GRAPADORA QUIRÚRGICA CON ARTICULACIÓN UNIVERSAL Y DISPOSITIVO DE SUJECIÓN PREVIA DEL TEJIDO.
Un conjunto de herramienta (10) para una grapadora quirúrgica para utilizar en un procedimiento quirúrgico endoscópico,
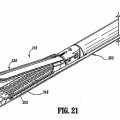
que comprende: un yunque (110) y un conjunto de cartucho (200) y un conjunto de canal (120) que soporta al conjunto de cartucho, teniendo el conjunto de cartucho una pluralidad de grapas, siendo el conjunto de canal movible en relación al conjunto de yunque para mover el conjunto de cartucho en relación al conjunto de yunque entre una posición abierta y una posición aproximada, el conjunto de cartucho y el conjunto de yunque definiendo un espacio de tejido en la posición aproximada; un collarín de sujeción (140) colocado adyacente al extremo proximal del conjunto de canal y siendo el extremo proximal del conjunto de yunque movible desde una primera posición hasta una segunda posición para efectuar el movimiento del conjunto de yunque en relación al conjunto de cartucho desde la posición abierta hacia la posición aproximada; un sistema de accionamiento para accionar el collarín de sujeción para moverlo desde la primera posición hasta la segunda posición, caracterizado por: un miembro de sujeción dinámico (150) colocado de manera movible en relación al conjunto de yunque y al conjunto de canal, siendo el miembro de sujeción dinámico movible distalmente desde una primera posición hasta una segunda posición para definir un espacio de tejido máximo entre el conjunto de yunque y el conjunto de cartucho adyacente al miembro de sujeción dinámico durante la eyección de la pluralidad de grapas desde el conjunto de cartuchos en el que el miembro de sujeción dinámico incluye un primer enlace mecánico (159) que se aplica de modo deslizante al conjunto de yunque y un segundo enlace mecánico (152) que se aplica deslizablemente al conjunto de cartucho, estando el primer y segundo enlaces del miembro de sujeción dinámico en coincidencia sustancial vertical relativamente entre sí para oponerse a fuerzas expansivas asociadas con la sujeción y grapado del tejido y para definir el espacio máximo de tejido entre las superficies de contacto de los tejidos de los conjuntos de yunque y de cartucho durante el grapado; y el sistema de accionamiento que comprende un cable (900) para mover el collarín de sujeción desde la primera posición hasta la segunda posición y hacia y por encima de una superficie de leva (115) en el conjunto de yunque, en el que el cable unido al collarín, es alimentado a través de un paso o pasadizo en el conjunto de yunque y es alimentado de manera proximal, para ser alimentado proximalmente a través de un árbol de la grapadora quirúrgica para que la acción del cable en una dirección proximal fuerce de manera distal al collarín de sujeción contra la superficie de leva
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06025701.
Solicitante: TYCO HEALTHCARE GROUP LP.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: Mail Stop: 8 N-1, 555 Long Wharf Drive New Haven, CT 06511 ESTADOS UNIDOS DE AMERICA.
Inventor/es: OLSON, LEE, ANN, RACENET, DAVID C., EMMONS,CLIFFORD,L, ROY,PHILIP, BEARDSLEY,JOHN W, STEARNS,RALPH.
Fecha de Publicación: .
Fecha Solicitud PCT: 6 de Octubre de 2003.
Clasificación Internacional de Patentes:
- A61B17/072B
Clasificación PCT:
- A61B17/072 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para aplicar una hilera de grapas en una sola operación.
Países PCT: Alemania, España, Francia, Reino Unido, Italia, Irlanda.
PDF original: ES-2364448_T3.pdf
Fragmento de la descripción:
ANTECEDENTES
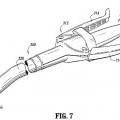
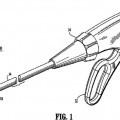
Campo Técnico Esta aplicación se refiere a un aparato quirúrgico para grapar, y más particularmente, a una grapadora quirúrgica, endoscópica articulada que aplica secuencialmente una pluralidad de sujetadores quirúrgicos al tejido del cuerpo y subsiguientemente hace una incisión en el tejido sujetado.
