Aparato de agarre por vacío.
Un dispositivo asidor (130) que tiene una campana de agarre flexible (180),
la cual incluye una base y una pluralidad de pasos o canales, caracterizado por que:
la base esta formada en torno a un primer orificio central (194) y tiene un contorno o circunferencia predeterminada, rodeada por un labio flexible (190) que se extiende en torno a la circunferencia de la base y se extiende hacia abajo hasta un reborde circunferencial (220), de tal modo que la pluralidad de canales (204) pasan radialmente hacia fuera desde el primer orificio central (194) y hacia abajo por el labio (190) hasta llegar a una distancia predeterminada desde el reborde (220), de tal manera que el labio (190) y el reborde (220) son adaptables para adecuarse o ajustarse a una pieza de trabajo cuando se crea una diferencia de presiones entre la campana y la pieza de trabajo;
una base (182) de labio, montada en la base de la campana y que tiene un segundo orificio central (194);
una linea o conducción de vacio, que pasa a traves de los primer y segundo orificios centrales; y una pluralidad de dedos (200) de paso o canal, cada uno de los cuales tiene un extremo proximal y un extremo distal, de manera que cada dedo (200) esta fijado a la campana de agarre (180) mediante su montaje dentro de uno respectivo de los canales (204);
por lo que, al ser aplicado, se aplica inicialmente una fuerza de vacio a traves del primer orificio (194), que hace que ciertas partes de la pieza de trabajo se desplacen hacia el primer orificio (194), tras lo cual la fuerza de vacio es dirigida a lo largo de los dedos (200), con lo que se hace posible un agarre por succión en una pluralidad de puntos próximos al reborde (220) de la campana de agarre (180), y se provoca que la campana (180) se deforme en torno a una superficie de una pieza de trabajo y se adapte a esta.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2008/005330.
Solicitante: Adept Technology Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5960 Inglewood Drive Pleasanton, CA 94588 ESTADOS UNIDOS DE AMERICA.
Inventor/es: HJORNET,Preben K.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25B11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25B HERRAMIENTAS O UTILLAJE DE BANCO NO PREVISTOS EN OTRO LUGAR, PARA FIJAR, UNIR, DESENGANCHAR O MANTENER. › Portapiezas o dispositivos de posicionar no cubiertos por los grupos B25B 1/00 - B25B 9/00, p. ej. portapiezas magnéticos, portapiezas que utilizan el vacío (para mantener o posicionar las piezas a soldar, soldar sin fusión o cortar por calentamiento localizado B23K 37/04; especialmente adaptados a las máquinas-herramientas B23Q 3/00).
- B25J15/06 B25 […] › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › con medios de retención magnéticos o que funcionan por succión.
PDF original: ES-2383718_T3.pdf
Fragmento de la descripción:
Aparato de agarre por vacio.
ANTECEDENTES
Esta invención se refiere al campo del asimiento de piezas de trabajo irregulares y deformables con el fin de elevar y sostener las piezas de trabajo, ya esten empaquetadas, procesadas o tratadas, o en bruto, y manipular las piezas de trabajo para el propósito del manejo, ensamblaje, empaquetamiento o envasado de material y otras funciones de manipulación robóticas y automatizadas.
La ISO [Organización Internacional de Normalización -"International Standardization Organization"] define los robots industriales como dispositivos manipuladores para multiples propósitos, automaticamente controlados y reprogramables, susceptibles de programarse en tres o mas ejes. Aunque el control del movimiento de los robots industriales ha alcanzado un alto nivel de sofisticación y flexibilidad, las dificultades relativas al elemento mas critico de un sistema robótico, el dispositivo de accionamiento final, o instrumental terminal del brazo, han impedido la adopción de autómatas o robots industriales en muchos segmentos de la industria.
