CIP-2021 : G05B 19/18 : Control numérico (NC), es decir, máquinas que funcionan automáticamente,
en particular máquinas herramientas, p. ej. en un entorno de fabricación industrial, para efectuar un posicionamiento, un movimiento o acciones coordinadas por medio de datos de un programa en forma numérica (G05B 19/418 tiene prioridad).
CIP-2021 › G › G05 › G05B › G05B 19/00 › G05B 19/18[2] › Control numérico (NC), es decir, máquinas que funcionan automáticamente, en particular máquinas herramientas, p. ej. en un entorno de fabricación industrial, para efectuar un posicionamiento, un movimiento o acciones coordinadas por medio de datos de un programa en forma numérica (G05B 19/418 tiene prioridad).
G FISICA.
G05 CONTROL; REGULACION.
G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K).
G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00).
G05B 19/18 · · Control numérico (NC), es decir, máquinas que funcionan automáticamente, en particular máquinas herramientas, p. ej. en un entorno de fabricación industrial, para efectuar un posicionamiento, un movimiento o acciones coordinadas por medio de datos de un programa en forma numérica (G05B 19/418 tiene prioridad).
CIP2021: Invenciones publicadas en esta sección.
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios.
(01/07/2020) Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo el robot móvil :
a) un base del robot , que comprende
(i) un mapa que define un plano de planta para el entorno físico, un conjunto de ubicaciones de trabajo con respecto al plano de planta , y que asocian un conjunto de operaciones de trabajo con dos o más ubicaciones de trabajo en el conjunto de ubicaciones de trabajo;
caracterizado por que la base del robot comprende además
(ii) un controlador de la base del robot que recibe la asignación de trabajo, incluyendo…
Dispositivo limitador de arranque y máquina herramienta.
(09/10/2019) Dispositivo limitador de arranque que comprende:
una unidad de prohibición de arranque configurada para prohibir el arranque de un equipo cuando se detecta la reubicación del mismo,
una unidad de cancelación de prohibición de arranque configurada para cancelar la prohibición del arranque del equipo por parte de la unidad de prohibición de arranque, y
una unidad de recepción de orden configurada para recibir una orden predeterminada,
en el que el dispositivo limitador de arranque prohíbe el arranque del equipo mediante la unidad de prohibición de arranque, de modo que la unidad de cancelación de prohibición de arranque pueda cancelar la prohibición de arranque del equipo cuando la unidad de…
Robot oruga y plataforma de soporte.
(15/05/2019) Aparato que comprende un sistema de oruga y un robot oruga, comprendiendo el robot oruga:
un primer sistema de movimiento configurado para mover el robot oruga y el sistema de oruga a lo largo de una superficie no plana, donde el sistema de oruga es un sistema de oruga flexible configurado para doblarse para adaptarse sustancialmente a un contorno de la superficie no plana; y
un segundo sistema de movimiento configurado para mover el robot oruga a lo largo del sistema de oruga flexible en la superficie 230, en el que:
el primer sistema de movimiento puede moverse entre un estado 215 extendido y un estado retraído; cuando el primer sistema de movimiento está en estado extendido, el sistema de oruga flexible no puede extenderse…
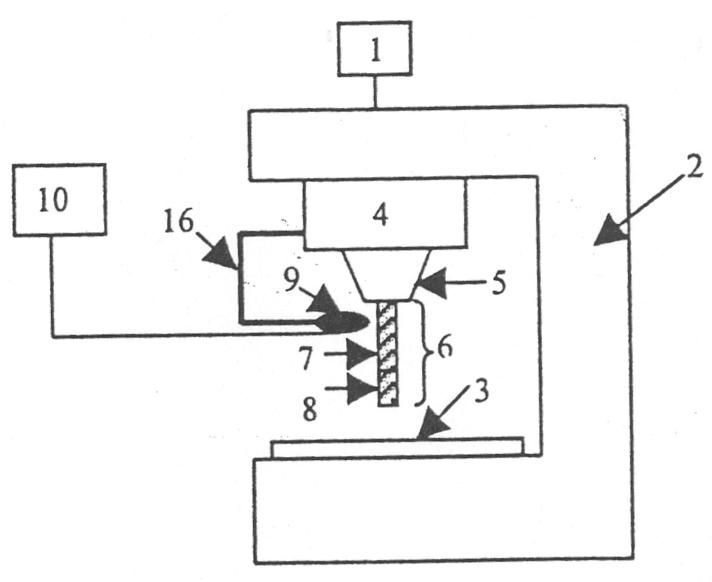
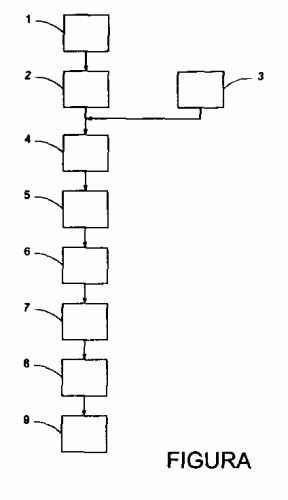
Dispositivo de presión giratorio que permite un control eléctrico y método de control para el mismo.
