MAQUINA AUTOMATICA PARA LA RECOLECCION DE FRUTOS.
1. Máquina automática para recolección de frutos, que constituyéndose a partir de un bastidor o estructura general rodante con ruedas establecidas inferiormente,
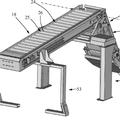
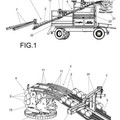
se caracteriza porque dicho bastidor presenta tanto sus laterales como puente superior de forma telescópica y adaptable a la anchura y altura de los árboles o plantas cuyo fruto se pretende recolectar; habiéndose previsto que en uno de los laterales se incluya un puesto de mando para un operario de manipulación de la máquina, mientras que en el lateral opuesto se ha previsto un motor de accionamiento del sistema de traslación; contando además entre los laterales del bastidor con unos brazos articulados que soportan una lona capacitada de plegarse y desplegarse de acuerdo con el plegado y desplegado de dichos brazos articulados, lona que desemboca en un canal o conducto de recogida de los frutos desde el cual son enviados mediante un sinfín hasta un lugar de carga o almacenamiento, contando además en uno de los brazos articulados con un vibrador adaptable al tronco del árbol para la vibración de éste y caída de los frutos a recoger sobre la correspondiente lona en disposición desplegada.2. Máquina automática para recolección de frutos, según reivindicación 1, caracterizada porque se incluyen medios de accionamiento automático de la máquina, tanto en su desplazamiento como en la operatividad de sus componentes, accionados a distancia mediante GPS, estableciendo un funcionamiento autónomo de la propia máquina.3. Máquina automática para recolección de frutos, según reivindicaciones anteriores, caracterizada porque la telescopicidad de los laterales y puente superior del bastidor general, se acciona mediante medios hidráulicos y/o motorizados.4. Máquina automática para recolección de frutos, según reivindicaciones anteriores, caracterizada porque en correspondencia con el puesto de mando para el operario, se incluye una pantalla táctil asociada a un sistema de videovigilancia que posibilita la visualización en tiempo real del estado de los árboles.5. Máquina automática para recolección de frutos, según reivindicaciones anteriores, caracterizada porque incluye medios de aplicación de productos químicos e incluso poda de los propios árboles
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201131005.
Solicitante: MAQUINARIA Y TALLER SALA BROTONS, S.L.L.
Nacionalidad solicitante: España.
Provincia: ALICANTE.
Inventor/es: RESTA PARRA,MIGUEL.
Fecha de Solicitud: 29 de Septiembre de 2011.
Fecha de Publicación: .
Fecha de Concesión: 6 de Febrero de 2012.
Clasificación PCT:
- A01D46/24 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01D RECOLECCION; SIEGA. › A01D 46/00 Recolección de frutas, hortalizas, lúpulo o productos similares; Dispositivos para sacudir los árboles o arbustos. › Dispositivos para la recolección de manzanas o frutos similares (A01D 46/26 tiene prioridad).
Fragmento de la descripción:
MÁQUINA AUTOMÁTICA PARA LA RECOLECCIÓN DE FRUTOS
OBJETO DE LA INVENCIÓN
La presente invención se refiere a una máquina automática para la recolección de frutos, cuya evidente finalidad es la de llevar a cabo la recogida de determinados tipos de productos frutícolas y a la vez transferirles hasta una posición de carga o de almacenamiento para los mismos.
El objeto de la invención es conseguir una automatización en la recolección de frutos y un funcionamiento autónomo de la máquina, pudiendo ser ésta manejada a distancia mediante GPS.
ANTECEDENTES DE LA INVENCIÓN
Como es sabido, determinados tipos de frutos se recolectan a veces de forma manual o bien con herramientas manuales e incluso automática, de manera que en el caso de tratarse de herramientas manuales, el tiempo de recogida se prolonga notablemente, con posibilidad de pérdidas en el caso de llevarse a cabo la recolección en tiempo de lluvia o frío, mientras que cuando se utilizan máquinas o dispositivos automáticos, éstos son complejos estructuralmente y requieren siempre de manipuladores tanto para dirigir la propia máquina como para llevar a cabo la traslación de los frutos recogidos hasta un lugar de carga o almacenamiento.