Los dispositivos de accionamiento finales comunes incluyen dispositivos de soldadura, rociadores de pintura, esmeriladoras o rectificadoras y dispositivos de desbarbado, asi como mordazas. Los dispositivos de accionamiento finales y, en particular, los tipos de asimiento son, con frecuencia, altamente complejos y altamente particularizados o especializados para ajustarse a la pieza de trabajo que es manejada. Los dispositivos de accionamiento finales pueden servirse de diversos sensores para ayudar al sistema robótico a localizar, manejar y colocar los productos. Sin embargo, la tecnologia se ha quedado atras en este campo debido a las dificultades inherentes al manejo de objetos irregulares y a la fabricación de dispositivos de agarre adecuados para una variedad suficientemente amplia de usos, a fin de generar las economias de escala requeridas para su adopción comercial generalizada.
Muchas soluciones han venido disponiendo, asimismo, de programación o software inadecuado, lo que conducia a efectos colaterales imprevistos a la hora de tratar de manipular productos naturales. El software de visión artificial, un componente importante para una implementación robótica industrial satisfactoria, se ve, a menudo, limitado por la iluminación inadecuada o irregular que se da en entornos industriales reales. De esta forma, persiste la necesidad de un mejor aparato de agarre.
El documento DE 4.129.289 divulga un dispositivo asidor de acuerdo con la parte de preambulo de la reivindicación 1.
DESCRIPCION DE LA INVENCION
De acuerdo con la presente invención, se proporciona un dispositivo asidor segun se define en las reivindicaciones independientes que se acompafan.
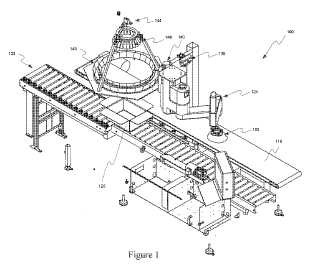
El aparato divulgado puede asir, elevar, sostener, empaquetar y mover piezas de trabajo irregulares y deformables, tales como vegetales, fruta, carne de cerdo, aves de corral y carne vacuna, o articulos no alimenticios, ya sean procesados o en bruto: El aparato es capaz de manipular bolsas para el propósito del manejo, ensamblaje, empaquetamiento o envasado de material y otras funciones de manipulación robóticas y automatizadas. El aparato puede tambien agarrar objetos envueltos o irregularmente formados, con o sin envoltorios permeables al aire u orificios de ventilación en la superficie externa, garantizando un rozamiento y fuerzas de sujeción suficientes para soportar las fuerzas de aceleración extremas que resultan de un manejo robótico a alta velocidad.
El aparato comprende un dispositivo de agarre por vacio susceptible de ser manipulado por un brazo de robot, asi como un sistema óptico destinado a proporcionar información de la colocación del dispositivo de agarre. El dispositivo asidor facilita un agarre seguro y firme, pero suave, que permite el manejo de una amplia variedad de piezas de trabajo de diversos tamafos y formas, asi como su desplazamiento con rapidas aceleraciones verticales y horizontales para operaciones reales de empaquetamiento eficientes.
Mediante una acción adaptativa, el aparato distribuye la fuerza del dispositivo de asimiento uniformemente sobre la 45 maxima area de los productos encapsulados. El aparato incorpora un metodo para supervisar el funcionamiento de las herramientas de manejo por vacio in situ. El aparato tambien facilita capacidades de manejo de productos automaticas para productos embolsados, con independencia de si el envase o pieza de trabajo se ha llenado totalmente o solo parcialmente.
