de vehículos sin actuar sobre los dispositivos de suspensión. › utilizando giróscopos.
- B62D61/02 B62D […] › B62D 61/00 Vehículos a motor o remolques caracterizados por la disposición o el número de ruedas no previendo otro distinto, p. ej. cuatro ruedas dispuestas en rombo. › con otras dos en tándem dispuestas sobre el eje longitudinal del vehículo.
PDF original: ES-2506965_T3.pdf
Fragmento de la descripción:
Vehículo estabilizado giroscópicamente Reivindicación de prioridad
La presente solicitud reivindica la prioridad de la solicitud de patente provisional US 61/314540 presentada el 16 de marzo de 2010 y de la solicitud de patente no provisional US 12/875041 presentada el 2 de septiembre de 2010. 5
Campo de la invención
Las realizaciones de la invención se refieren a vehículos de transporte, y más particularmente a un vehículo estabilizado giroscópicamente Antecedentes
El aumento de los costos de energía y el impacto de los gases de efecto invernadero en el medio ambiente han 10 creado una necesidad creciente de vehículos de alta eficiencia con una baja huella de carbono. Los vehículos con las ruedas en línea, tales como motocicletas y escúteres, ofrecen una mayor eficiencia que los coches de cuatro ruedas convencionales; sin embargo, esta eficiencia se debe principalmente a las diferencias físicas entre los vehículos con las ruedas en línea y los coches de cuatro ruedas, por ejemplo, peso reducido, menor número de superficies de fricción y resistencia reducida. Además, muchos usuarios no están dispuestos o no pueden conducir 15 motocicletas ni escúteres debido a la exposición a la intemperie y al viento, a las preocupaciones de seguridad en caso de accidentes y a las habilidades necesarias para mantener la estabilidad del vehículo durante el uso del mismo.
Las soluciones para reducir la exposición de un usuario de un vehículo con las ruedas en línea a la intemperie y al viento típicamente se han limitado a dispositivos que protegen parcialmente al conductor de los elementos (por 20 ejemplo, un parabrisas) con el fin de permitir al usuario utilizar sus pies para ayudar a estabilizar el vehículo durante las velocidades lentas. Además, si bien ha habido algunas soluciones para intentar construir una cabina de usuario cerrada para un vehículo con las ruedas en línea, estas soluciones requieren más ruedas (aunque más pequeñas) para estabilizar el vehículo o no proporcionan estabilidad al vehículo durante todos los usos posibles y previsibles. Las soluciones de la técnica anterior que intentan estabilizar electrónicamente un vehículo con las ruedas en línea 25 también han fracasado a la hora de proporcionar soluciones eficientes de recursos y de energía para maximizar la eficiencia global del vehículo.
El documento FR 2678230 A1 describe un estabilizador fijado al chasis de una bicicleta con motor que comprende dos giroscopios con un solo grado de libertad.
El documento WO 2008/072043 A1 describe un aparato adecuado para escúteres y motocicletas con propulsión 30 híbrida capaz de proporcionar un equilibrio automático y estable mientras el vehículo está parado, sin que se sea necesario que el conductor apoye los pies en el suelo. El sistema está provisto de una unidad de giroscopio estático y de un codificador de posición angular.
Breve descripción de los dibujos
La siguiente descripción incluye la descripción de figuras que tienen ilustraciones dadas a modo de ejemplo de 35 aplicaciones de realizaciones de la invención. Los dibujos deben entenderse a modo de ejemplo, y no a modo de limitación. Tal como se usa en el presente documento, las referencias a una o más "realizaciones" han de entenderse como que describen un rasgo, estructura o característica particular incluido en al menos una aplicación de la invención. Así, frases como "en una realización" o "en una realización alternativa" en este documento describen varias realizaciones y aplicaciones de la invención, y no necesariamente todas se refieren a la misma 40 realización. Sin embargo, tampoco son necesariamente excluyentes entre sí.
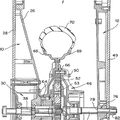
La figura 1 muestra una vista lateral en corte parcial de un vehículo que incluye realizaciones de la invención.
