PROCEDIMIENTO DE INTERCAMBIO DE DATOS ENTRE SISTEMAS DE MANDO DE MAQUINAS, Y EN PARTICULAR DE ROBOTS.
Procedimiento de intercambio de datos entre sistemas de mando de máquinas,
y en particular de robots, donde un primer sistema de mando genera una instrucción a transmitir con datos a enviar a un segundo sistema de mando y con una identificación que representa a este segundo sistema de mando, se dota a la instrucción a transmitir de una identificación del primer sistema de mando y el primer sistema de mando envía la instrucción a transmitir al segundo sistema de mando, y donde el segundo sistema de mando evalúa los datos de la instrucción y el segundo sistema de mando le da una comunicación de retorno al primer sistema de mando, estando dicho procedimiento caracterizado por el hecho de que el segundo sistema de mando compila los datos recibidos en un código interno
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03017030.
Solicitante: KUKA ROBOTER GMBH.
Nacionalidad solicitante: Alemania.
Dirección: BLUCHERSTRASSE 144,86165 AUGSBURG.
Inventor/es: GRAF, STEFAN, CHAFFEE,MICHAEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Julio de 2003.
Fecha Concesión Europea: 16 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- B25J9/16C
- B25J9/16P4
- G05B19/418C
- G05B19/418N
Clasificación PCT:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G05B19/418 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
Clasificación antigua:
- B25J9/16 B25J 9/00 […] › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G05B19/042 G05B 19/00 […] › que utilizan procesadores digitales (G05B 19/05 tiene prioridad).
- G05B19/418 G05B 19/00 […] › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento de intercambio de datos entre sistemas de mando de máquinas, y en particular de robots.
La invención se refiere a un procedimiento de intercambio de datos entre sistemas de mando de máquinas, y en particular de robots.
La transmisión de datos entre sistemas de mando de máquinas se efectúa en la actualidad tan sólo a través de conexiones directas, ya sea en forma de entradas y salidas directamente cableadas, o bien a través de sistemas de bus de campo para la transferencia de datos, mientras que las órdenes no son transmisibles de esta manera. Las órdenes deben darse a través de elementos de operador o de un ordenador central. Los datos correspondientes son transmitidos directamente como tales entre ambos sistemas de mando.
La técnica existente hasta la fecha es complicada, puesto que deben preverse las entradas/salidas físicas o el sistema de bus de campo. Debe establecerse una coincidencia en ambos sistemas de mando, para que las respectivas entradas/salidas tengan los mismos significados. Puesto que los sistemas de mando de ordinario no se comunican directamente a través de bus de campo, sino a través de un PLC (controlador lógico programable) de la instalación intercalado, en este PLC debe respetarse una correspondencia 1:1 de las entradas/salidas. Si debe ampliarse la comunicación entre los sistemas de mando, esto implica una modificación de los programas de mando de la configuración de entrada y salidas (adicionales palabras de bus de campo, líneas adicionales para las entradas/salidas físicas, adicional esfuerzo de programación en el lado del PLC).
El impreso "H. Asama et al.", Proceedings of IEEE/RSJ, International Workshop on Intelligent Robots and Systems I ROS (1991), páginas 1215-1220, describe un procedimiento de intercambio de datos entre sistemas de mando de máquinas ("ordenadores portátiles" y servoelectrónica en "robots móviles") donde un primer sistema de mando genera una instrucción a transmitir con datos a enviar a un segundo sistema de mando y con una identificación que representa a este segundo sistema de mando, donde se dota a la instrucción a transmitir de una identificación del primer sistema de mando y el primer sistema de mando envía la instrucción a transmitir al segundo sistema de mando, donde el segundo sistema de mando evalúa de los datos de la instrucción y el segundo sistema de mando le da una comunicación de retorno al primer sistema de mando.
La invención persigue la finalidad de superar las desventajas mencionadas y posibilitar en particular una simplificación y una sencilla ampliabilidad de la comunicación entre dos o más sistemas de mando, debiendo quedar considerablemente excluidas las capas intermedias cargadas de errores.
Según la invención la finalidad mencionada es alcanzada con un procedimiento de la clase mencionada al comienzo, donde un primer sistema de mando genera una instrucción a transmitir con datos a enviar a un segundo sistema de mando y con una identificación que representa a este segundo sistema de mando, se dota a la instrucción a transmitir de una identificación del primer sistema de mando y el primer sistema de mando envía la instrucción a transmitir al segundo sistema de mando, y donde el segundo sistema de mando evalúa los datos de la instrucción y el segundo sistema de mando le da una comunicación de retorno al primer sistema de mando, estando dicho procedimiento caracterizado por el hecho de que el segundo sistema de mando compila los datos recibidos en un código interno.
