PROCEDIMIENTO DE OPERACION DE UN SISTEMA DE DIRECCION EN UN VEHICULO AUTOMOVIL.
Procedimiento de operación de un sistema de dirección en un vehículo automóvil,
en que el procedimiento tiene los siguientes pasos de procedimiento,
- un servopar de motor (Mservo) es generado en el sistema de dirección para el apoyo a la dirección, en que un dato de par deseado (Mdes) es suministrado a un servomotor (9),
- el conductor proporciona a través del volante un par de dirección manual (Mmanual) en el sistema de dirección y en función de una magnitud de estado del vehículo o de operación del vehículo (dL,limit) es aumentada la resistencia frente a modificaciones de ángulo de dirección (?dL) de cara al incremento del par de dirección manual (Mmanual)) a aplicar por el conductor,
- como magnitud de estado o de operación del vehículo se tiene en cuenta una velocidad angular límite de dirección (dL,limit), en que la resistencia frente a modificaciones de ángulo de dirección (?dL) es aumentada, cuando es superada la velocidad angular límite de dirección (dL,limit), y en que
la velocidad angular límite de dirección (dL,limit) puede representarse en función del ángulo de dirección (dL), y la resistencia frente a modificaciones del ángulo de dirección (?dL) sólo es aumentada hasta una velocidad límite del vehículo (vlimit) que aparece al aparcar y en un intervalo central del ángulo de dirección dL
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07120699.
B62D5/04TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
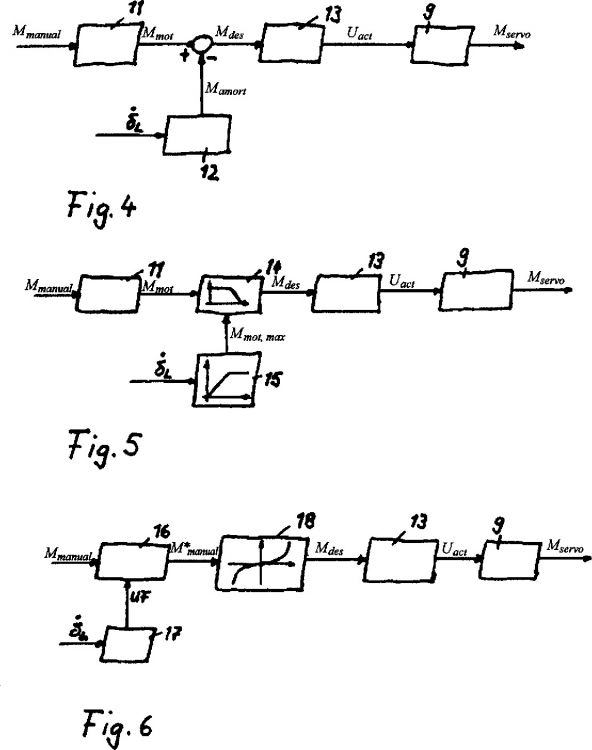
Procedimiento de operación de un sistema de dirección en un vehículo automóvil La invención se refiere a un procedimiento de operación de un sistema de dirección en un vehículo automóvil. En el documento DE 102 21 678 A1 se describe un sistema de dirección para un vehículo automóvil, al que está asociado un servomotor eléctrico, a través del que puede generarse un par de apoyo. En función de un par de dirección manual generado por el conductor se calcula un dato de par deseado, que es suministrado como magnitud de entrada al servomotor, tras lo cual se genera en el servomotor un servopar de motor. El servomotor puede estar dispuesto en un mecanismo de la dirección, a través del el ángulo de dirección proporcionado por el conductor es convertido en un ángulo de dirección de rueda. El documento JP 06-340270 A muestra un procedimiento de operación de un sistema de dirección en un vehículo automóvil, en que el procedimiento tiene los siguientes pasos de procedimiento: - un servopar de motor para el apoyo a la dirección es generado en el sistema de dirección, en que un dato de par deseado es suministrado a un servomotor, - el conductor proporciona a través del volante un par de dirección manual en el sistema de dirección, y en función de determinadas magnitudes de operación del vehículo es aumentada la resistencia frente a modificaciones del ángulo de dirección para el incremento del par de dirección manual a aplicar por el conductor, - como magnitudes de operación del vehículo se tienen en cuenta un límite superior para el ángulo de dirección y una velocidad angular límite de dirección, en que la resistencia frente a modificaciones del ángulo de dirección es aumentada cuando son superados respectivamente el límite superior para el ángulo de dirección y la velocidad angular límite de dirección, y en que la resistencia frente a modificaciones del ángulo de dirección sólo es aumentada por debajo de una velocidad límite del vehículo que aparece al aparcar. La potencia de dirección de sistemas de dirección controlables eléctricamente se diseña habitualmente para un proceso de aparcamiento. Para ello se tienen en cuenta como datos una velocidad de dirección mínima en función del ángulo de dirección o de la carrera de cremallera así como la fuerza de cremallera necesaria en función del ángulo de dirección o de la carrera de cremallera. A partir de estas magnitudes puede calcularse la potencia de cremallera necesaria como máximo, para la que se diseña el sistema de actuadores. A partir del diseño de actuadores y de las fuerzas de dirección que aparecen realmente en el vehículo resulta una velocidad de dirección alcanzable como máximo del servomotor en función de la carrera de cremallera o respectivamente del ángulo de dirección. Para todas las velocidades angulares de dirección por encima de este valor límite, el conductor debe contribuir mecánicamente a la dirección, para lo que debe superarse una considerable resistencia en el volante, lo que se refleja en un incremento correspondiente del par de dirección manual a aplicar por el conductor. La servofunción del sistema de dirección controlado eléctricamente hace posible que el conductor aparque con pares de dirección bajos. El diseño de potencia del sistema de dirección controlado eléctricamente se produce habitualmente para el punto con una potencia de dirección mecánica máxima. Debido a las pequeñas fuerzas de cremallera en el intervalo central, son sin embargo posibles en este intervalo de operación de la dirección velocidades muy altas, de modo que el conductor pueda acelerar muy fuertemente el volante en