La figura 2 muestra una vista despiezada de un conjunto de volante de inercia.
Las figuras 3a-h muestran vistas laterales en corte parcial del vehículo en diferentes estados, indicando los flujos de energía de acuerdo con una realización de la invención. 45
La figura 4 muestra un organigrama de energía de acuerdo con una realización de la invención.
La figura 5 muestra un organigrama de un sistema de control de acuerdo con una realización de la invención.
La figura 6 muestra una realización de un sistema de control.
Las siguientes descripciones de determinados detalles y aplicaciones incluyen una descripción de las figuras, que pueden representar todas o algunas de las realizaciones descritas a continuación, así como posibles descripciones de otras realizaciones o aplicaciones de los conceptos de la invención presentados en el presente documento. Una visión general de las realizaciones de la invención se proporciona a continuación, seguida de una descripción más detallada con referencia a los dibujos. 5
Descripción detallada
El concepto básico del uso de giroscopios para mantener un vehículo de dos ruedas en posición vertical mediante el uso de precesión del volante para generar par inverso se conoce (aunque en esta memoria se hace referencia a vehículos de dos ruedas giroestabilizados, los principios de la giroestabilización también pueden ser utilizados en cualquier vehículo que tenga una banda de rodamiento estrecha ya que la giroestabilización se utiliza para 10 estabilizar el vehículo o para aumentar su sistema de suspensión a fin de proporcionar estabilidad) ; sin embargo, estos sistemas no han llegado a ser habituales por diversas razones entre las que se incluyen la falta de un diseño de un sistema de control adecuado para que un vehículo funcione con seguridad a velocidades de autopista y en todas las condiciones.
Los intentos anteriores de incorporar la estabilización por volante de inercia añadieron gran complejidad y, por tanto, 15 peso a los vehículos debido a los requisitos adicionales de trenes propulsores mecánicos, potencia y combustible (o batería) . Además, los mismos volantes de inercia consumían una cantidad nada despreciable de energía y por tanto invalidaban las ventajas de eficiencia inherentes al propio vehículo de dos ruedas. Sin embargo, los avances en los sistemas de accionamiento eléctricos que utilizan motogeneradores no permiten emisiones de energía a un vehículo, y proporcionan la posibilidad de utilizar los principios de frenado regenerativo para recuperar mayores cantidades de 20 energía en la fase de desaceleración del vehículo. Esto, combinado con los avances en la densidad de almacenamiento de energía, permite una gran autonomía, incluso con la energía adicional utilizada para la giroestabilización.
Las ecuaciones básicas que rigen estos efectos son conocidas y descritas mediante ecuaciones. El momento de inercia (I) para un disco sólido viene dado por I = Â * m * r2, siendo m la masa del disco y siendo r el radio. Para un 25 peso de vehículo y un centro de gravedad (CG) dados, un volante de inercia estabilizador giroscópico puede ser dimensionado de manera que la estabilidad vertical del vehículo pueda ser controlada de manera indefinida mientras esté parado. El radio, la masa y la geometría del volante de inercia se pueden seleccionar para mantener un tamaño compacto que pueda encajar en el chasis del vehículo y aun así poder proporcionar un momento de inercia efectivo I. 30
Hacer que un volante de inercia giratorio realice un movimiento de precesión alrededor de un eje que es perpendicular al eje de rotación del volante va a crear un par inverso perpendicular tanto al eje de rotación como al eje de precesión. El par inverso útil Ï de un conjunto de volante de inercia montado sobre suspensión cardánica viene dado por la ecuación: Ï = Idisco *Ïdisco *Ïeje. La velocidad de rotación del volante de inercia juega un papel importante en la cantidad de par útil Ï disponible para estabilizar el vehículo. Como una de las únicas variables 35 controlables en la ecuación que rige una masa y una geometría de volante de inercia seleccionadas, la velocidad de rotación del volante de inercia puede ser controlada para compensar la variación de la carga estática y la distribución de la carga del vehículo y por consiguiente la capacidad de corrección de un estabilizador giroscópico.
