Un dispositivo grapador quirúrgico (10) que comprende: una parte alargada (14) del cuerpo;
una parte distal (16) de cabeza que incluye un conjunto (30) de yunque y un conjunto (28) de vaina, soportados en el extremo distal de la parte alargada del cuerpo, incluyendo el conjunto de yunque un conjunto (49) de cabeza del yunque y un vástago (48) del yunque, soportando el conjunto de vaina una pluralidad de grapas, pudiendo desplazarse el conjunto de yunque con respecto al conjunto de vaina entre las posiciones separada y aproximada; y un mecanismo de aproximación que incluye un mando giratorio (22) de aproximación, un miembro (38) de accionamiento y un mecanismo (40, 42, 46) de extensión, pudiendo funcionar el mando de aproximación conectado al miembro de accionamiento y pudiendo accionarse para efectuar el movimiento axial del miembro de accionamiento en una primera distancia; caracterizado porque el mecanismo de extensión conecta operativamente el miembro de accionamiento con el vástago del yunque, de forma que el movimiento axial del miembro de accionamiento sobre la primera distancia origina el movimiento axial del vástago del yunque con respecto al miembro de accionamiento en una segunda distancia, de manera que la longitud del movimiento del conjunto de yunque con respecto al conjunto de vaina es mayor que la primera distancia
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05005966.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La presente divulgación está relacionada con un dispositivo grapador quirúrgico, para tratar órganos de tejido hueco. Más en particular, la presente divulgación está relacionada con un dispositivo grapador quirúrgico que tiene un mecanismo de aproximación. 2. Antecedentes de la técnica relacionada La anastomosis es la unión quirúrgica de secciones separadas de órganos huecos. Típicamente, un proceso de anastomosis sigue a la cirugía en la cual se extrae una sección enferma o defectuosa de tejido hueco y se unen las secciones finales restantes. Dependiendo del proceso de anastomosis deseado, las secciones finales pueden ser unidas por métodos de reconstrucción circular, de extremo a extremo, o bien de lado a lado de los órganos. En un proceso conocido de anastomosis circular, se unen dos extremos del órgano por medio de un dispositivo grapador que impulsa una serie circular de grapas a través del extremo de cada sección del órgano, y simultáneamente extrae cualquier tejido interior de la serie circular de grapas impulsadas para liberar un conducto tubular. Se describen ejemplos de dispositivos para realizar la anastomosis circular de órganos huecos, en las patentes de Estados Unidos núms. 6.053.390, 5.588.579, 5.119.983, 5.005.749, 4.646.745, 4.576.167 y 4.473.077. Típicamente, estos dispositivos incluyen un vástago alargado que tiene una parte de asa en un extremo proximal del mismo, para efectuar el accionamiento del dispositivo y un componente de sujeción de las grapas dispuesto en el extremo distal del mismo. Un conjunto de yunque, que incluye un vástago del yunque con una cabeza del yunque unida, está montado sobre el extremo distal del dispositivo, contiguamente al componente de sujeción de grapas. Las partes extremas opuestas del tejido del órgano (u órganos) huecos que han de graparse, se sujetan entre la cabeza del yunque y el componente de sujeción de grapas del dispositivo. El tejido sujetado se grapa impulsando una o más grapas desde el componente de sujeción de grapas, de manera que los extremos de las grapas pasan a través del tejido y son deformadas por la cabeza del yunque. Concurrentemente se hace avanzar una cuchilla anular para extraer tejido dentro del órgano hueco y liberar un conducto tubular dentro del órgano. Los dispositivos grapadores quirúrgicos para efectuar una anastomosis circular, se han utilizado