DESCRIPCIÓN DE LA INVENCIÓN
La máquina que se preconiza ha sido concebida para resolver la problemática anteriormente expuesta, en base a una solución sencilla pero eficaz, ya que es una máquina que independientemente de que pueda ser manipulada de forma manual, presenta la particularidad de que su manipulación se realizará preferentemente de forma autónoma mediante un control con GPS.
Mas concretamente la máquina de la invención se constituye a partir de una estructura o bastidor con un contorno preferentemente rectangular y con una altura apropiada de acuerdo a la altura o tamaño de los árboles o plantas cuyos frutos se pretenden recolectar, por lo que los puntales laterales del propio bastidor o estructura son telescópicos para variar la altura en mayor o menor medida y adaptarse así a la altura de los árboles o plantas.
En dicho bastidor están establecidos un puesto de mando, así como un motor para el accionamiento del sistema motriz y con ello permitir desplazarse a la máquina sin ningún tipo de problema, pudiendo subir pendientes y desniveles y presentando tracción a las cuatro ruedas, ya que el bastidor o estructura general presenta una rueda en cada uno de los extremos inferiores de la estructura rectangular que establece dicho bastidor, con la particularidad de que las ruedas pueden girar en todos sus sentidos mediante un sistema hidráulico, pudiendo bloquear a su antojo cualquiera de las mismas, dando mas versatilidad a la propia máquina.
Todos los movimientos se realizarán automáticamente mediante autómata programable, incluidos los de telescopicidad del bastidor
En cuanto al puesto de mando establecido en uno de los laterales de dicho bastidor, permitirá utilizar la máquina como un vehículo guiado por un joystick y asiento para operario, disponiendo también de una pantalla táctil para su manejo, lo cual permite llevar a cabo una manipulación o accionamiento de la máquina de tres formas diferentes, una manual y que se maneja mediante joystick y pantalla táctil, realizando todos los movimientos por el operario que se sienta en el puesto de mando referido. Una segunda forma de manipulación y trabajo de la máquina es semi-automática, situando la máquina manualmente sobre el árbol o planta y realizando el ciclo de recolección, mientras que el tercer tipo de manipulación de la máquina es totalmente automática realizando los procesos a distancia mediante GPS. La máquina además dispondrá de medios para llevar a cabo tratamiento de las plantas, para que mediante impulsión y pulverización se 20 apliquen productos químicos que permiten el tratado de los árboles o plantas. La máquina incluye además lateralmente y por el interior del bastidor unos brazos articulados a los que está relacionada una lona que 25 dependiendo del plegado o desplegado de dichos brazos, se lleva a cabo la recogida de la lona o el desplegado de la misma, en este último caso para recepcionar los frutos que caigan del árbol, caída que se producirá por vibración del tronco de dicho árbol, mediante un vibrador relacionado con uno de los conjuntos de brazos articulados situados por la parte interna de uno de los laterales del bastidor de la propia máquina. desplazamiento de la propia máquina, incluyendo en uno de sus laterales un puesto de control (3) para un operario o conductor que llevaría a cabo el manejo de la máquina en caso de no utilizar el sistema automático, mientras que en el lateral opuesto se ha previsto un motor (4) de accionamiento del sistema de traslación, dotando de tracción a las cuatro ruedas para permitir la subida, bajada por pendientes y desplazamiento por cualquier superficie. Lateralmente y en correspondencia con la parte interna de los laterales del bastidor (1) se han previsto unos brazos articulados (5) que 10 soportan una lona (6) receptora de los frutos a recolectar, de manera tal que esos brazos (5) pueden plegarse y desplegarse y con ello llevar a cabo el plegado y desplegado de la lona (6) , de manera que en la posición de extensibilidad o de desplegado de ésta ocupará prácticamente toda la anchura comprendida entre los lados del bastidor (1) y por lo tanto toda la 15 amplitud del árbol que se sitúe... o estructura original, que puede llevarse a cabo mediante medios hidráulicos
Reivindicaciones:
4ª. Máquina automática para recolección de frutos, según reivindicaciones anteriores, caracterizada porque en correspondencia con el puesto de mando para el operario, se incluye una pantalla táctil asociada a un sistema de video vigilancia que posibilita la visualización en tiempo real del estado de los árboles.
5ª. Máquina automática para recolección de frutos, según reivindicaciones anteriores, caracterizada porque incluye medios de 10 aplicación de productos químicos e incluso poda de los propios árboles.
Patentes similares o relacionadas:
 Máquina y procedimiento para la recolección de frutas, del 29 de Enero de 2020, de Billo S.r.l: Máquina para la recolección de fruta, que comprende:
- una estructura de soporte destinada a quedar apoyada contra el suelo;
- por lo […]
Máquina y procedimiento para la recolección de frutas, del 29 de Enero de 2020, de Billo S.r.l: Máquina para la recolección de fruta, que comprende:
- una estructura de soporte destinada a quedar apoyada contra el suelo;
- por lo […]
SISTEMA INTEGRAL DE CULTIVO Y RECOLECCIÓN DE FRUTALES EN LIÑO O SETO, del 1 de Febrero de 2018, de DELGADO JIMENEZ, Santos: Sistema integral de cultivo y recolección de frutales en liños o setos. Se trata de una máquina que incluye un bastidor formado por puentes asociados a estructuras […]
SISTEMA PARA RECOLECCIÓN Y TRANSPORTE DE FRUTAS O SIMILARES, DESDE LADERAS DE CERROS O LO SIMILAR, del 8 de Septiembre de 2017, de MIRANDA NARANJO, Oscar Iván: Sistema para la recolección y transporte de frutas, desde laderas o pendientes de cerros o lo similar, está conformada con un cuerpo tubular […]
RECOLECTOR DE FRUTA, del 24 de Julio de 2017, de SUKRUANGSAP, Apichat: Un recolector de fruta incluye una primera y segunda secciones curvas, un mango y una bolsa. La primera y segunda secciones curvas están curvadas hacia fuera para formar […]
Cinta transportadora, del 18 de Mayo de 2016, de Revo S.r.l: Estructura de cinta transportadora , que comprende una cinta transportadora , fijada a un bastidor, que gira alrededor de un primer tambor y un […]
 Sistema de transporte para fruta y objetos similares, del 16 de Marzo de 2016, de Whooshh Innovations LLC: Dispositivo para transportar artículos (F), que comprende:
un tubo adaptado para recibir y transportar un artículo;
una pluralidad de deflectores deformables […]
Sistema de transporte para fruta y objetos similares, del 16 de Marzo de 2016, de Whooshh Innovations LLC: Dispositivo para transportar artículos (F), que comprende:
un tubo adaptado para recibir y transportar un artículo;
una pluralidad de deflectores deformables […]
Aparato articulado como herramienta de mano con mango desplazado, del 12 de Noviembre de 2014, de DR. SLICK COMPANY: Un aparato articulado como herramienta de mano, que comprende: un par de miembros alargados acoplados para su articulación […]
 SISTEMA DE TRANSPORTE DE FRUTA U HORTALIZA PARA UNA MÁQUINA RECOLECTORA Y MÁQUINA RECOLECTORA QUE INCLUYE DICHO SISTEMA, del 16 de Septiembre de 2014, de ARGILÉS MAJÀ, Elisa: Sistema de transporte de fruta u hortaliza para una máquina recolectora y máquina recolectora que incluye dicho sistema.
Comprende una pluralidad […]
SISTEMA DE TRANSPORTE DE FRUTA U HORTALIZA PARA UNA MÁQUINA RECOLECTORA Y MÁQUINA RECOLECTORA QUE INCLUYE DICHO SISTEMA, del 16 de Septiembre de 2014, de ARGILÉS MAJÀ, Elisa: Sistema de transporte de fruta u hortaliza para una máquina recolectora y máquina recolectora que incluye dicho sistema.
Comprende una pluralidad […]