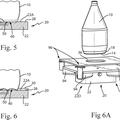
El dispositivo de agarre tiene una campana flexible montada en una placa de base. La campana incluye una 50 membrana y un labio circunferencial. La membrana de agarre esta hecha de un material blando, tal como silicona o una mezcla termoplastica blanda, que le permite adaptarse a la superficie irregular de la pieza de trabajo de manera tal, que se generara una diferencia en la presión del aire entre la superficie de la pieza de trabajo y el labio del dispositivo asidor. La campana puede haberse moldeado por un procedimiento de moldeo secuencial termoplastico en el que el labio de la campana se moldea de un polimero con una temperatura de fusión mas alta que la del 55 polimero de la membrana. A menudo, es este un metodo eficiente en cuanto a costes y que proporciona una buena
unión entre el labio-membrana y la base. Unos tubos pequefos y flexibles (dedos de paso de vacio) se han formado a traves de unos canales existentes en la campana de agarre flexible.
La placa de base tiene un gran orificio central para dar acomodo a una linea o conducción de vacio. La succión se genera en un orificio central situado en la parte superior de la campana, asi como a traves de tubos flexibles o dedos que se extienden a lo largo de la pared de la campana hasta unos extremos abiertos, que proporcionan fuerza de agarre en multiples puntos mas cercanos al borde de la campana. En aplicaciones relacionadas con la alimentación, estos tubos pueden ser retirados tras el moldeo, dejando el paso o canal abierto, pero suficientemente rigidos para no aplastarse cuando se genera un elevado grado de vacio. Esto reduce el riesgo de desprendimiento o exfoliación entre el tubo y la membrana y la posibilidad concomitante de que caiga un objeto extrafo dentro de la pieza de trabajo o el envase.
Se introduce inicialmente un flujo de aire en torno al reborde de la placa de base. No hay ningun flujo de aire hasta que el labio se coloca sobre la pieza de trabajo. Con un vacio de aproximadamente el 80%, puede crearse un grado suficiente de vacio en aproximadamente 1/10 de segundo. Esto crea un repentino choque en la pieza de trabajo y en el labio del dispositivo asidor. Dentro de aproximadamente 5/100 de segundo, la pieza de trabajo es atrapada contra el reborde de la placa de base. En ese momento, el flujo de aire en torno a la placa de base se bloquea y el unico flujo de aire es el que desciende por los tubos flexibles. Esto provoca que el labio del dispositivo asidor, al estar hecho de un material flexible, se deforme hasta adoptar la forma de la pieza de trabajo, formando una conexión o unión fuerte en multiples lugares de la pieza de trabajo.
En el momento en que se han cerrado los pequefos intersticios existentes entre la superficie de la pieza de trabajo y la superficie de fijación de la membrana del dispositivo asidor, ya no hay, por lo comun, necesidad de un elevado flujo de aire y es posible mantener, tipicamente, un vacio reducido, de entre el 20 y el 40 por ciento. En ausencia de baja presión en torno al reborde del labio, al ser sometida a un movimiento rapido la pieza de trabajo por parte del aparato robótico, la pieza de trabajo se liberara del vacio. La gran area existente en el dispositivo asidor, que comprende el orificio central y los tubos perifericos, funciona como un conjunto normal de copas o ventosas de succión. En la mayoria de los casos, la pieza de trabajo esta fuertemente adherida a la campana, con lo que se consigue una capacidad de elevación del orden de 20 a 100 kilogramos para una membrana del dispositivo asidor con un area de reborde de aproximadamente 300 cm2. Esta gran fuerza de agarre facilita una rapida aceleración de la pieza de trabajo por parte del aparato robótico desde la cinta o superficie de trabajo, por lo que se aumenta significativamente la eficiencia global del sistema de manejo de material.