también para tratar hemorroides internas en el recto. Durante el uso de un dispositivo grapador circular para el tratamiento de las hemorroides, se inserta la cabeza del yunque y el componente de sujeción de grapas del dispositivo grapador quirúrgico, a través del ano y hacia el interior del recto, con la cabeza del yunque y el componente de sujeción de grapas en una posición abierta o no muy aproximada. De ahí en adelante, se utiliza una sutura de cuerda fruncida para tirar del tejido hemorroidal interno y/o tejido mucoso, hacia la varilla del yunque. A continuación, la cabeza del yunque y el componente de sujeción de grapas son aproximados para sujetar el tejido hemorroidal y/o el tejido mucoso, entre la cabeza del yunque y el componente de sujeción de grapas. Se dispara el dispositivo grapador para retirar el tejido hemorroidal y/o el tejido mucoso y para grapar el tejido cortado. El documento US 5.915.616 divulga un aparato grapador quirúrgico que tiene un mecanismo de cierre para aproximar un miembro de yunque a un conjunto de sujeción. El mecanismo de cierre consiste en un mecanismo de avance que funciona con un avance en dos etapas, de forma que el movimiento inicial del mecanismo de avance desplaza el yunque a una distancia mayor que un desplazamiento subsiguiente del mecanismo de avance. A pesar de su éxito y de la aceptación global de sus muchos beneficios, el uso de grapadores de anastomosis circular presenta un cierto número de retos. En particular, debido a la estrecha proximidad de la cabeza del yunque al componente de sujeción de grapas, la visibilidad del acceso al sitio quirúrgico es limitada, especialmente durante los procesos para el tratamiento de las hemorroides. Más aún, durante la aproximación de la cabeza del yunque con el componente que sujeta las grapas del dispositivo grapador quirúrgico, es a veces difícil posicionar apropiadamente el tejido a retirar dentro del componente de sujeción de grapas del dispositivo grapador quirúrgico. Así, el tejido puede apiñarse en un hueco del tejido definido entre la cabeza del yunque y el componente de sujeción de grapas del instrumento. Esto puede dar como resultado grapas deformadas y/o una eliminación ineficaz de todo el tejido deseado. Consecuentemente, existe una necesidad que continúa en la técnica, de un dispositivo grapador circular para el tratamiento del tejido, que pueda proporcionar una visibilidad y un acceso mejorados a un sitio quirúrgico. Más aún, existe una necesidad que continúa en la técnica, de un dispositivo grapador circular para el tratamiento del tejido, que pueda posicionar rápida y fácilmente el tejido a eliminar, dentro del componente de sujeción de grapas del dispositivo grapador quirúrgico. Sumario La invención proporciona un dispositivo grapador quirúrgico como se define en la reivindicación 1. 2 ES 2 335 591 T3 De acuerdo con la presente divulgación, se divulga un dispositivo grapador quirúrgico para tratar órganos de tejido hueco. El dispositivo grapador quirúrgico incluye un conjunto de asa, una parte alargada del cuerpo, una parte distal de cabeza y un mecanismo de aproximación. La parte alargada del cuerpo se extiende distalmente desde el conjunto de asa. La parte distal de la cabeza está soportada sobre un extremo distal de la parte alargada del cuerpo e incluye un conjunto de yunque y un conjunto de vaina. El conjunto de vaina soporta una pluralidad de grapas. El conjunto de yunque incluye un conjunto de cabeza del yunque y un vástago del yunque. El conjunto del yunque se puede desplazar con respecto al conjunto de vaina, entre posiciones espaciadas y posiciones aproximadas. El mecanismo de aproximación incluye un mando giratorio de aproximación, un miembro de accionamiento y un mecanismo de extensión. El mando de aproximación puede accionarse conectado al miembro