La invención prevé una instrucción de una línea que además de los datos propiamente dichos a transmitir (estados físicos y/u órdenes de mando) contiene una identificación del sistema de mando receptor. Gracias a ello se logra una sencilla ampliabilidad de la comunicación mediante órdenes libremente programables como parámetros de la instrucción de mando (órdenes en cadena), gracias a lo cual es también posible una incrementada transparencia en el programa de usuario mediante el uso de órdenes libremente programables como parámetros de las instrucciones y con ello el uso de correspondientes nombres para las órdenes en lugar de designaciones de E/S. Mediante la invención resulta muy sencilla la ampliabilidad, pues únicamente debe declararse una nueva variable global, que puede ser entonces usada en el sistema de mando receptor, pues el mismo puede manipular cualquier variable global. La ampliabilidad no queda limitada por los recursos de hardware. Además de datos, o sea en particular además de estados físicos, pueden transmitirse así también órdenes. Mediante la invención la transmisión de datos y órdenes puede hacerse de manera flexible y sin una aparatosidad de hardware y de software en régimen de intercambio de robots a robots sin establecimiento de una jerarquía, lo cual es una condición previa necesaria para la cooperación directa de robots en sí pariguales. Una ventaja adicional radica en el hecho de que la transmisión se produce sincrónicamente, de forma tal que el iniciador de la transmisión recibe una comunicación de retorno directa sobre el éxito de la acción, y tan sólo puede seguir trabajando cuando la orden fue ejecutada en el lado contrario. Mediante la invención, con una asignación de valor no tan sólo pueden transmitirse sencillamente datos, sino que también pueden manipularse de manera totalmente apropiada estados del sistema, como la imposición de una modalidad de funcionamiento por pasos o la realización de una selección de frase en el otro programa.
En un perfeccionamiento preferido de la invención está previsto que la orden a transmitir sea formateada como comunicación de UDP, formateándose también como comunicación de UDP en particular la comunicación de retorno del segundo sistema de mando. Finalmente está previsto según la invención que el primer sistema de mando no envíe una instrucción a transmitir a otro sistema de mando hasta haber recibido de éste una comunicación de retorno de que el segundo sistema de mando está listo para la ejecución de una instrucción. Además la instrucción a transmitir puede contener como constante o variable tanto la identificación del sistema de mando al cual va dirigida como los datos a transmitir.
Adicionales ventajas y características de la invención se desprenden de las reivindicaciones y de la siguiente descripción, en la que se aclara en detalle un ejemplo de realización de la invención haciendo referencia al dibujo. Las distintas figuras muestran lo siguiente:
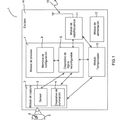
La Fig. 1, una representación esquemática de varios sistemas de mando que cooperan entre sí;
la Fig. 2, el desarrollo básico del procedimiento según la invención para el intercambio de datos entre dos sistemas de mando; y
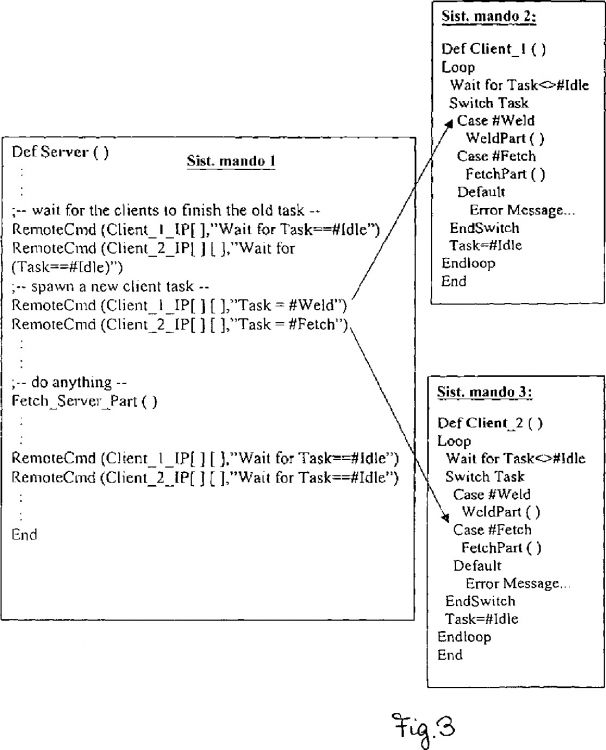
la Fig. 3, una representación más exacta del procesamiento de los datos a intercambiar entre sistemas de mando en último lugar.