Por lo comun, el dispositivo asidor es capaz de elevar una pieza de trabajo desde una cinta transportadora de material tipica en aproximadamente 8/100 de segundo, a menudo con una tasa o proporción de exito... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo asidor (130) que tiene una campana de agarre flexible (180) , la cual incluye una base y una pluralidad de pasos o canales, caracterizado por que:
la base esta formada en torno a un primer orificio central (194) y tiene un contorno o circunferencia predeterminada, rodeada por un labio flexible (190) que se extiende en torno a la circunferencia de la base y se extiende hacia abajo hasta un reborde circunferencial (220) , de tal modo que la pluralidad de canales (204) pasan radialmente hacia fuera desde el primer orificio central (194) y hacia abajo por el labio (190) hasta llegar a una distancia predeterminada desde el reborde (220) , de tal manera que el labio (190) y el reborde (220) son adaptables para adecuarse o ajustarse a una pieza de trabajo cuando se crea una diferencia de presiones entre la campana y la pieza de trabajo;
una base (182) de labio, montada en la base de la campana y que tiene un segundo orificio central (194) ;
una linea o conducción de vacio, que pasa a traves de los primer y segundo orificios centrales; y una pluralidad de dedos (200) de paso o canal, cada uno de los cuales tiene un extremo proximal y un extremo distal, de manera que cada dedo (200) esta fijado a la campana de agarre (180) mediante su montaje dentro de uno respectivo de los canales (204) ;
por lo que, al ser aplicado, se aplica inicialmente una fuerza de vacio a traves del primer orificio (194) , que hace que ciertas partes de la pieza de trabajo se desplacen hacia el primer orificio (194) , tras lo cual la fuerza de vacio es dirigida a lo largo de los dedos (200) , con lo que se hace posible un agarre por succión en una pluralidad de puntos próximos al reborde (220) de la campana de agarre (180) , y se provoca que la campana (180) se deforme en torno a una superficie de una pieza de trabajo y se adapte a esta.
2. El dispositivo asidor de acuerdo con la reivindicación 1, en el cual la campana (180) se extiende hacia abajo hasta un reborde circunferencial (220) , de acuerdo con una curva generalmente con forma de coseno que produce un perfil de deformación predeterminado.
3. El dispositivo asidor de acuerdo con la reivindicación 1, en el cual cada uno de los canales (204) esta separado de los canales adyacentes por una protuberancia (214) .
4. El dispositivo asidor de acuerdo con la reivindicación 1, en el cual los dedos (200) estan moldeados integralmente o de una pieza dentro de los canales (204) de la campana.
5. El dispositivo asidor de acuerdo con la reivindicación 1, que comprende adicionalmente una placa de fondo (208) conectada o unida a la base (182) del labio y que flota dentro de la circunferencia de la campana.
6. El dispositivo asidor 1 de acuerdo con la reivindicación 1, que comprende adicionalmente un obstaculo formado dentro de la base (182) del labio con el fin de evitar que porciones sueltas de la pieza de trabajo llenen el primer orificio.
7. Un aparato de agarre por vacio que comprende un dispositivo asidor de acuerdo con cualquiera de las reivindicaciones precedentes, un brazo de robot (124) que tiene un punto central (188) para herramienta, al que se conecta o une el dispositivo asidor (130) , y al menos una manguera de vacio en comunicación con los extremos proximales de los dedos (200) a traves de los primer y segundo orificios (194) , y conectada a una fuente de vacio (134) y configurada para proporcionar una fuerza de succión dentro de la campana (180) del dispositivo asidor, en posición próxima al primer orificio central, y para proporcionar una fuerza de succión a traves de la manguera de vacio, hasta los extremos distales, o mas alejados, de los dedos, con lo que se permite el agarre por succión en una pluralidad de puntos próximos al reborde de la campana de agarre.
8. El aparato de acuerdo con la reivindicación 7, que comprende adicionalmente un controlador computerizado de funcionamiento instantaneo o en tiempo real para el brazo de robot (124) , que incorpora realimentación para colocar el dispositivo asidor (130) en posición adyacente a la pieza de trabajo que se va a agarrar.
9. El aparato de acuerdo con la reivindicación 7, que comprende adicionalmente un adaptador basculante (184) , montado entre el brazo de robot (124) y el dispositivo asidor (130) con el fin de permitir la rotación del dispositivo asidor alrededor de un eje predeterminado sin que rote la manguera de vacio.