Antecedentes de la Técnica Relacionada Dispositivos quirúrgicos en los que el tejido es primero agarrado o sujetado entre la estructura de mordazas enfrentadas y a continuación unido mediante sujetadores quirúrgicos son bien conocidos en la técnica. Típicamente, es empleado una cuchilla después de que el tejido es sujetado para cortar el tejido a lo largo de un trayecto de corte preferido. Los sujetadores tienen típicamente forma de grapas quirúrgicas pero otros tipos de sujetadores pueden también ser utilizados para conseguir el mismo o similar propósito.
Instrumentos para este propósito pueden incluir dos miembros alargados que son usados respectivamente para capturar o sujetar el tejido. Típicamente, uno de los miembros lleva un cartucho de grapas que aloja una pluralidad de grapas dispuestas en al menos dos filas laterales mientras el otro miembro tiene un yunque que define una superficie para conformar las patas de la grapa cuando las grapas son accionadas desde el cartucho de grapas. Generalmente, la operación de grapado es efectuada por barras de levas o trineos que tienen superficies de leva que se desplazan longitudinalmente a través del cartucho de grapas y empujadores de grapa que eyectan secuencialmente las grapas del cartucho de grapas. Típicamente, una cuchilla se desplaza entre las filas de grapas para cortar longitudinalmente y/o abrir el tejido grapado entre las filas de grapas conformadas.
Uno de los problemas asociados con los diseños de grapadoras anteriores es la tendencia de que el miembro de sujeción dinámico se tuerza o alabee cuando pasa a través del tejido debido a las grandes fuerzas generadas durante el grapado y el corte del tejido. Por ejemplo, los diseños del miembro de sujeción dinámico anterior que llevan la cuchilla o superficie de corte proporcionan diseños a modo de voladizo que están diseñados para apretar efectivamente el tejido delante de la hoja de la cuchilla y el trineo de conformado de la grapa para forzar fluidos desde el tejido que mejora el grapado del tejido y contribuye a un grapado del tejido satisfactorio. Sin embargo, las grandes fuerzas requeridas para grapar y hacer una incisión del tejido tienden a situar tensiones indebidas en el diseño de la cuchilla en voladizo que puede hacer que la cuchilla se tuerza o alabee durante la traslación requiriendo a menudo que el cirujano dispare la grapa muy lentamente a través de mayores estructuras de tejido para evitar la posibilidad de que la cuchilla se desplace fuera de la línea.
El documento EP 0593920 describe un aparato quirúrgico para grapar que comprende un alojamiento de cartucho, un miembro de yunque y un tubo de collarín. El tubo de collarín funciona para mover el miembro de yunque hasta una posición cerrada con respecto al cartucho.
El documento US 4.250.817 describe un instrumento quirúrgico para grapar que tiene patas o herrajes de apoyo que se acoplan a una respectiva mordaza del instrumento y proporciona un efecto de sujeción adyacente a donde el grapado está sucediendo.
Es un objeto de esta descripción proporcionar una grapadora quirúrgica que tiene un accionador, preferiblemente, un miembro de sujeción dinámico que mejora el grapado del tejido forzando fluidos fuera del tejido sujetado antes de eyectar las grapas y grapar el tejido. Otro objeto de esta descripción es proporcionar un miembro de sujeción dinámico que aplica sustancialmente una presión de sujeción sobre el conjunto de yunque y cartucho del miembro de herramienta o útil de una grapadora quirúrgica cuando el miembro de sujeción dinámico se traslada a lo largo y a través del conjunto de herramienta.
Otro objeto de esta descripción es proporcionar un miembro de sujeción dinámico que ayuda a proporcionar un espacio de tejido uniforme entre las superficies de contacto con el tejido de un yunque y un cartucho de grapas en el área inmediata y durante el conformado progresivo de la grapa, secuencial y sujeción del tejido, así como en el área de y durante el corte del tejido, si el corte está siendo realizado.
