MAQUINA ATOPORTANTE PARA DESPLAZAR HERRAMIENTAS DIVERSAS ENFRENTADAS AUNA SUPERFICIE VERTICAL.
Máquina autoportante para desplazar herramientas diversas enfrentadas a una superficie vertical,
en todas direcciones, caracterizada porque comprende una carcasa (7) suspendida por dos medios de sujeción (1, 2) tales como correas, cadenas, cables o similares, desde dos puntos fijos de amarre (5, 6) en las esquinas superiores izquierda y derecha de la superficie vertical a trabajar, conformando así los medios de sujeción una disposición en ángulo, situándose en su vértice la carcasa (7), ésta comprende dos motores, que recogen o sueltan ambos medios de sujeción independientemente, de forma controlada por un microprocesador, el cual calcula las distancias que debería haber desde la carcasa a ambos puntos de amarre (5, 6) en cada punto de la trayectoria de movimiento deseada, y actúa en consecuencia independientemente sobre cada motor ajustando la longitud de los medios de sujeción a las distancias calculadas, desplazando la carcasa por la trayectoria deseada sobre la superficie vertical, y trasladando cualquier herramienta fijada a ella
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200601046.
Solicitante: CORUJO TILVE,JUAN PABLO.
Nacionalidad solicitante: España.
Provincia: A CORUÑA.
Inventor/es: CORUJO TILVE,JUAN PABLO.
Fecha de Solicitud: 7 de Abril de 2006.
Fecha de Publicación: .
Fecha de Concesión: 11 de Marzo de 2010.
Clasificación Internacional de Patentes:
- A47L1/02 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47L LAVADO O LIMPIEZA DOMESTICA (cepillos A46B; limpieza de grandes cantidades de botellas o de otros objetos huecos de una sola especie B08B 9/00; lavado de la ropa D06F ); ASPIRADORES EN GENERAL (limpieza en general B08). › A47L 1/00 Limpieza de ventanas. › Máquinas o dispositivos con motor.
- B05B13/00A
- E04G23/00B
- G05D3/12K
Clasificación PCT:
- A47L1/02 A47L 1/00 […] › Máquinas o dispositivos con motor.
- B05B13/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B05 PULVERIZACION O ATOMIZACION EN GENERAL; APLICACION DE MATERIALES FLUIDOS A SUPERFICIES, EN GENERAL. › B05B APARATOS DE PULVERIZACION; APARATOS DE ATOMIZACION; TOBERAS O BOQUILLAS (mezcladores de pulverización con toberas B01F 5/20; procedimientos para aplicar líquidos u otros materiales fluidos a superficies por pulverización B05D). › Máquinas o instalaciones para aplicar líquidos u otras materias fluidas sobre la superficie de objetos o de materiales por pulverización, no cubiertas por los grupos B05B 1/00 - B05B 11/00 (procedimientos para aplicar líquidos u otras materias fluidas a las superficies en general B05D; medios para suministrar o refluir un líquido u otro material fluido con este fin, ver el apropiado de entre los grupos B05B 1/00 - B05B 12/00).
- E04G23/00 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04G ANDAMIAJES; MOLDES; ENCOFRADOS; HERRAMIENTAS O ACCESORIOS PARA LA CONSTRUCCION, O SU EMPLEO; MANIPULACIÓN DE LOS MATERIALES DE CONSTRUCCION EN LA PROPIA OBRA; REPARACION, DEMOLICION U OTROS TRABAJOS EN EDIFICIOS CONSTRUIDOS. › Operaciones en edificios existentes (en las cimentaciones E02D 35/00, E02D 37/00; relativos al aislamiento E04B; trabajos subsiguientes o de acabado E04F).
- G05D3/12 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 3/00 Control de la posición o de la dirección (G05D 1/00 tiene prioridad; control de programa numérico G05B 19/18). › utilizando realimentación.
Descripción:
Máquina autoportante para desplazar herramientas diversas enfrentadas a una superficie vertical.
Objeto de la invención
La presente invención tiene como objeto solucionar de forma sencilla y económica el problema del montaje y desplazamiento de máquinas que deben actuar sobre superficies verticales de difícil acceso como muros, fachadas acristaladas, cascos de barco, o cualquier superficie sobre la que haya que ejecutar con precisión y de forma automática trabajos como pueden ser trazado de dibujos, pintado, limpieza, detección de fallos de soldadura etc.
Antecedentes de la invención
No se conocen máquinas que se desplacen siguiendo el método aquí descrito.
Descripción de la invención
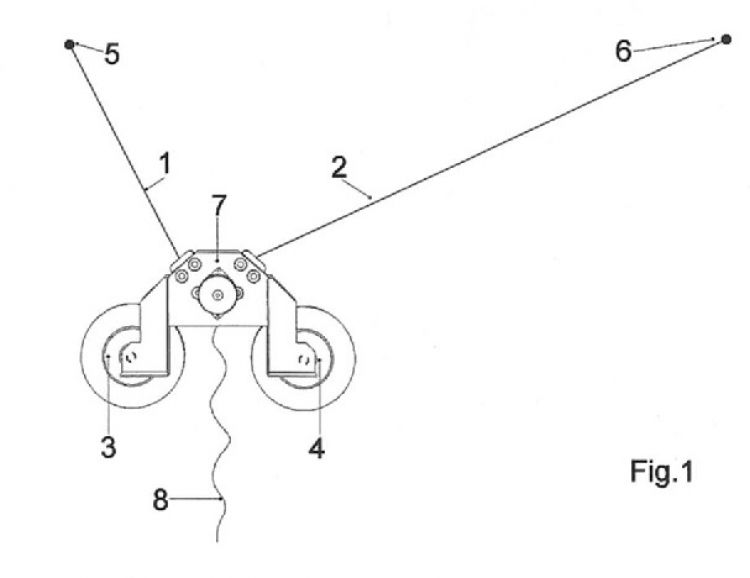
La máquina consta de un cabezal de tracción (7) caracterizado por que se cuelga de dos puntos de amarre (5,6) en las esquinas superiores izquierda y derecha de la superficie vertical a trabajar (en adelante "lienzo").
El medio de sustentación son dos correas dentadas abiertas, cadenas,cables o similares medios de transmisión (1,2) en adelante "correas", que son recogidas o soltadas independientemente, en la medida y velocidad precisa mediante 2 motores eléctricos de pasos (9,10), controlados por microprocesador (13), los cuales accionan sendos engranajes y poleas (15) incluidas en el cuerpo de la máquina.
Esta configuración en "V" que forman las correas permite el movimiento de la máquina tanto en horizontal, vertical, como en cualquier dirección deseada; dependiendo de la combinación de medida y la velocidad a la que se suelten o se recojan ambas correas.
Los movimientos de los motores están gobernados por un microprocesador (13) al cual se le trasladan las coordenadas a las que hay que desplazarse, éste calcula la trayectoria y ejecuta el movimiento correspondiente, a la velocidad deseada.
El algoritmo de trazado de movimiento consiste en calcular una trayectoria recta (o curva) entre dos puntos dados: El actual y el destino. Esta trayectoria tendrá tantos puntos como resolución permitan los pasos de los motores.
Por ejm: tomemos que un paso = 1 mm. de correa.
En cada punto de la trayectoria se calcula la longitud que deberían tener ambas correas en ese punto: desde la localización actual hasta el punto de amarre de la correa (1), y desde la localización actual hasta el punto de amarre de la correa (2). (ver Fig 1).
Si la distancia de una correa varía 1 mm. desde el anterior paso del algoritmo, se ejecuta un paso en el motor correspondiente, paso que será en una u otra dirección según la distancia se incremente o disminuya.
Con este sistema la máquina seguirá la trayectoria señalada hasta llegar al destino. Las órdenes son transmitidas mediante un cable (8) o un enlace inalámbrico desde un ordenador con software adecuado para automatizar el movimiento, hacer dibujos, trazadas, ejecutar acciones sobre la máquina ó comunicarse bidireccionalmente.
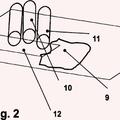
Las correas se recogen en sendos enrolladores (3,4) adosados en el cuerpo de la máquina, los cuales cuentan con sendos muelles internos de resorte espiral (11,12) que ejercen al menos la misma fuerza hacia arriba que la gravedad ejerce sobre la masa total de la máquina. Esto es para que ambas fuerzas se igualen lo más posible y, aunque no esté la máquina retenida por los motores y engranajes, pueda quedar fija en una posición determinada sin caerse por efecto de su propio peso. (ver Fig. 2). Además de esta manera se minimiza o anula el peso del conjunto, para que los motores funcionen óptimamente sin perder pasos.
La calibración se lleva a cabo mediante dos sistemas:
El primero son códigos inscritos en las correas cada centímetro o distancia menor, que son leídos por sensores ópticos,magnéticos o de otro tipo y transmitidos al procesador, el cual toma las decisiones oportunas de calibrado en caso necesario.
Este caso se puede dar cuando el código inscrito en una de las correas no coincide con el esperado, tomando en cuenta el numero de pasos dados por su respectivo motor. En ese caso, el microprocesador ordenará el retardo o adelanto de dicha correa hasta hacer coincidente el código inscrito (pasos reales) con el número de pasos del contador interno (pasos teóricos).
Otra calibración básica para el presente sistema consiste en recoger totalmente una de las correas hasta llegar al tope de fin de carrera, hecho esto soltarla y recoger totalmente la otra hasta su respectivo tope de fin de carrera, después de dicha operación el microprocesador calculará la posición precisa y el tamaño del "lienzo".
Por lo tanto, durante el montaje de la máquina en su localización de trabajo no es necesario medir la distancia entre los dos puntos de amarre 5 y 6 (Fig. 1) pues la máquina puede obtenerla por sí sola y adaptarse a las dimensiones del "lienzo". Basta con colgarla y activar la autocalibración. Si es necesario trabajar con una escala, el software se adaptará a cada tamaño automáticamente después de realizar la calibración. Es evidente que las dimensiones del "lienzo" tan sólo dependen de la longitud de los medios de sujeción que se pongan en el carrete enrollador (3,4), consiguiendo con esto una máquina de reducido tamaño pero capaz de ejecutar movimientos con toda precisión en superficies verticales muy amplias.
Todo el conjunto formado por los motores, poleas, recogedores y electrónica de control forman un aparato compacto y fácil de transportar y montar. (ver Fig 3). El diseño de este conjunto se caracteriza por ser completamente simétrico, dado que es un aparato que está colgado únicamente desde dos puntos como se ha explicado y el centro de gravedad debe estar en su punto central.
El método al que se refiere la presente invención puede implementarse en muy diversas máquinas y desarrollar desde pequeños juguetes hasta máquinas con una capacidad de transporte considerable como andamios colgantes.
Es en este cabezal de tracción donde pueden montarse los sistemas necesarios para cada caso por ejemplo, una pistola de pintura para hacer trazadas y dibujos de enorme tamaño, un dispositivo para limpiar los cristales por chorro de agua, un aparato para inspeccionar las soldaduras en cascos de buques, etc.
Dibujos
Con la intención únicamente de explicar gráficamente la invención y a modo de ejemplo no limitativo se proponen estas figuras de un modo de realización ya construido, el cual se caracteriza por emplear el método aquí expuesto para trazar figuras de gran formato en cualquier superficie vertical lisa. Este aparato, controlado por un ordenador personal con un software hecho para este cometido puede trazar cualquier dibujo, tipografía, o imagen en formato vectorial o rasterizado hasta un tamaño de 2,5 metros x 1,8 metros. (dispone de 3 metros de correa en cada enrollador).
La figura 1 presenta una configuración normal de la máquina, pequeña por motivos de espacio y claridad, colgada por sus dos medios de sujeción (1,2) y con un cable (8) de alimentación y datos a ordenador de control externo.
La figura 2 presenta una vista de corte del cabezal para mostrar la disposición de los piñones, engranajes y poleas y el recorrido que hacen las correas por el interior, así como la disposición de los muelles espirales (11,12) dentro de los enrolladores (3,4).
La figura 3 presenta una perspectiva del cabezal para mayor claridad.
La figura 4 muestra una vista de corte (sin el chasis) para ver la disposición de los mecanismos internos, en una perspectiva superior para mejor comprensión. Se observan unos rodillos para guiar las correas (14) y las poleas que las traccionan (15).
Reivindicaciones:
1. Máquina autoportante para desplazar herramientas diversas enfrentadas a una superficie vertical, en todas direcciones, del tipo de las que van suspendidas por dos medios de sujección de dimensión variable tales como correas, cadenas, cables o similares, desde las esquinas superiores, conformando una disposición en ángulo, caracterizada porque comprende una carcasa (7), que contiene dos motores de pasos (9,10), que recogen o sueltan independientemente dos medios de sujeción, caracterizados estos por estar fijados en su extremo a dos puntos de amarre en las esquinas superiores de la superficie vertical a trabajar, dicha carcasa se caracteriza por contener un microprocesador integrado (13) que calcula las distancias que debería haber desde la carcasa a ambos puntos de amarre (5,6) en todos y cada uno de los puntos de la trayectoria de movimiento deseada, y actúa en consecuencia independientemente sobre cada motor ajustando la longitud de los medios de sujección a las distancias calculadas desplazando por tanto la carcasa y cualquier herramienta fijada a ella por la trayectoria deseada sobre la superficie vertical.
2. Máquina autoportante según la reivindicación 1 caracterizada porque los dos medios de sujeción (1,2) son recogidos dentro de la carcasa de la máquina (7) en sendos recogedores cilíndricos (3,4) accionados por sendos muelles espirales internos (11,12), que ejercen en total al menos la misma fuerza de recogida que la fuerza ejercida por el peso de toda la máquina.
3. Máquina autoportante según la reivindicación 1 ó 2, caracterizada porque comprende dos sensores de fin de carrera que detectan el final de sendos medios de sujección y éstos medios de sujección llevan inscritos en toda su longitud a intervalos regulares códigos ópticos,magnéticos o de otro tipo, que son leídos por dos sensores adecuados y procesados por el microprocesador incluido para detectar la posición real de la carcasa respecto a ambos puntos de amarre (5,6), corrigiendo los desajustes sobre la posición teórica calculada por el microprocesador, mediante el adelanto o retraso del medio de sujección afectado hasta su correcta coincidencia.
Patentes similares o relacionadas:
CRISTAL AUTOPLIMPIABLE, del 2 de Julio de 2019, de HERNÁNDEZ YAGÜE, Ignacio: 1. Cristal autolimpiable, caracterizado esencialmente, porque está formado por un perfil horizontal que sirve de soporte para los componentes que realizan la limpieza […]
Método y dispositivo para limpieza ultrasónica, del 8 de Abril de 2019, de FUNDACION TEKNIKER: Método y dispositivo para limpieza ultrasónica. Un método para limpieza ultrasónica de una pieza que comprende: aplicar una solución de limpieza a una […]
DISPOSITIVO AUTÓNOMO PARA PINTAR PAREDES EN INTERIORES, del 6 de Diciembre de 2018, de UNIVERSIDAD TECNOLÓGICA DE PANAMÁ: Comprende: cuerpo de pintar, que soporta: recipiente para pintura, con tapón de recipiente; contrapeso, con depósito rellenable de material de contrapeso, […]
Lama de persiana aspersora, persiana aspersora y sistema para la limpieza de unasuperficie acristalada., del 9 de Mayo de 2018, de SUBIRANA ALCALDE, Miquel: La presente invención reivindica una lama de persiana aspersora que comprende una serie de boquillas en su cara interior, provistas para asperjar […]
SISTEMA Y MÉTODO AUTOMÁTICO PARA LA LIMPIEZA DE CRISTALES EN VENTANAS Y FACHADAS ACRISTALADAS, del 12 de Septiembre de 2017, de MARTÍNEZ LLORENS, Judit: Sistema y método automático para la limpieza de cristales en ventanas y fachadas acristaladas que comprende un sistema motriz , un elemento limpiador , un […]
Dispositivo de limpieza, del 16 de Agosto de 2017, de Jäger, Anton: Un dispositivo para la limpieza de superficies, con un cabezal limpiador que comprende al menos una base y al menos un conjunto de escobillas montado en la base , […]
Dispositivo de limpieza de cristales para ventanas de edificios, del 7 de Marzo de 2016, de BERMEJO PUMAR, María Mercedes: Dispositivo de limpieza de cristales para ventanas de edificios, en particular ventanas situadas a elevada altura en edificios, que comprende un sistema de proyección […]
 Robot para la limpieza de superficies lisas, del 3 de Febrero de 2016, de CARL FREUDENBERG KG: Robot autárquico para la limpieza de superficies lisas que comprende un cuerpo de base , presentando el cuerpo de base un dispositivo de traslación mediante el […]
Robot para la limpieza de superficies lisas, del 3 de Febrero de 2016, de CARL FREUDENBERG KG: Robot autárquico para la limpieza de superficies lisas que comprende un cuerpo de base , presentando el cuerpo de base un dispositivo de traslación mediante el […]