Otras variables utilizadas en el control del vehículo incluyen:
ÎVehículo es la inclinación del vehículo de lado a lado medida en radianes 40
Vvehículo es la velocidad del vehículo mientras se mueve por la carretera medida en metros por segundo
Ïdisco es la velocidad de rotación del volante de inercia medida en radianes por segundo
Ïeje es la inclinación del volante de inercia con respecto a la vertical, medida en radianes
Ïeje es... [Seguir leyendo]
Reivindicaciones:
1. Aparato que comprende:
un chasis (100) ; una rueda delantera (200) y una rueda trasera (210) acopladas al chasis; al menos dos giroscopios (260) acoplados al chasis, incluyendo cada giroscopio un volante de inercia (270a, 270b) ,
caracterizado por que dicho aparato comprende además: 5
una pluralidad de sensores (560, 570, 580, 590) para detectar la orientación del chasis, la orientación de la rueda delantera con respecto al chasis, la orientación y la velocidad de rotación de los volantes de inercia y la velocidad del aparato; y
un sistema de control electrónico (550, 551, 553, 554) para ajustar al menos una de entre la orientación y la velocidad de rotación de al menos uno de los volantes de inercia en base, al menos en parte, a datos procedentes 10 de la pluralidad de sensores y a una entrada para cambiar al menos una de entre la velocidad y la dirección del aparato.
2. Aparato de acuerdo con la reivindicación 1, en el que la entrada para cambiar la dirección del aparato comprende una entrada para cambiar la orientación de la rueda delantera con respecto al chasis, y el sistema de control electrónico para ajustar la al menos una de entre la orientación y velocidad de rotación de al menos uno de los 15 volantes de inercia para mantener la estabilidad durante un viraje.
3. Aparato de acuerdo con la reivindicación 1, estando el sistema de control electrónico previsto para reducir la velocidad del volante o volantes de inercia cuando la entrada comprende una entrada para aumentar la velocidad del aparato.
4. Aparato de acuerdo con la reivindicación 1, que comprende además un sistema de frenado (190) para reducir la 20 velocidad de al menos una de las ruedas delantera y trasera, en el que la entrada para cambiar la velocidad del aparato comprende una entrada para acoplar el sistema de frenado, estando el sistema de control electrónico previsto para aumentar la velocidad del volante de inercia a fin de aumentar el efecto de la estabilidad.
5. Aparato de acuerdo con la reivindicación 1, estando los al menos dos giroscopios alineados longitudinalmente con respecto a la rueda delantera y a la rueda trasera. 25
6. Aparato de acuerdo con la reivindicación 5, estando los al menos dos volantes de inercia previstos para girar y realizar un movimiento de precesión en direcciones opuestas uno con respecto al otro.
7. Aparato de acuerdo con la reivindicación 1, estando los al menos dos giroscopios alineados al menos uno en el sentido de la anchura con respecto al chasis del vehículo, y en el sentido de la altura con respecto al chasis del vehículo. 30
8. Aparato de acuerdo con la reivindicación 1, teniendo los al menos dos volantes de inercia un tamaño idéntico.
9. Aparato de acuerdo con la reivindicación 1, comprendiendo cada uno de los al menos dos volantes de inercia al menos uno de entre fibra de carbono, Kevlar, acero, latón, bronce, plomo y uranio empobrecido.
10. Aparato de acuerdo con la reivindicación 1, estando los al menos dos giroscopios acoplados al chasis mediante un primer y un segundo conjunto de soportes cardánicos, respectivamente. 35
11. Sistema que comprende:
al menos un procesador (550, 551, 553, 554) ; una memoria (550, 551, 553, 554) ; y un módulo de control (550, 551, 553, 554) almacenado en la memoria y ejecutado a través del procesador para recibir datos de una pluralidad de sensores (506, 570, 580, 590) que indican la orientación de un chasis de un vehículo (100) , la orientación de una rueda delantera (200) de vehículo con respecto al chasis y la velocidad del chasis, caracterizado por que el módulo 40 de control recibe datos de una pluralidad de sensores (506, 570, 580, 590) que indican la orientación y la velocidad de rotación de un volante de inercia (270a, 270b) incluido en un giroscopio (260) acoplado al chasis,
recibe una entrada para cambiar al menos una de entre la velocidad y la dirección del vehículo,
determina un estado de vehículo (556) en base, al menos en parte, a los datos recibidos, y 45
ajusta al menos una de entre la orientación y la velocidad de rotación del volante de inercia en base, al menos en parte, al estado del vehículo,
ajusta al menos una de entre la orientación y la velocidad de rotación del volante de inercia en base además, al menos en parte, a la entrada para cambiar al menos una de entre la velocidad y la dirección del vehículo.
