ROBOT CUADRUPEDO PARA PROCESOS TECNOLOGICOS.
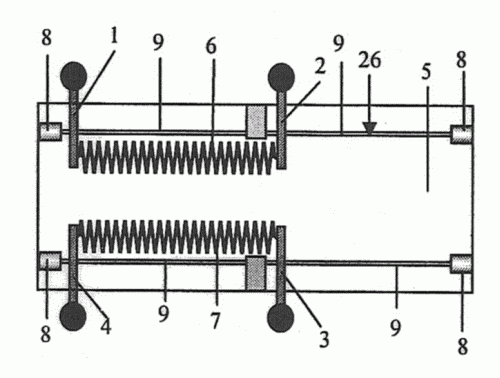
Robot cuadrúpedo para procesos tecnológicos que contiene dos elementos elásticos (6) y (7),
con uno de los extremos del primer elemento elástico (6) conectado a la pata (1), y el otro extremo conectado a la pata (2), y con un extremo del segundo elemento elástico (7) conectado a la pata (4) y el otro extremo conectado a la pata (3). Tanto la rigidez como la longitud de los elementos elásticos (6) y (7) es la misma, y la longitud se elige de tal manera que cada uno de los elementos elásticos (6) y (7) esté en estado de equilibrio sin deformación cuando una de las patas a la que está conectado el correspondiente elemento elástico está en una posición extrema y la otra pata está en la posición media (26) de la distancia entre sus posiciones extremas.
Tipo: Resumen de patente/invención.
Solicitante: CONSEJO SUP. INVESTIG. CIENTIFICAS.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: AKINFIEV,TEODOR, ARMADA RODRIGUEZ,MANUEL ANGEL, FERNANDEZ SAAVEDRA,ROEMI EMILIA.
Fecha de Solicitud: 31 de Mayo de 2004.
Fecha de Publicación: .
Fecha de Concesión: 2 de Febrero de 2007.
Clasificación Internacional de Patentes:
- B25J9/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › eléctricos.
Clasificación PCT:
- B25J9/12 B25J 9/00 […] › eléctricos.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Método de control de una máquina con actuación redundante paralela, dispositivo de control asociado y máquina, del 1 de Febrero de 2017, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (C.N.R.S.): Un método para controlar una máquina que comprende: - un marco , - un elemento móvil accionado en relación con dicho marco […]
SISTEMA DE INSPECCIÓN AUTÓNOMO, MÓVIL E INTELIGENTE DE REDES ELÉCTRICAS DE ALTA TENSIÓN Y CONDUCTOS DE LARGA DISTANCIA, del 4 de Marzo de 2016, de REMIS GARCÍA, Saul: 1. Sistema de inspección de redes eléctricas de alta tensión y conductos de larga distancia, caracterizado por: - Ser un robot inteligente, capaz de interpretar lo […]
ELEMENTO DE UNION DE UN GATO DE TUERCA Y TORNILLO Y SU APLICACION EN UN BRAZO DE ROBOT., del 1 de Julio de 2004, de COMMISSARIAT A L'ENERGIE ATOMIQUE COMPAGNIE GENERALE DES MATIERES NUCLEAIRES: Elemento de unión entre una primera pieza (A) y una segunda pieza (B), que comprende un gato de tuerca y de tornillo acoplado a través de la tuerca , un […]
ROBOT ACOPLADO MAGNETICAMENTE DE DOS EJES., del 16 de Octubre de 1996, de APPLIED MATERIALS, INC.: UN ROBOT QUE TIENE UN PAR DE ACOPLAMIENTOS MAGNETICOS QUE ACOPLA CADA UNO UN MOTOR EN UNA PRIMERA CAMARA CILINDRICA A UN ANILLO […]
ARTICULACION ROBOTICA., del 16 de Junio de 1995, de ROCKWELL INTERNATIONAL CORPORATION: ACTUADORES DE MATERIAL RIGIDO DE ACTUACION ELECTRICA DAN ARTICULACION A CORTADORES DE RAMAS ROBOTICOS. ACTUADORES PIEZOELECTRICOS POR EJ., PUEDEN SER USADOS EN VARIAS REALIZACIONES […]
MECANISMO DE LIBERACION UMBILICAL., del 16 de Mayo de 1995, de MEGAMATION INCORPORATED: UN MOTOR LINEAL QUE SE PUEDE MOVER A LO LARGO DE UN ESTATOR SUSTANCIALMENTE PLANO (P). HAY ACOPLADAS UNAS FUENTES ACCIONADORAS ELECTRICAS, MECANICAS Y NEUMATICAS AL […]
 ACCIONADORES POLIMERICOS Y PROCEDIMIENTOS PARA PRODUCIRLOS, del 16 de Marzo de 2008, de NATIONAL INSTITUTE OF ADVANCED INDUSTRIAL SCIENCE AND TECHNOLOGY
EAMEX CORPORATION: Un procedimiento para producir un accionador polimérico que comprende un producto de resina de intercambio iónico y electrodos metálicos que se forman sobre la superficie […]
ACCIONADORES POLIMERICOS Y PROCEDIMIENTOS PARA PRODUCIRLOS, del 16 de Marzo de 2008, de NATIONAL INSTITUTE OF ADVANCED INDUSTRIAL SCIENCE AND TECHNOLOGY
EAMEX CORPORATION: Un procedimiento para producir un accionador polimérico que comprende un producto de resina de intercambio iónico y electrodos metálicos que se forman sobre la superficie […]