10. El aparato de acuerdo con la reivindicación 7, que comprende adicionalmente un sensor para supervisar la fuerza de vacio y para responder si las fuerzas de sustentación caen por debajo de una magnitud predeterminada.
11. El aparato de acuerdo con la reivindicación 7, que comprende adicionalmente una valvula (138) para controlar la magnitud de la fuerza de vacio dentro de la manguera de vacio.
12. El aparato de acuerdo con la reivindicación 7, que comprende adicionalmente un sistema óptico que comprende:
una fuente de luz (146) para iluminar la pieza de trabajo;
al menos un anillo segmentado de espejos (148) para reflejar la luz procedente de la fuente de luz y para iluminar la pieza de trabajo; y una camara (144) , que tiene una lente de objetivo para grabar información de imagen predeterminada de la pieza de trabajo.
13. El aparato de acuerdo con la reivindicación 12, en el cual los espejos (148) forman un conjunto geometricamente ordenado y estatico de espejos concentricos.
14. El aparato de acuerdo con la reivindicación 12, en el cual la luz es reflejada por los espejos (148) para que incida en la pieza de trabajo con un angulo agudo, a fin de evitar reflexiones y maximizar el contraste.
15. El aparato de acuerdo con la reivindicación 12, en el cual la fuente de luz (146) ilumina la pieza de trabajo para permitir a la camara (144) tomar una imagen de la pieza de trabajo, despues de lo cual son extraidas de la imagen caracteristicas o rasgos geometricos de la pieza de trabajo y comparadas con un modelo geometrico predefinido que tiene caracteristicas similares y una posición de agarre descentrada predeterminada, por lo que el brazo de robot
(124) es orientado generalmente para alinear el dispositivo asidor (130) con respecto a la posición descentrada predeterminada.
16. El aparato de acuerdo con la reivindicación 7 y apto para asir y soltar objetos irregulares, de tal manera que la campana del dispositivo asidor es una campana de agarre unitaria y flexible (180) que incluye la base formada en torno a un primer orificio central (194) y que tiene una circunferencia o contorno de una forma predeterminada rodeada por el labio (190) , que se extiende en torno a la circunferencia de la base y se extiende hacia abajo hasta un reborde circunferencial (220) , de acuerdo con una curva generalmente con forma de coseno que produce un perfil de deformación predeterminado, de tal manera que la pluralidad de canales (204) estan formados dentro de la campana, siendo el labio lo suficientemente flexible como para que el labio y el reborde sean adaptables para ajustarse a una pieza de trabajo de forma irregular cuando se crea una diferencia de presiones entre la campana y la pieza de trabajo, de tal manera que cada uno de los canales se encuentra separado de los canales adyacentes por una protuberancia (214) ;
la pluralidad de dedos de canal son dedos de canal de vacio tubulares, flexibles y huecos (200) ;
el brazo de robot (124) es controlable por un controlador computerizado de funcionamiento instantaneo o en tiempo real, que incorpora realimentación tactil y visual para colocar el dispositivo asidor en posición adyacente a la pieza de trabajo que se va a agarrar;
la al menos una manguera de vacio tiene unos primer y segundo extremos, de tal forma que el primer extremo esta en comunicación con los extremos proximales, o mas cercanos, de los dedos a traves de los primer y segundo orificios, estando el segundo extremo conectado a la fuente de vacio (134) , por lo que, al aplicarse inicialmente una succión, la mayor parte de la fuerza de vacio es aplicada a traves del primer orificio, lo que provoca que las porciones de la pieza de trabajo se desplacen hacia el primer orificio, con lo cual la fuerza de vacio es dirigida a traves de los dedos:
el aparato comprende, adicionalmente, una valvula de flujo accionada electrónicamente, de alta velocidad y elevado vacio (138) , para controlar el grado de succión dentro de la manguera de vacio;