torno al intervalo central durante el proceso de aparcamiento. Al aumentar el ángulo de dirección aumenta la fuerza de cremallera y se reduce fuertemente la velocidad de dirección posible. Al cambiar entre el intervalo central y el intervalo exterior de la dirección, el conductor puede notar para velocidades angulares de dirección altas un aumento fuerte de la resistencia en el volante frente a modificaciones adicionales del ángulo de dirección, cuya resistencia debe ser superada mediante un par de dirección manual correspondientemente superior, que debe aplicar el conductor. Este fuerte aumento del par es considerado sin embargo por regla general como molesto por el conductor. La invención tiene como tarea mejorar el comportamiento de dirección en vehículos automóviles. Debe evitarse en particular para movimientos de dirección rápidos un aumento repentino de la resistencia en el volante frente a modificaciones del ángulo de dirección. Esta tarea es resuelta conforme a la invención con las características de la reivindicación 1. Las reivindicaciones subordinadas exponen perfeccionamientos convenientes. Mediante la invención se consigue el efecto de que el conductor debe aplicar de antemano un determinado par de dirección manual para modificaciones del ángulo de dirección. Con ello se elimina o se reduce considerablemente un aumento repentino de la resistencia frente a modificaciones del ángulo de dirección, con lo que se evitan efectos sorpresivos negativos. Dado el caso se asume ciertamente que el conductor debe aplicar fuerzas de dirección mayores; el nivel del par de dirección manual a generar como máximo puede llevarse sin embargo a un nivel deseado mediante un ajuste correspondiente del sistema de actuadores. A través de ello aumenta también la seguridad de evitar reacciones de pánico. 2 ES 2 335 544 T3 Como magnitud de estado o de operación del vehículo, de la que se hace depender la resistencia frente a modificaciones del ángulo de dirección, se toma en particular una velocidad angular límite de dirección, en que la resistencia frente a modificaciones del ángulo de dirección aumenta en caso de que se supere la velocidad angular límite de dirección. La velocidad angular límite de dirección se calcula continuamente en función del ángulo de dirección. El aumento de la resistencia de cara al incremento del par de dirección manual a aplicar por el conductor puede llevarse a cabo de diversos modos. Conforme a una realización conveniente, el dato de par deseado a suministrar al servomotor es limitado o respectivamente reducido, de modo que el conductor debe contribuir en mayor proporción al par de dirección, para obtener la modificación deseada del ángulo de dirección. La relación entre el par de dirección manual y el servopar de motor se desplaza en el sentido de un par de dirección manual más alto a generar por el conductor. Conforme a la invención, la resistencia frente a modificaciones del ángulo de dirección sólo es aumentada por debajo de una velocidad límite de vehículo que aparece al aparcar, que está situada por ejemplo en 15 ó 20 km/h. A través de ello se asegura que el aumento de resistencia sólo se lleva a cabo al aparcar o respectivamente maniobrar, pero no en la operación de conducción normal del vehículo para velocidades más altas y altas. La resistencia de dirección más alta al aparcar se compensa normalmente mediante un servopar correspondientemente aumentado; conforme a la invención está previsto aumentar, mediante medidas apropiadas, de modo artificial la resistencia frente a modificaciones del ángulo de dirección también al aparcar y maniobrar, de modo que el conductor debe aplicar un par de dirección manual aumentado. Las pequeñas pérdidas de confort asociadas a ello son compensadas por la seguridad aumentada que se consigue al evitar reacciones de pánico del conductor, que pueden producirse en movimientos de dirección rápidos en caso de una resistencia aumentada que aparece repentinamente tras una resistencia inicialmente baja. Conforme a otra realización ventajosa, la resistencia frente a modificaciones del ángulo de dirección es aumentada mediante el recurso de que es generado un par de amortiguación dependiente de la velocidad angular de dirección, cuyo par se opone a modificaciones del ángulo de dirección. Este par de amortiguación se genera habitualmente en un plano electrónico en un aparato de regulación o control del sistema de dirección mediante el recurso de que el dato de par deseado a proporcionar al servomotor es calculado en función del par de amortiguación, en particular a partir de la diferencia entre un par deseado de motor calculado en un regulador y el par de amortiguación dependiente de la velocidad angular de dirección. Restando el par de amortiguación del par deseado de motor se consigue una reducción del dato de par deseado que es suministrado al servomotor, de modo que como anteriormente se ha expuesto el conductor debe generar un par de dirección manual aumentado para la compensación del dato reducido de par deseado. Fundamentalmente entra en consideración sin embargo también una amortiguación a través de un componente separado en el sistema...
Reivindicaciones:
1. Procedimiento de operación de un sistema de dirección en un vehículo automóvil, en que el procedimiento tiene los siguientes pasos de procedimiento, - un servopar de motor (Mservo) es generado en el sistema de dirección para el apoyo a la dirección, en que un dato de par deseado (M des) es suministrado a un servomotor (9), - el conductor proporciona a través del volante un par de dirección manual (Mmanual) en el sistema de dirección y en función de una magnitud de estado del vehículo o de operación del vehículo (L,limit) es aumentada la resistencia frente a modificaciones de ángulo de dirección (L) de cara al incremento del par de dirección manual (M manual)) a aplicar por el conductor, - como magnitud de estado o de operación del vehículo se tiene en cuenta una velocidad angular límite de dirección (L,limit), en que la resistencia frente a modificaciones de ángulo de dirección (L) es aumentada, cuando es superada la velocidad angular límite de dirección ( L,limit), y en que la velocidad angular límite de dirección (L,limit) puede representarse en función del ángulo de dirección (L), y la resistencia frente a modificaciones del ángulo de dirección (L) sólo es aumentada hasta una velocidad límite del vehículo (vlimit) que aparece al aparcar y en un intervalo central del ángulo de dirección L. 2. Procedimiento según la reivindicación 1, caracterizado porque la resistencia frente a modificaciones del ángulo de dirección (L) es aumentada mediante el recurso de que el dato de par deseado (Mdes) a suministrar al servomotor (9) es limitado o reducido, o porque el servopar de motor (M servo) para el apoyo a la dirección es reducido en el sistema de dirección, mediante el recurso de que el par deseado de motor (M des) es limitado a un valor máximo (M mot,max). 3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque la limitación del par deseado de motor (Mmot,des) a un valor máximo (Mmot,max) se produce en función de la velocidad angular de dirección (L). 4. Procedimiento según una de las reivindicaciones 1 hasta 3, caracterizado porque la resistencia frente a modificaciones del ángulo de dirección (L) sólo es aumentada por debajo de una velocidad límite del vehículo (vlimit) de 20 km/h. 5. Procedimiento según una de las reivindicaciones 1 hasta 4, caracterizado porque la resistencia frente a modificaciones del ángulo de dirección (L) está realizada como una función de amortiguación dependiente de la velocidad angular de dirección (L), de tal modo que a la modificación del ángulo de dirección (L) se opone un par de amortiguación (Mamort) dependiente de la velocidad angular de dirección. 6. Procedimiento según la reivindicación 7, caracterizado porque el dato de par deseado (M des) a suministrar al servomotor (9) es calculado a partir de la diferencia entre un par deseado de motor (Mmot,des) calculado en un regulador y el par de amortiguación (Mamort) dependiente de la velocidad angular de dirección: Mdes = Mmot,des Mamort. 7. Procedimiento según una de las reivindicaciones 1 hasta 6, caracterizado porque la resistencia frente a modificaciones del ángulo de dirección ( L) es aumentada mediante el recurso de que el servopar de motor (M servo) para el apoyo a la dirección es reducido en el sistema de dirección, mediante el recurso de que el valor del par manual (Mmanual) es limitado por aplicación de un factor de limitación (UF). 8. Sistema de dirección con medios para llevar a cabo el procedimiento según una de las reivindicaciones 1 hasta 7, con al menos una rueda direccional de vehículo (8), un varillaje de dirección (7), un servomotor (9) y una unidad de regulación o control. 6 ES 2 335 544 T3 7 ES 2 335 544 T3 8 ES 2 335 544 T3 9
Patentes similares o relacionadas:
SISTEMA DE CONTROL REMOTO, del 18 de Diciembre de 2009, de EGENFELDT, SVEND: Sistema de control remoto que comprende: un dispositivo de entrada móvil accionado por el usuario , unos medios para detectar una entrada de fuerza […]
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende
• un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 SISTEMA DE CONTROL REMOTO, del 18 de Diciembre de 2009, de EGENFELDT, SVEND: Sistema de control remoto que comprende: un dispositivo de entrada móvil accionado por el usuario , unos medios para detectar una entrada de fuerza […]
SISTEMA DE CONTROL REMOTO, del 18 de Diciembre de 2009, de EGENFELDT, SVEND: Sistema de control remoto que comprende: un dispositivo de entrada móvil accionado por el usuario , unos medios para detectar una entrada de fuerza […]