COMPENDIO La presente invención proporciona un conjunto de herramienta tal y como se describe en la reivindicación 1. La presente invención se refiere a un conjunto de herramienta para una grapadora quirúrgica, el conjunto de herramienta incluye un miembro de canal para soportar un cartucho de grapas a él y un yunque para deformar una pluralidad de grapas empujadas desde el cartucho de grapas contra este. Al menos está incluido un trineo que se mueve desde una primera posición fuera de la aplicación operativa con la pluralidad de grapas o empujadores de grapa a unas posiciones subsiguientes que fuerzan progresiva y secuencialmente las grapas desde el cartucho de grapas a través del tejido dispuesto en el espacio entre el yunque y el cartucho de grapas y contra el yunque de tal manera que las grapas se deforman y grapan o sujetan el tejido. Típica y preferiblemente, el trineo incluye al menos una superficie inclinada que durante el movimiento del mismo se aplica a empujadores de grapa que fuerzan las grapas desde el cartucho de grapas y contra el yunque.
La presente descripción incluye también un miembro de sujeción dinámico que es móvil con el trineo y que incluye un primer enlace mecánico o entrecara que se aplica al yunque y un segundo enlace mecánico sustancialmente opuesto que se aplica al conjunto de canal. El primer y segundo enlaces mecánicos del miembro de sujeción dinámico están en coincidencia sustancial vertical relativamente entre sí para oponerse a las fuerzas asociadas con la sujeción y grapado del tejido y para mantener un espacio sustancialmente uniforme entre yunque y el cartucho de grapas durante el grapado.
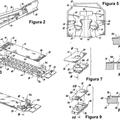
Preferiblemente, el primer enlace mecánico del miembro de sujeción dinámico incluye un pasador que se traslada dentro de una ranura correspondiente dispuesta dentro del yunque al producirse el movimiento del conjunto de sujeción. El segundo enlace mecánico del miembro de sujeción dinámico incluye preferiblemente un soporte central o una extensión hacia arriba que se traslada dentro una ranura correspondiente dispuesta dentro del conjunto de canal al producirse el movimiento del miembro de sujeción dinámico. Ventajosamente, el pasador y la pestaña están dimensionados para oponerse a las fuerzas asociadas con el trineo forzando la pluralidad de grapas contra el yunque para grapar el tejido dispuesto entre ellos.
El conjunto de herramienta incluye un collarín de sujeción selectivamente móvil que carga contra una superficie de leva en el yunque para cerrar el yunque con relación al cartucho de grapa y sujeta el tejido entre ellos.
Otra realización de acuerdo con la presente descripción se refiere a un conjunto de articulación para un dispositivo de grapado quirúrgico que incluye un árbol alargado que tiene extremos proximal y distal y un eje longitudinal “X” definido a su través. El árbol puede girar selectivamente alrededor del eje longitudinal “X”. El conjunto de articulación incluye también un conjunto de herramienta que se une al extremo distal del eje e incluye un adaptador de tubo que se monta pivotablemente un bloque de pivotamiento para permitir el movimiento pivotable del conjunto de herramienta alrededor de un eje “Y” definido perpendicular al eje “X” y un eje “Z” definido perpendicular al eje “X”.
Preferiblemente, el conjunto de herramienta incluye también un yunque que tiene una superficie inferior y un conjunto de canal para soportar un cartucho de grapas en él. El cartucho de grapas incluye una pluralidad de grapas en él y una superficie superior que contacta con el tejido que se opone a la superficie inferior del yunque. Un trineo móvil está incluido también que tiene al menos una superficie inclinada que está diseñada para forzar que la pluralidad de grapas se deforme contra la superficie inferior del yunque. El conjunto de herramienta incluye también un miembro de sujeción dinámico que se mueve con el trineo para cortar el tejido después de la deformación de las grapas contra el yunque. Preferiblemente, la rotación del árbol alrededor del eje longitudinal “X” gira correspondientemente el conjunto de herramienta alrededor... [Seguir leyendo]
Reivindicaciones:
1. Un conjunto de herramienta (10) para una grapadora quirúrgica para utilizar en un procedimiento quirúrgico endoscópico, que comprende:
un yunque (110) y un conjunto de cartucho (200) y un conjunto de canal (120) que soporta al conjunto de cartucho, teniendo el conjunto de cartucho una pluralidad de grapas, siendo el conjunto de canal movible en relación al conjunto de yunque para mover el conjunto de cartucho en relación al conjunto de yunque entre una posición abierta y una posición aproximada, el conjunto de cartucho y el conjunto de yunque definiendo un espacio de tejido en la posición aproximada; un collarín de sujeción (140) colocado adyacente al extremo proximal del conjunto de canal y siendo el extremo proximal del conjunto de yunque movible desde una primera posición hasta una segunda posición para efectuar el movimiento del conjunto de yunque en relación al conjunto de cartucho desde la posición abierta hacia la posición aproximada; un sistema de accionamiento para accionar el collarín de sujeción para moverlo desde la primera posición hasta la segunda posición, caracterizado por:
un miembro de sujeción dinámico (150) colocado de manera movible en relación al conjunto de yunque y al conjunto de canal, siendo el miembro de sujeción dinámico movible distalmente desde una primera posición hasta una segunda posición para definir un espacio de tejido máximo entre el conjunto de yunque y el conjunto de cartucho adyacente al miembro de sujeción dinámico durante la eyección de la pluralidad de grapas desde el conjunto de cartuchos en el que el miembro de sujeción dinámico incluye un primer enlace mecánico (159) que se aplica de modo deslizante al conjunto de yunque y un segundo enlace mecánico
(152) que se aplica deslizablemente al conjunto de cartucho, estando el primer y segundo enlaces del miembro de sujeción dinámico en coincidencia sustancial vertical relativamente entre sí para oponerse a fuerzas expansivas asociadas con la sujeción y grapado del tejido y para definir el espacio máximo de tejido entre las superficies de contacto de los tejidos de los conjuntos de yunque y de cartucho durante el grapado; y el sistema de accionamiento que comprende un cable (900) para mover el collarín de sujeción desde la primera posición hasta la segunda posición y hacia y por encima de una superficie de leva (115) en el conjunto de yunque, en el que el cable unido al collarín, es alimentado a través de un paso o pasadizo en el conjunto de yunque y es alimentado de manera proximal, para ser alimentado proximalmente a través de un árbol de la grapadora quirúrgica para que la acción del cable en una dirección proximal fuerce de manera distal al collarín de sujeción contra la superficie de leva.
2. Un conjunto de herramienta de acuerdo con la reivindicación 1, en el que la pluralidad de grapas están alineadas en una pluralidad de filas lineales.
3. Un conjunto de herramienta de acuerdo con cualquiera de las reivindicaciones 1 y 2, en el que además incluye un trineo (160) que es móvil con el miembro de sujeción dinámico a través del conjunto de canal desde una primera posición a una posición subsiguiente para eyectar operativamente la pluralidad de grapas desde el conjunto de cartucho a través del tejido y contra el conjunto de yunque para grapar el tejido dispuesto entre el conjunto de yunque y el conjunto de cartucho.
4. Un conjunto de herramienta de acuerdo con una cualquiera de las reivindicaciones precedentes, en el que el collarín de sujeción está para sujetar previamente los tejidos entre sí desde el extremo proximal, y el miembro de sujeción dinámico está para sujetar adicionalmente los tejidos entre sí cuando el miembro de sujeción dinámico se mueve distalmente durante el grapado.
5. Un conjunto de herramienta de acuerdo con una cualquiera de las reivindicaciones precedentes, que comprende un accionador para accionar el movimiento del miembro de sujeción dinámico desde la primera posición hasta la segunda posición, comprendiendo el accionador un sistema de poleas que comprende poleas doble o duales (600a, 600b) dispuestas en cualquier lado de un extremo distal del conjunto de cartucho o de canal, siendo dicho sistema de poleas operativo para mover el miembro de sujeción dinámico desde la primera posición a la segunda posición.
6. Un conjunto de herramienta de acuerdo con la reivindicación 5, en el que el sistema de poleas comprende un par de cables (700a, 700b) alimentados distalmente a través del conjunto de cartucho o de canal, alrededor de las poleas y pasando proximalmente hacia el miembro de sujeción dinámico uniéndose al mismo para que una fuerza proximal en los cables correspondientes sea operativa para mover el miembro de sujeción dinámico desde la primera posición a la segunda posición.