(17/04/2019) Un dispositivo de presión giratorio controlable eléctricamente, que comprende:
un medio de presión giratorio para ser introducido en una estructura para perforar un orificio en la misma o para ser fijado a la misma;
un motor para generar una par de torsión que se provee al medio de presión giratorio;
una unidad de control de potencia para suministrar potencia al motor ;
una unidad central de procesamiento para controlar la unidad de control de potencia;
un sensor de velocidad de rotación para medir la velocidad de rotación del motor o del medio de presión giratorio;
un sensor de corriente para medir una corriente que fluye hacia el motor ; y
una unidad de compensación…
Procedimiento y dispositivo para la generación de datos de control para la configuración de un flanco dentado a través de mecanización fresada de una pieza de trabajo en una máquina herramienta.
(07/02/2019) Procedimiento para la generación de datos de control para la configuración de un flanco dentado a través de mecanización fresada de una pieza de trabajo en una máquina herramienta de control numérico, que comprende al menos 5 ejes, en particular en una máquina herramienta Universal, a través de la pasada sucesiva de trayectorias de mecanización con una herramienta fresadora de una máquina herramienta sobre la base de datos de control generados, con las etapas:
- especificación de una geometría de los flancos de los dientes
- fijación de una zona de patrones de contacto sobre la geometría específica…
Dispositivo de orientación para vehículos de transporte accionados eléctricamente y guiados automáticamente en naves industriales.
(04/02/2019). Solicitante/s: GRENZEBACH MASCHINENBAU GMBH. Inventor/es: BAIER, GUNAR, DEUTSCHER,REINER.
Dispositivo de orientación para vehículos de transporte accionados eléctricamente y guiados automáticamente en naves industriales, especialmente los así llamados AGV (automatic guided vehicles), con un escáner láser y con un sensor de campo luminoso caracterizado por
a) una cámara para la identificación de puntos de apoyo de una planificación de ruta por medio de marcadores de posición , configurándose los marcadores de posición como soportes de código de matriz de datos formados a partir de una disposición de nueve códigos de matriz de datos dispuestos en un cuadrado y situándose las diagonales de 3 códigos individuales en una línea recta, y por
b) un sensor ultrasónico delantero y un sensor ultrasónico trasero.
PDF original: ES-2698381_T3.pdf
Procedimiento de ajuste del consumo de energía de dos herramientas durante el mecanizado de extremos de secciones de tubo.
(16/01/2019) Procedimiento de mecanizado de una sección de perfil largo que tiene una longitud real (L1) y un primer y un segundo extremo (3, 3'), donde el primer y el segundo extremo (3, 3') se mecanizan con un primer o un segundo cabezal de herramienta y, durante un tiempo de mecanizado, el material es eliminado continuamente por el primer y segundo cabezal de herramienta giratorio , caracterizado porque el tiempo de mecanizado (t) se divide en incrementos de tiempo (Δti), donde para cada incremento de tiempo (Δti) se mide un par de torsión (M (ti), M'(ti)) del cabezal de herramienta y donde por cada incremento…
MÁQUINA PARA EL MECANIZADO POR CONTROL NUMÉRICO DE PANELES DE MADERA, PLÁSTICO Y MATERIALES SIMILARES, DEL TIPO QUE ES SUSCEPTIBLE DE USAR UN SISTEMA DE TRABAJO ¿NESTING¿.
(28/09/2017) 1. Máquina para el mecanizado por control numérico de paneles de madera, plástico y materiales similares, del tipo que es susceptible de usar un sistema de trabajo "Nesting", que comprende una mesa para situar al menos uno de dichos paneles , definiendo por lo menos una porción de la superficie de dicha mesa una primera área útil (A) de trabajo provista de medios para fijar la posición de al menos un panel , caracterizada por el hecho de que comprende, además, una pluralidad de barras montadas desplazables sobre el área útil (A) de trabajo de la mesa para el apoyo de al menos uno de dichos paneles , definiendo dicha pluralidad…
Máquina herramienta y procedimiento de medición de una pieza de trabajo.
(25/05/2016) Máquina herramienta, en particular rectificadora, comprendiendo los elementos siguientes:
- un alojamiento de pieza de trabajo que comprende al menos un portapiezas destinado para recibir una pieza de trabajo ,
- una unidad de herramienta que comprende un husillo de herramienta , comprendiendo en particular un cabezal rectificador, destinada para recibir y para accionar una herramienta , en particular al menos una muela abrasiva, en la cual la unidad de herramienta puede ser desplazada con respecto a la pieza de trabajo por lo menos a lo largo de un eje de alimentación , - un dispositivo de medición que está montado en la unidad de herramienta , presentando el dispositivo de
medición por lo menos un palpador de medición , y
- un dispositivo de control que está conectado con el dispositivo de medición y con…
Dispositivo de control numérico.
(06/04/2016) Un dispositivo de control numérico mediante el cual se realiza el mecanizado en un objeto de mecanizado mientras se mueve una herramienta y el objeto de mecanizado relativo a cada uno por dos o más ejes de control proporcionados en al menos una entre la herramienta y el objeto de mecanizado, comprendiendo el dispositivo de control numérico:
una unidad de procesamiento de análisis que obtiene un comando de movimiento para mover en un camino de movimiento curvado en un programa de mecanizado, y condiciones de vibración para vibrar a lo largo del camino de movimiento curvado;
una unidad de cálculo de cantidad de movimiento de comando que calcula una cantidad (ΔL) de movimiento de comando que es una cantidad de movimiento…
Aparato de procesamiento de piezas y método de procesamiento de piezas.
(26/11/2015) Un aparato de mecanizado de piezas provisto de un husillo principal movible , que puede moverse hacia delante y hacia atrás entre una posición de suministro de piezas (I) y una posición de salida de piezas (III), en el que puede suministrarse una pieza (W) al husillo principal movible en la posición de suministro (I), el husillo principal movible puede moverse desde la posición de suministro (I) a la posición de salida (III), y la pieza puede sacarse del husillo principal movible en la posición de salida (III), con lo que la pieza (W) puede transferirse desde la posición de suministro (I) a la posición de salida (III), en donde
un portaherramientas está acoplado de manera móvil al husillo principal movible; y
el portaherramientas está configurado de tal manera que puede procesar…
Máquina y método para mecanizar cigüeñales de grandes dimensiones.
(08/07/2015) Máquina y método para mecanizar cigüeñales de grandes dimensiones, que permite sincronizar de manera sencilla y fiable un movimiento de giro de dicho cigüeñal en todos sus puntos, donde dicha máquina comprende un útil de mecanizado configurado para desplazarse a lo largo de al menos una guía entre un primer apoyo extremo y un segundo apoyo extremo , comprendiendo un primer detector electrónico de posición angular situado en unprimer eje de giro de dicho primer apoyo extremo , comprendiendo asimismo un segundo detector electrónico de posición angular situado en un segundo eje de giro de dicho segundo apoyo extremo , de forma que el…
Sistema y procedimiento de monitorización.
(08/07/2015) Un sistema para monitorizar una zona (A) próxima a una máquina de procesamiento (M), teniendo la máquina (M) por lo menos un cabezal operativo móvil en la zona (A) o próximo a la misma, que comprende una primera pareja (C1) de cámaras de video (T1, T2) situadas, en uso, en una posición recíproca predeterminada para adquirir imágenes tridimensionales de la zona (A), caracterizado porque el sistema comprende, además, en combinación:
- una segunda pareja (C2) de cámaras de video (T3, T4), situadas, en uso, en una posición recíproca predeterminada para tomar imágenes tridimensionales de la zona (A) desde un ángulo distinto con relación a la primera pareja (C1) de cámaras de video (T2, T3);
- medios de procesamiento…
Sistema y procedimiento de comprobación y alineación de herramienta.
(22/04/2015) Un procedimiento para mejorar una trayectoria de la punta de una herramienta de una máquina multieje, en el que el procedimiento comprende:
la secuenciación de una herramienta de la máquina multieje a través de una primera secuencia de posiciones y orientaciones con relación a un marco de referencia base;
la recepción de información indicativa de la posición y la orientación de un sensor con respecto al marco de referencia base;
caracterizado por la secuenciación de la herramienta de la máquina multieje a través de una segunda secuencia de posiciones y orientaciones con relación a la posición y orientación del sensor ;
la detección de una ubicación de la herramienta en cada posición y orientación de la segunda secuencia de posiciones y orientaciones con el sensor para obtener información…
Corrección de herramientas.
(11/06/2014) Procedimiento para un sistema de una máquina herramienta destinado a corregir por lo menos una herramienta ,
comprendiendo el procedimiento:
* la creación de una ilustración gráfica de la pieza en la que se presentan las dimensiones de la pieza;
* la creación de relaciones entre las distintas zonas de dicha ilustración gráfica y las herramientas correspondientes en el sistema, proponiendo relaciones entre las herramientas y las medidas que se encuentran en un programa de mecanizado;
* la recepción de una selección de una medida de la pieza, realizándose la selección a partir de la ilustración gráfica;
* la recepción de una indicación de la corrección de por lo menos un valor relacionado con dicha medida seleccionada; y *…
Máquina herramienta y procedimiento para la mecanización de una pieza de trabajo.
(09/04/2014) Máquina herramienta para la mecanización de una pieza de trabajo por medio de una o varias herramientas controladas con la ayuda de datos de control a través de mecanización por arranque de virutas, en la que la máquina herramienta (1009 comprende al menos ejes que pueden ser activados de forma simultánea, con un medio de empotramiento para el empotramiento de la pieza de trabajo y con un dispositivo de control con una pieza de alojamiento para el alojamiento de una o varias herramientas , en la que el dispositivo de control es adecuado para controlar la herramienta recibida en el medio de alojamiento con la ayuda de los datos de control a lo largo de una trayectoria…
Dispositivo para controlar una máquina así como sistema de telecomunicaciones.
(12/03/2013) Dispositivo para controlar una máquina herramienta con un control de máquina en forma de un ordenador de control, en el que se opera un software de gestión de máquina, caracterizado,
porque el control de máquina presenta un primer ordenador (10a) virtual y un segundo ordenador (10b) virtual,porque el primer ordenador (10a) virtual se opera con un primer sistema operativo y el segundo ordenador (10b)virtual con un segundo sistema operativo,
porque en el primer ordenador virtual (10a) está instalada una conexión a Internet, y
porque en el segundo ordenador (10b) virtual está instalado un software de gestión de máquina.
Método de control para máquinas, que incluye un sistema, programa de ordenador, señales de datos e interfaz gráfica de usuario.
(27/03/2012) Un método para controlar una máquina para coger un objeto desde una primera posición y colocar el objeto en una segunda posición (4a, 4b, 4c), donde un miembro sensor proporciona datos sobre dicha primera posición a un miembro de control , caracterizado por -enviar un mensaje desde un proceso maestro del miembro de control que comprende uno o más de dichas primeras posiciones a todas las máquinas controladas por dicho miembro de control, -enviar un mensaje desde dicho miembro de control a todas las máquinas con un miembro indicados que especifica cual de una o más de dichas primeras posiciones deben utilizarse, -recibir un mensaje desde dicha máquina con un estado que indica que dicha primera posición
ha sido utilizada, -enviar un mensaje que comprende dicha primera posición , o más de…
DISPOSITIVO ADICIONAL DE CONTROL PARA MAQUINA CON CONTROL NUMERICO.
(16/04/2008). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR INVESTIG. CIENTIFICAS. Inventor/es: AKINFIEV,TEODOR, ARMADA RODRIGUEZ,MANUEL ANGEL, ROS TORRECILLAS,SALVADOR, RAMIREZ ROJAS,ADRIANA C, ALIQUE LOPEZ,JOSE MANUEL.
Dispositivo adicional de control para máquina con control numérico.#El dispositivo adicional de control tiene sujeto al cabezal a través de un elemento de conexión mecánica un componente para medir la distancia radial relativa al cabezal, tanto en el portaherramienta como en la parte cilíndrica. El dispositivo tiene un componente para la protección, cubre el componente para medir la distancia, el elemento de conexión mecánica y como mínimo, parcialmente el área de medida. El dispositivo tiene un módulo de elementos electrónicos para el cálculo de resultados relativos a las mediciones. El control numérico tiene conexión eléctrica con el módulo de elementos electrónicos.
MAQUINA HERRAMIENTA Y PROCEDIMIENTO PARA EL FUNCIONAMIENTO DE LA MISMA.
(16/07/2006) Procedimiento para hacer funcionar una máquina herramienta, que presenta un portaherramientas que se desplaza con relación a la pieza de trabajo, así como un primer mando para el mando de un movimiento de trabajo relativo de los portaherramientas referido a la pieza de trabajo, con las fases: - mando de las primeras trayectorias relativas del portaherramientas con ayuda de un primer programa de mando cargado en el primer mando, que define una serie de procesos de trabajo previstos secuencialmente, - detenimiento de los movimientos de trabajo relativos del portaherramientas al presentarse un suceso no planeado, y - nuevo arranque de los primeros movimientos de…
PROCEDIMIENTO Y DISPOSITIVO PARA MEDIR Y MAQUINAR PIEZAS.
(16/06/2006) Procedimiento para el mecanizado con desprendimiento de viruta y medición de piezas con superficies simétricas de rotación concéntricas o excéntricas, particularmente en cigüeñales y, en función de las mismas, la corrección, particularmente automática, de posiciones nominales de la herramienta respecto de la máquina herramienta en una pluralidad de posiciones de trabajo en la pieza , caracterizado porque - mediante un sensor de medición se determina para cada posición de ángulo de medición de la pieza solamente la distancia real máxima de un contorno de pieza a medir, por ejemplo, una superficie de un muñón de biela (H1), a un valor de referencia,…
PROCEDIMIENTO Y DISPOSITIVO PARA LA SINCRONIZACION DE MULTIPLES UNIDADES FUNCIONALES.
(01/04/2005). Solicitante/s: TWISTECHNOLOGY, S.L. Inventor/es: GALAN LLONGUERAS,JORDI.
Procedimiento y dispositivo para la sincronización de múltiples unidades funcionales. El procedimiento comprende la disposición, en cada una de las unidades funcionales, de un primer, y un segundo conjuntos de control, cada uno de los cuales tiene capacidad de entrada y salida de instrucciones, memorización y ejecución de funciones programadas, estando destinado el primero de dichos conjuntos de control a memorizar y enviar instrucciones a los órganos de la unidad funcional de acuerdo con las instrucciones recibidas desde el segundo conjunto de control, el cual se encuentra en conexión con el bus de comunicación con un controlador central o máster y es susceptible de recibir un juego de instrucciones y/o valores, de parámetros desde el controlador central, con capacidad de transferencia al primer conjunto de control bajo una instrucción del segundo conjunto, a la unidad funcional.
PROCEDIMIENTO DE GOBIERNO DE LA DEPOSICION DE MECHAS POR ENROLLAMIENTO O EN CONTACTO SOBRE ESTRUCTURAS DE GRANDES DIMENSIONES Y MAQUINA PARA LA PUESTA EN MARCHA DEL PROCEDIMIENTO.