12. Sistema de acuerdo con la reivindicación 11, estando además previsto el módulo de control para determinar un 5 estado de vehículo previsto en base, al menos en parte, a la entrada recibida, y
ajustar al menos una de entre la orientación y la velocidad de rotación del volante de inercia en base, al menos en parte, al estado de vehículo previsto.
13. Sistema de acuerdo con la reivindicación 12, en el que la entrada recibida comprende un comando para hacer girar la rueda delantera, estando el estado de vehículo previsto para comprender un viraje, estando el módulo de 10 control previsto para ajustar la orientación y la velocidad de rotación del volante de inercia para mantener la estabilidad durante el viraje.
14. Sistema de acuerdo con la reivindicación 11, que comprende además: un módulo de control de motogenerador de volante de inercia (553) para controlar el volante de inercia del giroscopio y para funcionar en un modo motor y un modo generador, en el que el modo motor comprende la transferencia de corriente eléctrica al giroscopio para 15 cambiar al menos una de entre la orientación y la velocidad de rotación del volante de inercia, y el modo generador comprende la transferencia de corriente eléctrica generada por el volante de inercia a partir del giroscopio.
15. Sistema de acuerdo con la reivindicación 11, que comprende además
un módulo de control de motogenerador de rueda de accionamiento (440) para controlar al menos una de entre la rueda delantera y la trasera del vehículo y para funcionar en un modo motor y en un modo generador, en el que el 20 modo motor comprende recibir corriente eléctrica de la velocidad de rotación de la rueda correspondiente, y el modo generador comprende la transferencia de corriente eléctrica generada por la rueda correspondiente.
16. Sistema que comprende:
un motogenerador de rueda de accionamiento (220, 230) para transferir energía hacia y desde una rueda de accionamiento de un vehículo; 25
un motogenerador de volante de inercia (280a, 280b) para transferir energía hacia y desde un volante de inercia incluido en un estabilizador de giroscopio de vehículo;
caracterizado por que el sistema comprende además:
un banco de condensadores (430) que incluye una batería (420) ; y un controlador de potencia (440) para
transferir energía desde el volante de inercia del motogenerador al banco de condensadores en respuesta a la 30 detección de una entrada para aumentar la velocidad del vehículo, y transferir energía desde el motogenerador de rueda de accionamiento al banco de condensadores en respuesta a la detección de una entrada para disminuir la velocidad del vehículo.
17. Sistema de acuerdo con la reivindicación 16, estando el controlador de potencia previsto además para transferir energía desde el banco de condensadores al motogenerador de rueda de accionamiento en respuesta a la 35 detección de la entrada para aumentar la velocidad del vehículo, y
transferir energía desde el banco de condensadores al motogenerador de volante de inercia en respuesta a la detección de la entrada para disminuir la velocidad del vehículo.
18. Sistema de acuerdo con la reivindicación 17, estando previsto el controlador de potencia para
transferir la energía no requerida por el motor de rueda de accionamiento a al menos uno de entre el banco de 40 condensadores y la batería en respuesta a la detección de una entrada para aumentar la velocidad del vehículo, y
transferir la energía no requerida por el volante de inercia a al menos uno de entre la banco de condensadores y la batería en respuesta a la detección de una entrada para disminuir la velocidad del vehículo
19. Sistema de acuerdo con la reivindicación 16, comprendiendo la entrada para disminuir la velocidad del vehículo una entrada para acoplarse a un sistema de frenado (190) del vehículo, estando previsto el sistema de frenado para 45 generar energía transferible desde el motogenerador de rueda de accionamiento.
20. Sistema de acuerdo con la reivindicación 16, estando previsto además el controlador de potencia para transferir energía del banco de condensadores al motogenerador de volante de inercia en base, al menos en parte, a si la velocidad del vehículo afectará a la estabilidad del vehículo.
21. Sistema de acuerdo con la reivindicación 16, estando previsto además el controlador de potencia para determinar si la entrada para disminuir la velocidad del vehículo va a afectar a la estabilidad del vehículo; y 5
transferir la energía del banco de condensadores al motogenerador de volante de inercia en respuesta a la determinación de si la entrada para disminuir la velocidad del vehículo va a afectar a la estabilidad del vehículo.
Patentes similares o relacionadas:
PLATAFORMA OMNIDIRECCIONAL, del 11 de Febrero de 2019, de UNIVERSITAT POLITECNICA DE CATALUNYA: Plataforma omnidireccional. Plataforma que comprende un primer módulo con una primera rueda motriz y una segunda rueda motriz enfrentadas […]
Vehículo, del 1 de Marzo de 2017, de BOMBARDIER RECREATIONAL PRODUCTS INC: Un vehículo que comprende: un cuadro que tiene una parte frontal y una parte trasera; un par de ruedas frontales que comprenden una rueda frontal izquierda […]
SISTEMA DE TRANSPORTE SIN CONDUCTOR, del 1 de Noviembre de 2003, de INDUMAT GMBH & CO. KG.: Sistema de transporte sin conductor para el transporte de cargas por medio de, como mínimo, un vehículo de transporte sin conductor FTF desde un suelo de transporte […]
VEHICULO DE DOS RUEDAS., del 1 de Abril de 1998, de ALCOVER SOLE, JAIME: COMPRENDE UNA CARROCERIA QUE ENVUELVE TOTALMENTE A LOS USUARIOS E INCLUYE POR LO MENOS UNA PUERTA DE ACCESO, Y ESTA PROVISTO ADEMAS DE MEDIOS RETIRABLES […]
MOTOCICLO PARA LA LAMPARA DE SUELOS., del 1 de Febrero de 1983, de DECAUX,JEAN CL.: MOTOCICLO PARA LA LIMPIEZA DE SUELOS. CONSTA DE UN DISPOSITIVO DE LIMPIEZA PROVISTO DE ORGANOS GIRATORIOS DE LIMPIEZA DISPUESTOS EN UN CARTER QUE PUEDE DESPLAZARSE […]
CARRO ACUMULADOR DE PACAS., del 1 de Diciembre de 1976, de PINEDO PASCUAL,MARIA PAZ: Carro acumulador de pacas constituido por una plataforma sustentada sobre sendas ruedas y un apoyo delantero que descansa sobre la barra de tracción del carro, […]
 CONJUNTO DE RUEDA MOTRIZ DE VEHÍCULO, del 8 de Marzo de 2011, de Vectrix International Limited: Dispositivo de accionamiento de vehículo que comprende: un motor configurado para accionar el vehículo y que incluye un árbol de motor accionado de manera giratoria, […]
CONJUNTO DE RUEDA MOTRIZ DE VEHÍCULO, del 8 de Marzo de 2011, de Vectrix International Limited: Dispositivo de accionamiento de vehículo que comprende: un motor configurado para accionar el vehículo y que incluye un árbol de motor accionado de manera giratoria, […]
 VEHICULO DE DOS RUEDAS CON TRACCION EN LAS DOS RUEDAS, del 17 de Diciembre de 2010, de CHRISTINI TECHNOLOGIES, INC: Conjunto de bastidor de motocicleta para una motocicleta con tracción en las dos ruedas provista únicamente de dos ruedas, que comprende: un bastidor , […]
VEHICULO DE DOS RUEDAS CON TRACCION EN LAS DOS RUEDAS, del 17 de Diciembre de 2010, de CHRISTINI TECHNOLOGIES, INC: Conjunto de bastidor de motocicleta para una motocicleta con tracción en las dos ruedas provista únicamente de dos ruedas, que comprende: un bastidor , […]