7. Un conjunto de herramienta de acuerdo con la reivindicación 5, que comprende una cinta (700c) alimentada distalmente a través de un conjunto de cartucho o de canal, a través o alrededor de las respectivas poleas y pasando proximalmente hacia el miembro de sujeción dinámico y que pasa a través de aberturas en un extremo distal del miembro de sujeción dinámico o pasado dentro de un espacio (163) y aproximadamente detrás de un pasador (610) que está montado a través de las aberturas para que una fuerza proximal en los extremos correspondientes de la cinta mueva el miembro de sujeción dinámico desde la primera posición hasta la segunda posición.
Patentes similares o relacionadas:
DISPOSITIVO MOTRIZ ELECTRO-MECÁNICO PARA USAR CON INSTRUMENTOS DE ANASTOMOSIS, GRAPADO Y RESECCIÓN, del 8 de Febrero de 2012, de TYCO HEALTHCARE GROUP LP: Accesorios quirúrgicos que tienen cada uno funciones distintas y teniendo unos miembros de giro (158a, 158b, 206a, 206b) en los mismos, y un conjunto de controlador […]
DISPOSITIVOS PARA COLOCACIÓN DE DIVISIONES DENTRO DE UN ÓRGANO CORPORAL HUECO, del 14 de Noviembre de 2011, de ETHICON ENDO-SURGERY, INC.: Un dispositivo de gastroplastia, usado para colocar plicaturas dentro de al menos una cavidad, que comprende: un miembro alargado flexible, que […]
INSTRUMENTO QUIRÚRGICO QUE INCLUYE UN CONJUNTO DE BLOQUEO, del 4 de Noviembre de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento quirúrgico que comprende: una parte de mango que incluye un mango móvil ; una parte de cuerpo que se extiende distalmente desde la parte de […]
 GRAPADORA QUIRÚRGICA, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Una grapadora quirúrgica que comprende: una primera mordaza adaptada para recibir un cartucho de grapas en un extremo distal de la […]
GRAPADORA QUIRÚRGICA, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Una grapadora quirúrgica que comprende: una primera mordaza adaptada para recibir un cartucho de grapas en un extremo distal de la […]
ARTICULACIÓN Y MECANISMOS DE FUERZA DE ACTIVACIÓN, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento quirúrgico , que comprende: un mango que presenta un elemento tubular alargado que se extiende distalmente desde […]
 SISTEMA DE RETENCIÓN DE APOYO DE GRAPAS, del 5 de Mayo de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento de grapado quirúrgico que presenta un sistema de retención del material de apoyo que comprende: - un mango ; - un elemento alargado […]
SISTEMA DE RETENCIÓN DE APOYO DE GRAPAS, del 5 de Mayo de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento de grapado quirúrgico que presenta un sistema de retención del material de apoyo que comprende: - un mango ; - un elemento alargado […]
 APARATO GRAPADOR QUIRÚRGICO QUE TIENE UN CONJUNTO APLICADOR DE MATERIAL PARA CIERRE DE HERIDAS, del 27 de Abril de 2011, de TYCO HEALTHCARE GROUP LP: Un aparato grapador quirúrgico para intensificar una o más propiedades de tejido corporal que se repara o se une o que se vaya a reparar o a unir, cuyo […]
APARATO GRAPADOR QUIRÚRGICO QUE TIENE UN CONJUNTO APLICADOR DE MATERIAL PARA CIERRE DE HERIDAS, del 27 de Abril de 2011, de TYCO HEALTHCARE GROUP LP: Un aparato grapador quirúrgico para intensificar una o más propiedades de tejido corporal que se repara o se une o que se vaya a reparar o a unir, cuyo […]
 Estructura para la fijación de material de refuerzo a yunques y cartuchos de grapadoras quirúrgicas, del 29 de Julio de 2020, de Covidien LP (100.0%): Un efector final de una grapadora quirurgica, que comprende:
un par de mordazas que incluyen un cartucho de grapas y un yunque, el cartucho […]
Estructura para la fijación de material de refuerzo a yunques y cartuchos de grapadoras quirúrgicas, del 29 de Julio de 2020, de Covidien LP (100.0%): Un efector final de una grapadora quirurgica, que comprende:
un par de mordazas que incluyen un cartucho de grapas y un yunque, el cartucho […]