La Figura 1 muestra a título de ejemplo cuatro sistemas de mando 1 a 4 que cooperan entre sí, a los cuales les están asignadas sendas direcciones inequívocas, como la IP="192.0.1.1" para el sistema de mando 1. Cada sistema de mando 1 a 4 contiene un ordenador 1.1 en el que se desarrolla un programa de mando para una máquina, y en particular para un robot gobernado por el respectivo sistema de mando. Además de ello, cada sistema de mando contiene un controlador de Ethernet 1.2 a 4.2, así como una tarjeta de red 1.3 a 4.3 para la comunicación con una red 5 a través de la cual los sistemas de mando 1 a 4 quedan en comunicación entre sí ya sea directamente o bien a través de un conmutador (switch). No están representadas las memorias contenidas en un sistema de mando, tales como memorias de sólo lectura, memorias volátiles, etc., así como los periféricos, tales como en particular los aparatos de entrada y salida.
Para el intercambio de datos entre dos sistemas de mando 1 y 2, primeramente un programa de mando que corre en el primer sistema de mando genera una instrucción a transmitir, que por un lado contiene los datos a transmitir, tales como parámetros físicos del robot asignado al primer sistema de mando o bien también instrucciones para la modificación de parámetros físicos en un robot asignado al segundo sistema de mando. La instrucción a transmitir contiene además de ello la dirección del sistema de mando al que deben transmitirse los datos o las instrucciones generados mediante el programa que corre en el primer ordenador. Además se dota a esta instrucción de la dirección propia del emisor. Esta comunicación es entonces transmitida como comunicación de UDP a través de la red al segundo sistema de mando (Figura...
Reivindicaciones:
1. Procedimiento de intercambio de datos entre sistemas de mando de máquinas, y en particular de robots, donde un primer sistema de mando genera una instrucción a transmitir con datos a enviar a un segundo sistema de mando y con una identificación que representa a este segundo sistema de mando, se dota a la instrucción a transmitir de una identificación del primer sistema de mando y el primer sistema de mando envía la instrucción a transmitir al segundo sistema de mando, y donde el segundo sistema de mando evalúa los datos de la instrucción y el segundo sistema de mando le da una comunicación de retorno al primer sistema de mando, estando dicho procedimiento caracterizado por el hecho de que el segundo sistema de mando compila los datos recibidos en un código interno.
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que la instrucción a transmitir es formateada como comunicación de UDP.
3. Procedimiento según la reivindicación 1 o 2, caracterizado por el hecho de que la comunicación de retorno del segundo sistema de mando es formateada como comunicación de UDP.
4. Procedimiento según una de las reivindicaciones precedentes, caracterizado por el hecho de que cuando los datos transmitidos contienen una orden de mando, el segundo sistema de mando la ejecuta.
5. Procedimiento según una de las reivindicaciones precedentes, caracterizado por el hecho de que el primer sistema de mando no envía una instrucción a transmitir a otro sistema de mando hasta haber recibido de éste una comunicación de retorno de que el segundo sistema de mando está listo para la ejecución de una instrucción.
6. Procedimiento según una de las reivindicaciones precedentes, caracterizado por el hecho de que la instrucción a transmitir puede contener como constante o como variable tanto la identificación del sistema de mando al que se dirige como los datos a transmitir.
7. Procedimiento según una de las reivindicaciones precedentes, caracterizado por órdenes para la selección de un programa en el segundo sistema de mando (RUN-ProgName ()), la reinicialización de un programa del segundo sistema de mando (RESET), el descarte de un programa del segundo sistema de mando (CANCEL), asignaciones de valor y/u órdenes de mantenerse a la espera de recibir valores booleanos.