(16/01/2005) LA INVENCION SE REFIERE A UN PROCEDIMIENTO DE CONTROL DE INSTALACION DE BROCAS POR ENROLLAMIENTO O POR CONTACTO EN ESTRUCTURAS DE GRANDES DIMENSIONES Y A UNA MAQUINA PARA SU PUESTA EN PRACTICA. EL PROCEDIMIENTO EN EL QUE SE EFECTUA LA INSTALACION EN UN MANDRIL ARRASTRADO EN ROTACION ALREDEDOR DE SU EJE ( ZE ), MEDIANTE UNA CABEZA DE INSTALACION APROPIADA, AJUSTABLE EN POSICION SEGUN AL MENOS UN PRIMER EJE DE DESPLAZAMIENTO RECTILINEO (X) PARALELO AL EJE DE ROTACION ( ZE ) DEL MANDRIL Y UN SEGUNDO EJE DE DESPLAZAMIENTO RECTILINEO (Y) ORTOGONAL A DICHO EJE DEL MANDRIL, SE CARACTERIZA PORQUE CONSISTE EN: TOMAR COMO EJE MAESTRO EL EJE DE ROTACION ( ZE ) DEL MANDRIL Y SOMETER LOS OTROS EJES (X, Y, BE , GA , 8, 9) A DICHO EJE MAESTRO, EN CONTROLAR EL EJE MAESTRO ( ZE ) POR REFERENCIAS DE VELOCIDAD SEGUN UN PROGRAMA PREESTABLECIDO, Y A PARTIR DE UNA TABLA…
MAQUINA DE RECTIFICACION CONTROLADA POR ORDENADOR.
(01/01/2005) Una máquina rectificadora controlada por ordenador programada para rectificar una pieza de trabajo calculando las posiciones requeridas del cabezal porta-muelas basadas en los parámetros de la pieza de trabajo obtenidos calibrando la pieza de trabajo y calculados en el supuesto de que el eje de la pieza de trabajo y el eje de la rueda de rectificación ocupan el mismo plano que la trayectoria de movimiento del eje de la rueda hacia o fuera de la pieza de trabajo, en la que la máquina es programa también para alterar las posiciones requeridas del cabezal porta-muelas durante la rotación de la pieza de trabajo para compensar por errores que resultan de la altura variada de la pieza de trabajo a medida que gira, caracterizada porque (a) se calcula un valor de posición requerida para cada…
PROCEDIMIENTO PARA EL TORNEADO EXCENTRICO Y APLICACIONES PREFERIDAS DEL PROCEDIMIENTO.
(16/03/2004) Procedimiento técnico de torneado para el torneado excéntrico en un torno programable, en el cual una pieza de trabajo rota en el plato del husillo de una máquina, generándose con una herramienta mediante desprendimiento de viruta determinados contornos al menos parcialmente excéntricos conformados o compuestos, por ejemplo, por elementos geométricos de transición, caracterizado porque el torneado se realiza en forma excéntrica por cuanto el patín cruzado se desplaza con la herramienta de desprendimiento de viruta sincronizadamente respecto del ángulo de husillo y los contornos excéntricos son generados mediante una programación de funciones de intermitencia a través del entrelazado de conjuntos de instrucciones con valores para parámetros direccionados seleccionados como, por ejemplo, diámetro (X), longitud (Z), elevación (F) o ángulo (C), en donde…
PROCEDIMIENTO PARA LA OBTENCION DE UN MODELO TRIDIMENSIONAL DEL TERRENO.
(16/12/2003). Ver ilustración. Solicitante/s: SANCHEZ HERRANZ,JORDI. Inventor/es: SANCHEZ HERRANZ,JORDI.
Procedimiento para la obtención de un modelo tridimensional del terreno. Consiste en: a) Seleccionar los datos necesarios de una base cartográfica y digitalizarlos para obtener una base cartográfica digital, o bien utilizar una base cartográfica numérica con los datos ya digitalizados. b) Obtener un modelo digital del terreno (MDT), mediante la utilización de Sistemas de Información Geográficos (SIG). c) Obtener una matriz de datos numéricos referentes a las coordenadas tridimensionales del terreno. d) Tratar la matriz de datos numéricos mediante subprogramas específicos para ordenarlos adecuadamente. e) Preparar la matriz de datos para lenguaje de control numérico(CN). f) Calibrar una máquina de CNC. g) Obtener el modelo tridimensional del terreno (MTT), mediante el mecanizado realizado por la máquina de CNC.
METODO PARA RECTIFICAR PIEZAS COMPUESTAS.
(16/07/2003). Solicitante/s: UNOVA U.K. LIMITED. Inventor/es: CLEWES, STUART, PICKLES, JOHN DAVID.
Método para la preparación de una máquina de rectificar , controlada por ordenador, para rectificar una pieza compuesta alargada que tiene regiones cilíndricas concéntricas , con una compensación de la excentricidad inducida por el proceso, en por lo menos una de las citadas regiones cilíndricas, en el que dicha región cilíndrica se rectifica cilíndricamente hasta obtener su forma final, caracterizado por las etapas de medir toda excentricidad no deseada inducida por el proceso de rectificado, así como la(s) posición(es) angular(es) de la misma en dicha región concéntrica, y ajustar las instrucciones del programa o las señales de control del avance de la muela almacenadas en el ordenador que controla la máquina de rectificar, de modo que, durante el rectificado ulterior de la pieza, se controle el avance de la muela para rectificar una forma excéntrica, igual y opuesta, a la medida, compensando de este modo la excentricidad inducida por el proceso.
PROCEDIMIENTO DE RECTIFICADO PARA UNA MAQUINA HERRAMIENTA ASISTIDA POR ORDENADOR, ESPECIALMENTE UNA MAQUINA RECTIFICADORA DE FORMA, SOBRE TODO DE LEVAS DE MANDO DE UN ARBOL DE LEVAS.
(16/07/2003). Solicitante/s: BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT. Inventor/es: SEITLINGER, KLAUS, INFANGER, JOSEF, MITTERAUER, JOHANN.
PARA UN METODO DE RECTIFICADO PARA UNA MAQUINA NTA CONTROLADA POR ORDENADOR, ESPECIALMENTE UNA RECTIFICADORA PARA RECTIFICAR EN PERFIL, SOBRE TODO LEVAS DE UN ARBOL DE LEVAS SE PROPONE UTILIZAR, POR LO MENOS PARA UN ACABADO DE PERFIL, UN REGISTRO DE DATOS DIFERENTE DEL REGISTRO DE DATOS DE MOLDEADO ACABADO BASADO EN LOS DATOS DE CONSTRUCCION, A FIN DE CONSEGUIR INTERVALOS DE TRABAJO MAS CORTOS. RESPECTO A ESE REGISTRO DE DATOS DE MOLDEADO ACABADO, EL NUEVO PRESENTA DATOS DE CONTROL DURADEROS PARA ERRORES DE MOLDEADO CAUSADOS POR LAS CONDICIONES DE LA MAQUINA PARA EL AJUSTE DE RECTIFICADO CORRESPONDIENTE CUANDO EN LO ESENCIAL HAY PREDETERMINADO UN NUMERO DE REVOLUCIONES CONSTANTE DE LA HERRAMIENTA RECTIFICADORA SOBRE LA ZONA DE MOLDEADO.
SISTEMA QUIRURGICO CONTROLADO POR MOTOR.
(16/06/2003) UN SISTEMA QUIRURGICO , ADAPTADO PARA FUNCIONAR CON AL MENOS UN DISPOSITIVO QUIRURGICO, TIENE UN MANGO QUE CONTIENE UN MOTOR QUE ESTA ADAPTADO PARA ALOJAR EL DISPOSITIVO QUIRURGICO. EL DISPOSITIVO QUIRURGICO ES IMPULSADO A TRAVES DE UN CIRCUITO CONTINUO DE POSICIONES POR EL ARBOL DE PROPULSION DEL MOTOR . UN MOTOR TIENE CONJUNTOS DE CONTACTOS DIRECCIONABLES PARA GENERAR SEÑALES ELECTRICAS DE ESTADO Y EL CONTROLADOR ES SENSIBLE A LAS SEÑALES DE ESTADO PARA CONTROLAR EL FUNCIONAMIENTO DEL MOTOR . LOS CONJUNTOS DE CONTACTOS DIRECCIONABLES SON INTERRUPTORES DE CIRCUITO DE EFECTO HALL DIRECCIONABLES CONECTADOS AL CONTROLADOR POR UN BUS DE CONTACTOS BIFILAR. EN CONEXION CON UN DISPOSITIVO ARTROSCOPICO, EL SISTEMA PERMITE AL CIRUJANO CONTROLAR EL FUNCIONAMIENTO DEL DISPOSITIVO DESDE EL MANGO. EL SISTEMA DE CONTROL QUIRURGICO…
PROCEDIMIENTO DE EVALUACION DEL ESTADO DE UNA PIEZA PARA MECANIZAR.