de accionamiento y puede accionarse para efectuar un movimiento axial del miembro de accionamiento sobre una primera distancia. El mecanismo de extensión puede funcionar conectado al miembro de accionamiento y al vástago del yunque, de forma que el movimiento axial del vástago del yunque sobre la primera distancia efectúa un movimiento axial del vástago del yunque con respecto al miembro de accionamiento sobre una segunda distancia, de manera que la longitud del movimiento del conjunto de yunque con respecto al conjunto de vaina es mayor que la primera distancia. En un modo de realización, el mecanismo de extensión incluye un vástago alargado de accionamiento que tiene un extremo proximal conectado fijamente al mando de aproximación, y un extremo distal fijado giratoriamente a un extensor tubular, de forma que la rotación del mando de aproximación efectúa la rotación del vástago de accionamiento y del extensor tubular. El extremo distal del extensor tubular puede funcionar conectado al vástago del yunque y el miembro de accionamiento incluye un ánima longitudinal. El vástago de accionamiento se extiende desde el mando de aproximación hasta el extensor tubular, a través del ánima longitudinal. El miembro de accionamiento incluye una extensión distal que tiene una hendidura helicoidal formada a su alrededor. El extensor tubular incluye un miembro de leva situado dentro de la hendidura helicoidal. El accionamiento del mando de aproximación efectúa la rotación del extensor tubular alrededor de la extensión distal del miembro de accionamiento, de forma que el miembro de leva del extensor tubular se desplaza con respecto a la hendidura helicoidal. El movimiento del miembro de leva con respecto a la hendidura helicoidal efectúa un movimiento axial del miembro tubular con respecto al miembro de accionamiento, sobre una segunda distancia. En un modo de realización, el extensor tubular está giratoriamente conectado al extremo proximal del vástago del yunque. El vástago alargado de accionamiento puede incluir al menos una superficie plana y el extensor tubular puede incluir un tornillo de fijación para fijar giratoriamente el extensor tubular al vástago de accionamiento. En otro modo de realización, el mecanismo de extensión incluye un manguito de extensión que tiene un miembro de leva soportado sobre él. Al extremo proximal del vástago del yunque, hay unido fijamente un extensor. Al extremo distal del miembro de accionamiento, hay acoplado giratoriamente una extensión del miembro accionamiento, e incluye un extremo distal fijado con seguridad al manguito de extensión. La extensión del miembro de accionamiento incluye una primera...
Reivindicaciones:
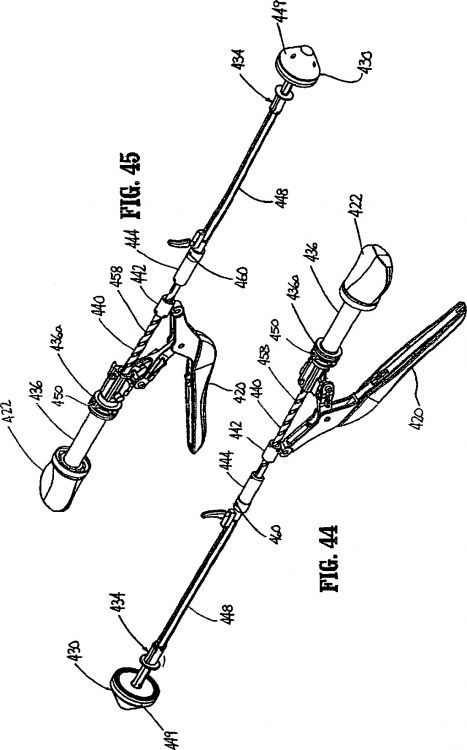
1. Un dispositivo grapador quirúrgico (10) que comprende: una parte alargada (14) del cuerpo; una parte distal (16) de cabeza que incluye un conjunto (30) de yunque y un conjunto (28) de vaina, soportados en el extremo distal de la parte alargada del cuerpo, incluyendo el conjunto de yunque un conjunto (49) de cabeza del yunque y un vástago (48) del yunque, soportando el conjunto de vaina una pluralidad de grapas, pudiendo desplazarse el conjunto de yunque con respecto al conjunto de vaina entre las posiciones separada y aproximada; y un mecanismo de aproximación que incluye un mando giratorio (22) de aproximación, un miembro (38) de accionamiento y un mecanismo (40, 42, 46) de extensión, pudiendo funcionar el mando de aproximación conectado al miembro de accionamiento y pudiendo accionarse para efectuar el movimiento axial del miembro de accionamiento en una primera distancia; caracterizado porque el mecanismo de extensión conecta operativamente el miembro de accionamiento con el vástago del yunque, de forma que el movimiento axial del miembro de accionamiento sobre la primera distancia origina el movimiento axial del vástago del yunque con respecto al miembro de accionamiento en una segunda distancia, de manera que la longitud del movimiento del conjunto de yunque con respecto al conjunto de vaina es mayor que la primera distancia. 