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO PARA CONTROLAR UNA PLURALIDAD DE MANIPULADORES, del 8 de Septiembre de 2011, de KUKA ROBOTER GMBH: Procedimiento para controlar una pluralidad de manipuladores, con cierto número de unidades de mando que están asignadas a los manipuladores de […]
PROCEDIMIENTO, NODO Y RED PARA EL ENVÍO CÍCLICO DE TELEGRAMAS DE ETHERNET, del 31 de Marzo de 2011, de BECKHOFF AUTOMATION GMBH: Procedimiento para el envío de datos en forma de telegramas de Ethernet a través de un nodo en un recorrido de transmisión de Ethernet, con las siguientes etapas del […]
PROCEDIMIENTO Y SISTEMA DE CONTROL DE PROCESOS PARA OPERAR UNA INSTALACIÓN TÉCNICA, del 16 de Febrero de 2011, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para operar una instalación técnica con cierta cantidad de equipos de campo (FD) para la supervisión y el control de componentes de la instalación […]
 DISPOSITIVO DE CAMPO PARA UN SISTEMA DE BUS DE CAMPO, del 21 de Octubre de 2010, de ABB SERVICE S.R.L: Dispositivo de campo adecuado para la instalación en un ambiente industrial comprendiendo medios para la conexión a una red de bus de campo y medios de […]
DISPOSITIVO DE CAMPO PARA UN SISTEMA DE BUS DE CAMPO, del 21 de Octubre de 2010, de ABB SERVICE S.R.L: Dispositivo de campo adecuado para la instalación en un ambiente industrial comprendiendo medios para la conexión a una red de bus de campo y medios de […]
 RED INTERFAZ SENSOR-ACTUADOR PARA GRANDES DISTANCIAS, del 14 de Junio de 2010, de SIEMENS AKTIENGESELLSCHAFT: Red interfaz sensor-actuador con una pluralidad de participantes en la comunicación , los cuales se encuentran conformados como maestro o como sensores […]
RED INTERFAZ SENSOR-ACTUADOR PARA GRANDES DISTANCIAS, del 14 de Junio de 2010, de SIEMENS AKTIENGESELLSCHAFT: Red interfaz sensor-actuador con una pluralidad de participantes en la comunicación , los cuales se encuentran conformados como maestro o como sensores […]
 UNIDAD DEPENDIENTE, UNIDAD DE NODO, CONTROLADORES Y SISTEMA DE RED, del 6 de Noviembre de 2009, de OMRON CORPORATION: Un dispositivo de nodo que puede conectarse a una red para automatizar una factoría (FA), que comprende: medios para obtener, a partir de una primera unidad dependiente […]
UNIDAD DEPENDIENTE, UNIDAD DE NODO, CONTROLADORES Y SISTEMA DE RED, del 6 de Noviembre de 2009, de OMRON CORPORATION: Un dispositivo de nodo que puede conectarse a una red para automatizar una factoría (FA), que comprende: medios para obtener, a partir de una primera unidad dependiente […]
 METODO Y SISTEMA UNIVERSAL Y RECONFIGURABLE DE LECTURA REMOTA DE CONTADORES O EQUIPOS PROVISTOS DE INDICADORES VISUALES, del 16 de Noviembre de 2007, de SERVICIOS INFORMATICOS KIFER, S.L.
UNIVERSIDAD DEL PAIS VASCO (UPV-EHU)
SERVICIOS DE TXINGUIDI, S.A.
UNIVERSIDAD AUTONOMA DE BARCELONA - UAB
CSIC-CONSEJO SUP. INVEST. CIENTIFICAS: Método y sistema universal y reconfigurable de lectura remota de contadores o equipos provistos de indicadores visuales.#Sistema de lectura remota de cortadores o […]
METODO Y SISTEMA UNIVERSAL Y RECONFIGURABLE DE LECTURA REMOTA DE CONTADORES O EQUIPOS PROVISTOS DE INDICADORES VISUALES, del 16 de Noviembre de 2007, de SERVICIOS INFORMATICOS KIFER, S.L.
UNIVERSIDAD DEL PAIS VASCO (UPV-EHU)
SERVICIOS DE TXINGUIDI, S.A.
UNIVERSIDAD AUTONOMA DE BARCELONA - UAB
CSIC-CONSEJO SUP. INVEST. CIENTIFICAS: Método y sistema universal y reconfigurable de lectura remota de contadores o equipos provistos de indicadores visuales.#Sistema de lectura remota de cortadores o […]
MÉTODO Y SISTEMA DE CONTROL PARA CONTROLAR UNA PLURALIDAD DE ROBOTS, del 16 de Junio de 2011, de KUKA ROBOTER GMBH: Método para controlar un sistema de una pluralidad de robots, comprendiendo dicho sistema: una pluralidad de controladores, que tienen cada uno de ellos un sistema de movimiento […]