(01/12/2002) LA PRESENTE INVENCION DE REFIERE A UN METODO PARA EVALUAR UNA PIEZA DENTADA PARA MECANIZADO DE ACUERDO CON UN PROCESO DE MECANIZADO PREDETERMINADO. COMPRENDE MONTAR LA PIEZA EN UN EJE GIRATORIO EN UNA HERRAMIENTA MECANICA Y PROPORCIONAR UN METODO DE SONDEO EN LA POSICION DONDE SE PRODUCE UNA SEÑAL CUANDO EL FLANCO ANTERIOR O POSTERIOR DE LA PIEZA SE ENCUENTRA EN UNA POSICION PREDETERMINADA CON RESPECTO A LA SONDA . LA SEÑAL PRODUCIDA POR LA SONDA ES INDICATIVA DE LA POSICION DE ROTACION INSTANTANEA DEL EJE . EL EJE DE LA PIEZA GIRA PARA LLEVAR CADA UNO DE LOS FLANCOS SELECCIONADOS ANTERIORES O POSTERIORES DE LOS DIENTES A LA POSICION DE SONDEO PREDETERMINADA PARA GENERAR UNA SEÑAL;…
PROCEDIMIENTO DE CONTROL DE UNA MAQUINA HERRAMIENTA.
(01/12/2002) EN UNA MAQUINA HERRAMIENTA, UN COMPONENTE TAL COMO UNA MUELA ACTUA SOBRE UNA PIEZA PARA DAR A ESTA UNA FORMA CIRCULARMENTE ASIMETRICA, POR EJEMPLO, UN MUÑON DE CIGUEÑAL. EL MOVIMIENTO DE LA MUELA ES CONTROLADO POR UNA SEÑAL DE CONTROL QUE SE OBTIENE DE LAS POSICIONES RELATIVAS TEORICAS Y DE LAS VELOCIDADES DE POSICION DE LA MUELA CON RESPECTO A LA PIEZA QUE SE ESTA MECANIZANDO. EN UN CICLO DE CORRECCION, SE MIDEN LAS POSICIONES RESPECTIVAS DE LA MUELA CON RESPECTO A LA PIEZA PARA CADA UNA DE UNA SUCESION DE POSICIONES ANGULARES DE LA PIEZA. LAS POSICIONES MEDIDAS SON COMPARADAS CON LAS CORRESPONDIENTES POSICIONES TEORICAS Y LOS DATOS QUE INDICAN CUALQUIER DIFERENCIA SON ALMACENADOS Y POSTERIORMENTE…
METODO Y APARATO PARA EL RECTIFICADO DE PIEZAS COMPUESTAS.
(01/09/2002) SE DESCRIBE UN PROCEDIMIENTO PARA RECTIFICAR UNA PIEZA COMPUESTA A FIN DE OBTENER UN COMPONENTE QUE TENGA FORMAS CILINDRICAS CONCENTRICAS Y EXCENTRICAS . EL PROCEDIMIENTO COMPRENDE MONTAR LA PIEZA EN UNA MAQUINA RECTIFICADORA CONTROLADA POR ORDENADOR QUE TIENE UNA MUELA DE RECTIFICAR CUYO AVANCE Y RETIRADA PUEDE CONTROLARSE POR MEDIO DE UN PROGRAMA INTRODUCIDO EN EL ORDENADOR DE CONTROL , LA CARGA EN EL ORDENADOR DE UN PROGRAMA PARA CONTROLAR EL AVANCE LA MUELA, CON POSICIONAMIENTO RELATIVO DE LA MUELA RECTIFICADORA Y DE LA PIEZA PARA ALINEAR LA MUELA CON UNA PRIMERA ZONA SELECCIONADA DE LA PIEZA, EL AVANCE DE LA MUELA RECTIFICADORA EN DIRECCION A LA ZONA SELECCIONADA A FIN DE RECTIFICAR SU SUPERFICIE, EL CONTROL DE AVANCE…
{kind=link}
{kind=link}