2. Un dispositivo grapador quirúrgico según la reivindicación 1, en el que el mecanismo de extensión incluye un vástago alargado (242) de accionamiento que tiene un extremo proximal fijamente conectado al mando (222) de aproximación, y un extremo distal fijado giratoriamente al extensor tubular (246), de forma que la rotación del mando de aproximación origina la rotación del vástago de accionamiento y la rotación del extensor tubular. 3. Un dispositivo grapador quirúrgico según la reivindicación 2, en el que el extremo distal del extensor tubular está operativamente conectado al vástago del yunque. 4. Un dispositivo grapador quirúrgico según la reivindicación 3, en el que el miembro (238) de accionamiento incluye un ánima longitudinal (239) y el vástago de accionamiento se extiende a través del ánima longitudinal. 5. Un dispositivo grapador quirúrgico según la reivindicación 4, en el que el miembro de accionamiento incluye una extensión distal (240) que tiene una hendidura helicoidal (258) formada a su alrededor y el extensor tubular incluye un miembro (276) de leva situado de manera que es recibido dentro de la hendidura helicoidal, donde el accionamiento del mando de aproximación origina la rotación del vástago de accionamiento y la rotación del extensor tubular, y la rotación del extensor tubular alrededor de la extensión distal del miembro de accionamiento origina el movimiento del miembro de leva dentro de la hendidura helicoidal para originar el movimiento axial del miembro tubular con respecto al miembro de accionamiento, en una segunda distancia. 6. Un dispositivo grapador quirúrgico según la reivindicación 5, en el que el extremo distal del extensor tubular está giratoriamente conectado al extremo proximal (248a) del vástago (248) del yunque. 7. Un dispositivo grapador quirúrgico según la reivindicación 6, en el que el vástago alargado de accionamiento incluye al menos una superficie plana (242c) y el extensor tubular incluye un tornillo a presión (277) situado de manera que se aplica sobre la al menos una superficie plana, para fijar giratoriamente el extensor tubular al vástago de accionamiento. 8. Un dispositivo grapador quirúrgico según la reivindicación 1, en el que el mecanismo de extensión incluye un manguito (444) de extensión que tiene un miembro (460) de leva soportado en él, y un extensor (446) unido fijamente al extremo proximal (448a) del vástago (448) del yunque, donde el manguito de extensión traduce el movimiento axial del tornillo (438) de accionamiento en un movimiento axial del manguito de extensión. 9. Un dispositivo grapador quirúrgico según la reivindicación 8, que incluye además una extensión (440) del miembro de accionamiento, acoplada giratoriamente al extremo distal del miembro de accionamiento, estando el extremo distal de la extensión del miembro de accionamiento fijamente unido al manguito de extensión. 10. Un dispositivo grapador quirúrgico según la reivindicación 9, en el que la extensión del miembro de accionamiento incluye una primera hendidura helicoidal (458) formada a su alrededor, estando dimensionada la primera hendidura helicoidal para recibir un pasador (476) que está fijamente unido al dispositivo grapador, de forma que el movimiento axial de la extensión del miembro de accionamiento con respecto al pasador origina la rotación de la extensión del miembro de accionamiento y del manguito de extensión, con respecto al miembro de accionamiento. 