Protección electrónica contra la expulsión por deslizamiento y procedimiento para impedir la expulsión por empuje o por extracción involuntaria de plataformas de una estantería de almacén.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09150146.
Solicitante: SSI SCHAFER NOELL GMBH LAGER-UND SYSTEMTECHNIK.
Nacionalidad solicitante: Alemania.
Dirección: I PARK KLINGHOLZ 18/19 97232 GIEBELSTADT ALEMANIA.
Inventor/es: SCHAFER, GERHARD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
- B66F17/00 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › Dispositivos de seguridad, p. ej. para limitar o indicar la fuerza de elevación.
- B66F9/07 B66F […] › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › Dispositivos para almacenar desde el suelo hasta el techo, p. ej. apiladoras.
PDF original: ES-2407961_T3.pdf
Fragmento de la descripción:
Protección electrónica contra la expulsión por deslizamiento y procedimiento para impedir la expulsión por empuje o por extracción involuntaria de plataformas de una estantería de almacén La presente invención se refiere a una protección electrónica contra la expulsión por deslizamiento para un transelevador, así como a un procedimiento para impedir la expulsión por empuje o por extracción involuntaria de un medio auxiliar de carga tal como, por ejemplo, una plataforma en una o de una ubicación de una estantería de almacén, en la que el transelevador almacena automáticamente el medio auxiliar de carga en la ubicación o lo retira automáticamente de la misma.
Por el documento DE 10 2006 039 382 A1 se da a conocer un transelevador.
Por los documentos US 2007/0215412 A1 y DE 201 19 110 U1 se da a conocer un procedimiento de medición de distancia.
Según el estado de la técnica, se conocen transelevadores (RGB) como vehículos guiados por carriles para la manipulación de mercancías en un almacén de estanterías altas. Un transelevador tiene habitualmente tres grados de libertad de movimiento, concretamente a lo largo de un eje X (dirección de pasillo; dirección de desplazamiento de la unidad de rodadura) , un eje Y (dirección vertical; dirección de desplazamiento de la unidad de elevación) y una dirección Z (dirección transversal con respecto al pasillo; dirección de desplazamiento del medio portador de carga) .
Un transelevador suele ser, habitualmente, un vehículo unido al suelo que presenta un medio de transporte desplazable libremente sobre o a lo largo de un carril, y que sirve esencialmente para el transporte horizontal y vertical de mercancías, artículos, cargas y/o, si existen los dispositivos adecuados, de personas dentro de una empresa. A menudo, el transelevador se desplaza, guiado por carriles, en un pasillo o una calle entre dos estanterías. Sin embargo, también se conocen transelevadores unidos a la estantería. En la patente DE 10 2006 037 719 se encuentran informaciones más detalladas sobre la estructura de un transelevador.
Un transelevador comprende normalmente un tren de rodadura, una columna, un mecanismo de elevación, un carro de elevación así como un medio portador de carga. Mediante el tren de rodadura el transelevador puede ser desplazado a lo largo de la calle. Un carro de elevación que presenta el medio portador de carga es desplazado a lo largo de la columna esencialmente en dirección vertical mediante el mecanismo de elevación. El medio portador de carga sirve para la recogida y la entrega de unidades de almacenaje que, habitualmente, están depositadas sobre medios auxiliares de carga.
Con el término medio portador de carga (MPC) se entiende una parte del transelevador que recoge y entrega unidades de almacenaje. Un MPC típico para plataformas es, por ejemplo, una horquilla de elevación. Una unidad de almacenaje representa una unidad de manipulación (plataforma, recipiente, bandeja, etc. que está cargado) que es almacenada, por ejemplo, en un almacén de estanterías altas o en un almacén automático de piezas pequeñas (AKL) . Un medio auxiliar de carga se utiliza para formar unidades de almacenaje. Se distinguen, dependiendo de su función, medios auxiliares de carga con función portante (por ejemplo plataformas) , con función portante y circundante (por ejemplo, plataformas con jaula, recipientes, bandejas, etc.) y con función portante, circundante y de cierre (por ejemplo, contenedores) . Las unidades de almacenaje de un solo producto contienen solamente artículos de un tipo o de una variedad.
Cuando se utilizan plataformas como medios auxiliares de carga, las unidades de almacenaje se cargan generalmente a través de un par de horquillas telescópicas, en el caso de recipientes, por ejemplo, mediante un transportador de banda, dispositivos de tracción tales como ganchos, lazos o brazos articulados, o bien mediante una mesa elevadora o un shuttle.
Habitualmente, en un almacén de estanterías que funciona de forma automatizada mediante un transelevador la coordinación de los movimientos se realiza mediante un ordenador de gestión de almacén (OGA) . El OGA tiene asignados múltiples unidades de control estructuradas jerárquicamente. Un transelevador recibe sus órdenes para almacenar y retirar medios auxiliares de carga (MACs) , por ejemplo, de un controlador lógico programable (CLP) . Un CLP es un conjunto que se utiliza generalmente para controlar y/o regular máquinas. Generalmente, un conjunto de este tipo está realizado de forma electrónica y es similar a los conjuntos en un ordenador. Habitualmente, con este conjunto están relacionados donadores (sensores) y elementos de ajuste (actores) . Un sistema operativo (Firmware) correspondiente asegura que un programa de usuario siempre tenga a disposición el estado actual de un donador. Por medio de estas informaciones, el programa de usuario puede conectar y desconectar los elementos de ajuste de tal manera que el transelevador funciona del modo deseado, por ejemplo, almacenando o retirando una plataforma.
Dado que resulta deseable que la entrega y la recogida de plataformas se realice de forma automatizada, es necesario prever las denominadas protecciones contra la expulsión por deslizamiento que evitan, por ejemplo, que una plataforma sea empujada al entregar la misma en la estantería. Para evitar que sea empujada demasiado lejos se utilizan habitualmente topes mecánicos, tal como se dan a conocer a título de ejemplo en el modelo de utilidad alemán DE 90 13 721 U1.
Otra posibilidad para, como mínimo, detectar que se ha empujado demasiado lejos consiste en vigilar un par de accionamiento necesario para hacer salir o entrar la horquilla, cuando se utiliza, por ejemplo, una horquilla telescópica. Si una plataforma a entregar choca contra una plataforma que ya se encuentra en la estantería porque la plataforma a entregar ha sido desplazada demasiado lejos al interior de la estantería por el MPC, aumentará el par de giro necesario ya que ambas plataformas son desplazadas en la estantería. En este principio de la vigilancia del par de accionamiento se basan las protecciones electrónicas contra la expulsión por deslizamiento que presentan los denominados acoplamientos de enclavamiento o acoplamientos deslizantes. Este tipo de protección electrónica contra la expulsión por deslizamiento tiene, sin embargo, el inconveniente de que es par limitado, es decir que, entre otras cosas depende de que exista una fricción entre los componentes implicados (estantería, plataforma, horquilla, etc.) .
Por esto existe la necesidad de una protección contra la expulsión por deslizamiento sin tope mecánico que no dependa del tamaño, del material utilizado, del dimensionado y del peso del MAC o de la unidad de almacenaje y reaccione con máxima rapidez cuando se produce un error. Asimismo, sería deseable que se pudiera impedir no solamente que sea empujado demasiado lejos, sino también que sea extraído involuntariamente dado que, en principio, es posible que al retirar el MPC, el MAC sea arrastrado por éste, por ejemplo, porque el MAC no ha sido depositado correctamente.
Además, es un objetivo proporcionar un procedimiento para impedir la expulsión por empuje o que se extraiga involuntariamente un MAC (plataforma) .
Este objetivo se soluciona mediante una protección electrónica contra la expulsión por deslizamiento , en la que la protección electrónica contra la expulsión por deslizamiento para un transelevador que entrega de forma automatizada un MAC, en especial una plataforma o un recipiente, en una ubicación en una estantería de almacén o lo recoge de la misma, presentando el transelevador un carro de elevación desplazable en una dirección esencialmente vertical con un medio portador de carga desplazable en una dirección esencialmente horizontal, está dotada de un dispositivo de control del medio auxiliar de carga, estando dicho dispositivo de control conectado a un dispositivo de detección de posición, a efectos de detectar una posición de un medio auxiliar de carga a almacenar o a retirar del almacén en relación con la ubicación, estando el dispositivo de detección de posición configurado de manera que puede detectar una desviación de una posición real con respecto a una posición deseada del medio auxiliar de carga, preferentemente con una medición de distancia, para emitir una señal de desviación al dispositivo de control del medio auxiliar de carga y, estando el dispositivo de control del medio auxiliar de carga configurado de manera que al recibir una señal de desviación detiene un movimiento horizontal del medio portador.
Además, este problema se soluciona mediante un procedimiento para impedir que un medio auxiliar de... [Seguir leyendo]
Reivindicaciones:
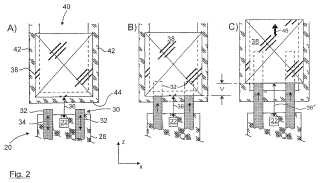
1. Protección electrónica contra la expulsión por deslizamiento, para un transelevador (20) que entrega un medio auxiliar de carga (38) , en especial, una plataforma (38) o un recipiente de forma automatizada en una ubicación (40) de una estantería de almacén (42, 44) o lo recoge de la misma, en la que el transelevador (20) presenta un carro de elevación (28) desplazable en una dirección esencialmente vertical, con un medio portador de carga (30) desplazable en una dirección esencialmente horizontal, con un dispositivo de control (24) para el medio portador de carga, estando el dispositivo de control (24) para el medio portador de carga conectado con un dispositivo de detección de posición (22) para detectar una posición de un medio auxiliar de carga (38) a almacenar o a retirar del almacén en relación con la ubicación (40) , estando el dispositivo de detección de posición (22) configurado para detectar una desviación de una posición real con respecto a una posición deseada del medio auxiliar de carga (38) , preferentemente, mediante una medición de distancia, a efectos de emitir una señal de desviación dirigida al dispositivo de control (24) del medio portador de carga, y estando el dispositivo de control del medio portador de carga configurado de manera que detiene el desplazamiento horizontal del medio portador de carga (30) cuando recibe la señal de desviación.
2. Protección electrónica contra la expulsión por deslizamiento, según la reivindicación 1, en la que el medio portador de carga (30) puede ser desplazado horizontalmente para entrar en la ubicación (40) y salir de dicha ubicación (40) a efectos de almacenar el medio auxiliar de carga (38) o retirar el mismo del almacén.
3. Protección electrónica contra la expulsión por deslizamiento, según la reivindicación 1 ó 2, en la que el dispositivo de detección de posición (22) puede ser montado fijamente en el carro de elevación (28) y de forma lateralmente distanciada con respecto al medio portador de carga (30) , de tal manera que el dispositivo de detección de posición
(22) no se desplaza con respecto a la estantería de almacén (42, 44) durante el desplazamiento horizontal del medio portador de carga (30) y que el dispositivo de detección de posición (22) se desplaza de forma sincronizada con el carro de elevación (28) en relación con la estantería de almacén (40, 42) durante el desplazamiento vertical del carro de elevación (28) .
4. Protección electrónica contra la expulsión por deslizamiento, según una de las reivindicaciones 1 a 3, en la que al detener el movimiento del medio portador de carga (30) se pone a cero una energía motriz de un accionamiento para el medio portador de carga.
5. Protección electrónica contra la expulsión por deslizamiento, según la reivindicación 4, en la que el dispositivo de control (24) del medio portador de carga es un convertidor con una lógica integrada en el que se almacena una rampa cero para detener el movimiento del medio portador de carga (30) .
6. Protección electrónica contra la expulsión por deslizamiento, según una de las reivindicaciones anteriores, en la que el medio portador de carga (30) es una horquilla telescópica (32) para la manipulación de plataformas o una mesa elevadora desplazable en una dirección horizontal para la manipulación de recipientes.
7. Protección electrónica contra la expulsión por deslizamiento, según una de las reivindicaciones anteriores, en la que el dispositivo de detección de posición (22) es un sensor de distancia, preferentemente un sensor láser o un explorador de punto luminoso.
8. Protección electrónica contra la expulsión por deslizamiento, según una de las reivindicaciones anteriores, en la que se prevé otro dispositivo de control (16) para la coordinación global de un proceso de almacenamiento o de un proceso de retirada del almacén que es, preferentemente, un controlador lógico programable superior.
9. Protección electrónica contra la expulsión por deslizamiento, según la reivindicación 8, en la que ambos dispositivos de control están conectados a través de un sistema de bus (18) .
10. Protección electrónica contra la expulsión por deslizamiento, según una de las reivindicaciones 8 ó 9, en la que un dispositivo de control (24) para el medio portador de carga está conectado directamente con el dispositivo de detección de posición (22) para poder transmitir la señal de desviación sin interposición del dispositivo de control adicional (16) .
11. Transelevador (20) con un medio portador de carga (30) , un carro de elevación (28) desplazable en una dirección esencialmente vertical y una protección electrónica contra la expulsión por deslizamiento, según una de las reivindicaciones 1 a 10.
12. Sistema de estanterías (10) con un ordenador de gestión de almacén (12) con, como mínimo, un transelevador (20) , según la reivindicación 11.
13. Procedimiento para evitar la expulsión por empuje o por extracción de forma no intencionada un medio auxiliar de carga (38) que ha de ser entregado en una ubicación (40) en una estantería de almacén (42, 44) mediante un transelevador (20) o que ha de ser recogida allí, según el cual el transelevador (20) almacena el medio auxiliar de
carga (38) de forma automatizada en la ubicación (40) o lo retira de forma automatizada de dicha ubicación (40) , presentando el transelevador (20) un carro de elevación (28) desplazable en una dirección esencialmente vertical con un medio portador de carga (30) desplazable en una dirección esencialmente horizontal, y que consta de las siguientes etapas:
la determinación de una distancia relativa (36) entre el medio auxiliar de carga (38) depositado en la ubicación
(40) y el carro de elevación (28) para definir una posición deseada del medio auxiliar de carga (38) ; la activación de una vigilancia de posición cuando el carro de elevación (28) está posicionado delante de la ubicación en una posición de almacenamiento o en una posición de retirada del almacén para definir una posición real del medio auxiliar de carga (38) ; el desplazamiento del medio portador de carga (30) de tal manera que, para retirar el medio auxiliar de carga (38) , el medio portador de carga (30) entra en la ubicación (40) para poder colocar el medio auxiliar de carga
(38) seguidamente sobre el medio portador de carga (30) salido, o de tal manera que, para almacenar el medio auxiliar de carga (38) , una vez depositado dicho medio auxiliar de carga (38) en la ubicación (40) , el medio portador de carga (30) sale de la ubicación (40) ; la comprobación si durante el desplazamiento del medio portador de carga (30) se produce una desviación significativa de la posición real con respecto a la posición deseada; y si se produce una desviación significativa, la generación de una señal de desviación (50) para provocar la detención inmediata del movimiento del medio portador de carga (30) ; o bien si no se produce una desviación significativa, la continuación del movimiento del medio portador de carga (30) .
14. Procedimiento, según la reivindicación 13, en el que la señal de desviación (50) es transmitida directamente a un dispositivo de control (24) del medio portador de carga.
15. Procedimiento, según una de las reivindicaciones 13 ó 14, en el que se deposita una rampa cero en el dispositivo de control (24) del medio auxiliar de carga.
16. Procedimiento, según una de las reivindicaciones 13 a 15, en el que la vigilancia de posición (22) sólo se activa durante un desplazamiento horizontal del medio portador de carga (30) .
17. Procedimiento, según una de las reivindicaciones 13 a 16, en el que la activación de la vigilancia de posición es iniciada por un dispositivo de control superior (16) del transelevador que está conectado preferentemente con un ordenador de gestión de almacén (12) .
Patentes similares o relacionadas:
Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, del 27 de Julio de 2020, de RUIZ DE LARA REDONDO, José Antonio: Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, capaces de trasladarse […]
Sistema de almacenamiento en estantería con realimentación de energía, del 1 de Julio de 2020, de KNAPP LOGISTIK AUTOMATION GMBH: Sistema de almacenamiento en estantería con al menos dos unidades de estantería (1a-1d), presentando cada unidad de estantería un dispositivo […]
Sistema de preparación para la expedición con un robot de transporte para pasar por debajo de estanterías individuales y carros de transporte, del 13 de Mayo de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos almacenados en un almacén con estanterías en bolsas de transporte con […]
Dispositivo para transferencia de artículos e instalación para transporte de artículos, del 6 de Mayo de 2020, de DAIFUKU CO., LTD.: Dispositivo para transferencia de artículos (2B, 2C) configurado para desplazar un artículo (W) a lo largo de una dirección de transferencia (Y) […]
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Procedimiento y dispositivo para el almacenamiento y recuperación o reubicación de contenedores en almacenes de gran altura, del 4 de Marzo de 2020, de AMOVA GmbH: Procedimiento para almacenar y recuperar o reubicar contenedores en almacenes de gran altura de una instalación de transbordo, […]
Dispositivo lanzadera de almacén, y sistemas y métodos que lo incorporan, del 4 de Marzo de 2020, de Majied, Fadi Mohammad Majed Hussain Abdel: Sistema para desplazar palés que comprende: una rejilla rectangular que comprende carriles laterales orientados a lo largo de un eje x y carriles ortogonales […]
Sistema de preparación para la expedición de artículos para la preparación de pedidos y de lotes, del 19 de Febrero de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos desde contenedores de almacenamiento en contenedores […]