un sistema óptico para proporcionar información de la posición del brazo de robot, de tal manera que el sistema óptico comprende:
una pluralidad de diodos electroluminiscentes para iluminar la pieza de trabajo;
una pluralidad de anillos segmentados de espejos (148) que reflejan la luz procedente de los diodos electroluminiscentes con el fin de proporcionar una iluminación homogenea de la pieza de trabajo;
una camara (144) que tiene una lente de objetivo para grabar información de imagen predeterminada de la pieza de trabajo;
memoria para almacenar las imagenes captadas por la camara;
de tal modo que los diodos electroluminiscentes iluminan la pieza de trabajo por medio de los espejos con el fin de permitir que la camara tome una imagen de la pieza de trabajo, tras lo cual se extraen de la imagen rasgos o caracteristicas geometricas de la pieza de trabajo irregular, y se comparan con un modelo geometrico predefinido que tiene caracteristicas similares y una posición de agarre descentrada predeterminada, por lo que el brazo de robot se orienta generalmente para alinear el dispositivo asidor con respecto a la posición descentrada predeterminada; y un sensor para indicar al controlador que se ha conseguido una fuerza de sustentación segura por medio de la fuerza de succión y, ademas, para supervisar la fuerza de sustentación y para responder si la fuerza de sustentación cae por debajo de una magnitud predeterminada.
Patentes similares o relacionadas:
 Soporte de vacío con junta de falda extensible, del 29 de Julio de 2020, de THE PROCTER & GAMBLE COMPANY: Un soporte de vacío que tiene una superficie de retención para soportar un artículo contra dicha superficie de retención mediante vacío, […]
Soporte de vacío con junta de falda extensible, del 29 de Julio de 2020, de THE PROCTER & GAMBLE COMPANY: Un soporte de vacío que tiene una superficie de retención para soportar un artículo contra dicha superficie de retención mediante vacío, […]
Dispositivo de mantenimiento para una estación de trabajo de una máquina de conformado, del 15 de Julio de 2020, de BOBST MEX SA: Máquina de conformado que comprende una estación de trabajo que incluye un dispositivo de mantenimiento de un elemento en forma […]
Dispositivo de ajuste del travesaño, travesaño y método de fabricación de una pala del rotor para una planta de energía eólica, del 8 de Abril de 2020, de Senvion Deutschland GmbH: Estructura para alinear un travesaño para una pala del rotor de una planta de energía eólica y un dispositivo de ajuste del travesaño para el travesaño […]
Dispositivo auxiliar de chapistería, del 23 de Marzo de 2020, de GALINDO HUERTA, David: 1. Dispositivo auxiliar de chapistería, para asegurar la posición relativa de los signos que forman una indicación a posicionar sobre la chapa o cualquier elemento del […]
Aparato y método de instalación de parabrisas, del 12 de Febrero de 2020, de Belron International Limited: Aparato para su uso en el manejo de parabrisas para su instalación en un vehículo, comprendiendo el aparato: un conjunto de ancla de parabrisas […]
Mesa de vacío para máquinas de corte, del 20 de Enero de 2020, de OPEN MIND VENTURES, S.L.U: La mesa de vacío para máquinas de corte comprende una superficie de corte formada por una pluralidad de cepillos , estando dichos […]
DISPOSITIVO Y PROCEDIMIENTO DE SUJECIÓN PARA SUJETAR PIEZAS DE MATERIAL NO FÉRRICO, del 9 de Enero de 2020, de CARRERO RODRIGUEZ, Oscar: Dispositivo y procedimiento de sujeción para sujetar piezas de material no férrico, que comprende, una cámara estanca a gases que comprende […]
Ventosa con faldón separable, del 4 de Diciembre de 2019, de VTEC Co. Ltd: Ventosa con faldón separable que comprende: un cuerpo hueco (11, 31, 41 o 51) que tiene un conducto formado verticalmente a través de él, una protuberancia anular […]