11. Un dispositivo grapador quirúrgico según la reivindicación 10, en el que el extensor incluye una segunda hendidura helicoidal (483) formada a su alrededor, estando dimensionada la segunda hendidura helicoidal para recibir 14 ES 2 335 591 T3 el miembro de leva soportado en el manguito de extensión, de forma tal que la rotación del manguito de extensión con respecto al extensor origina el movimiento axial del extensor y del vástago del yunque, con respecto al miembro de accionamiento, en una segunda distancia. 12. Un dispositivo grapador quirúrgico según cualquiera de las reivindicaciones precedentes, que comprende además un conjunto tensor (34) del tejido, que incluye un miembro de enganche del tejido, estando situado el miembro (132) de enganche del tejido entre el conjunto de yunque y el conjunto de vaina, y pudiendo desplazarse con respecto al conjunto de yunque y con respecto al conjunto de vaina. 13. Un dispositivo grapador quirúrgico según la reivindicación 12, en el que el conjunto tensor del tejido incluye un cuerpo hueco (130) que tiene un miembro (136, 138) de enclavamiento situado para enganchar, de manera liberable, con una parte de cremallera del conjunto de yunque. ES 2 335 591 T3 16 ES 2 335 591 T3 17 ES 2 335 591 T3 18 ES 2 335 591 T3 19 ES 2 335 591 T3 ES 2 335 591 T3 21 ES 2 335 591 T3 22 ES 2 335 591 T3 23 ES 2 335 591 T3 24 ES 2 335 591 T3 ES 2 335 591 T3 26 ES 2 335 591 T3 27 ES 2 335 591 T3 28 ES 2 335 591 T3 29 ES 2 335 591 T3 ES 2 335 591 T3 31 ES 2 335 591 T3 32 ES 2 335 591 T3 33 ES 2 335 591 T3 34 ES 2 335 591 T3 ES 2 335 591 T3 36 ES 2 335 591 T3 37 ES 2 335 591 T3 38 ES 2 335 591 T3 39 ES 2 335 591 T3 ES 2 335 591 T3 41 ES 2 335 591 T3 42 ES 2 335 591 T3 43 ES 2 335 591 T3 44 ES 2 335 591 T3 ES 2 335 591 T3 46
Patentes similares o relacionadas:
Grapadora circular y componente de grapa de la misma, del 3 de Junio de 2020, de Touchstone International Medical Science Co., Ltd: Un conjunto de cabezal de grapas que comprende:
un cartucho anular de grapas que comprende una pluralidad de agujeros de grapas en una cara de extremo del […]
Aparato de grapado quirúrgico, que incluye un aditamento de refuerzo, del 13 de Mayo de 2020, de Covidien LP (100.0%): Un aparato para unir dos secciones de órganos huecos con una matriz anular de grapas quirúrgicas, el aparato que comprende:
un componente de cartucho de […]
Unión de refuerzo para un dispositivo de grapado circular, del 1 de Abril de 2020, de Covidien LP (100.0%): Un dispositivo de grapado circular , que comprende:
un conjunto de empuñadura ;
un cuerpo alargado que se extiende desde el conjunto de empuñadura ;
[…]
Banda de bloqueo de la unidad de carga para un instrumento de grapado quirúrgico, del 1 de Abril de 2020, de Covidien LP (100.0%): Una unidad de carga que comprende:
un conjunto de carcasa que tiene un cuerpo anular que se extiende proximalmente , el cuerpo anular que […]
Dispositivo de grapado con portacuchillas liberable, del 1 de Enero de 2020, de Covidien LP (100.0%): Un dispositivo de grapado quirurgico que comprende:
un cuerpo alargado que define un eje longitudinal y que tiene una porcion proximal y una porcion distal, […]
Instrumento quirúrgico con mecanismo de seguridad, del 1 de Enero de 2020, de Covidien LP (100.0%): Un instrumento de grapado quirúrgico , que comprende:
un conjunto del mango que incluye un mango estacionario , un mecanismo de aproximación y un gatillo […]
Contrafuerte grapador anastomótico de refuerzo, del 27 de Noviembre de 2019, de ETHICON, INC.: Una grapadora circular para unir anastomóticamente secciones de tejido tubular, que comprende:
a. Un yunque circular ;
b. Una cabeza grapadora […]
Dispositivos para suministrar grapas de memoria de forma, del 27 de Noviembre de 2019, de Endogene Limited: Un dispositivo para el suministro de grapas de memoria de forma , en donde el dispositivo comprende:
una porción de asimiento […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .