PLATAFORMA PARA LA TOMA DE IMÁGENES AÉREAS.
Plataforma para la toma de imágenes aéreas.
Fabricada en fibra de carbono,
permite la toma de imágenes aéreas a baja altura y escala grande con bajo coste. Incluye un chasis (1) de fibra de carbono acoplado a un soporte (2) de fijación a un medio de elevación a través de un primer servomotor (3) de eje vertical. El chasis (1) está compuesto de una pieza superior (4) y de una base basculante (5), acopladas entre sí a través de un segundo servomotor (6) de eje horizontal. La base basculante (5) comprende un medio de fijación (7) para el acoplamiento de una cámara digital (8). Incorpora además un primer giróscopo (9) y un segundo giróscopo (10) que accionan los servomotores (3, 6) para contrarrestar los movimientos naturales del medio de elevaci6n transmitidos a la plataforma.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200803219.
Solicitante: UNIVERSIDAD DE SALAMANCA.
Nacionalidad solicitante: España.
Inventor/es: GONZALEZ AGUILERA,DIEGO, GOMEZ LAHOZ,JAVIER, MARTINEZ RUBIO,JOSE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64D47/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64D EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE DE GRUPOS MOTORES O DE TRANSMISIONES DE PROPULSION EN AERONAVES. › B64D 47/00 Equipamiento no previsto en otro lugar. › Disposiciones de cámaras.
- G01C11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Fotogrametría o videogrametría, p. ej. estereogrametría; Topografía fotográfica.
- G01C21/18 G01C […] › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Plataformas estabilizadas, p. ej. mediante giróscopo.
- G03B15/00 G […] › G03 FOTOGRAFIA; CINEMATOGRAFIA; TECNICAS ANALOGAS QUE UTILIZAN ONDAS DISTINTAS DE LAS ONDAS OPTICAS; ELECTROGRAFIA; HOLOGRAFIA. › G03B APARATOS O DISPOSITIVOS PARA HACER FOTOGRAFIAS, PARA PROYECTARLAS O VERLAS; APARATOS O DISPOSITIVOS QUE UTILIZAN TECNICAS ANALOGAS UTILIZANDO ONDAS DIFERENTES DE LAS ONDAS OPTICAS; SUS ACCESORIOS (partes ópticas de estos aparatos G02B; materiales fotosensibles para la fotografía o procedimientos fotográficos G03C; aparellaje para el tratamiento de materiales fotosensibles después de la exposición G03D). › Procedimientos especiales para hacer fotografías; Aparatos para este efecto.
Fragmento de la descripción:
fijación para el acoplamiento de una cámara digital.
Plataforma para la toma de imágenes aéreas.
Objeto de la invención
La presente invención está dirigida a una plataforma que, acoplada a un medio de elevación como un globo, zeppelín o similar, permite obtener imágenes aéreas del terreno para su uso en sectores como la arquitectura o la ingeniería. Antecedentes de la invención La fotogrametría aérea ha sido durante décadas una tecnología altamente especializada y efectiva en la generación de cartografía y productos derivados y, en la misma medida, ha sido una tecnología altamente cerrada, no sólo al gran público sino también a otras disciplinas o sectores. La progresiva digitalización de la disciplina, sin embargo, ha permitido una progresiva apertura de la misma a disciplinas afines y a otras comunidades científico-tecnológicas (arquitectos, ingenieros, etc.) .
Ya desde comienzos de la Primera Guerra Mundial se emplean imágenes aéreas con fines métricos, constituyendo una tecnología altamente eficaz y especializada para la generación de la cartografía de la superficie terrestre. En esta época las imágenes se tomaban desde aviones utilizando cámaras analógicas. Posteriormente, la llegada de los ordenadores desata la consolidación del enfoque digital, especialmente la flexibilización y divergencia de la Fotogrametría en cuanto a instrumental, métodos y disciplinas. Sin embargo, subsisten dos inconvenientes fundamentales, por un lado las molestias y el coste de la necesidad de emplear un avión, helicóptero o similar para la adquisición de imágenes con eje de toma vertical. En segundo lugar, aún empleando aviones o helicópteros, se mantiene la imposibilidad de volar por debajo de una determinada altura, y por consiguiente no se pueden conseguir las escalas y grados de precisión necesarios en sectores como la arquitectura y la ingeniería. Descripción de la invención
La presente invención describe una plataforma para la toma de imágenes aéreas que se acopla a un medio de elevación. El medio de elevación, en el presente documento, puede ser un globo, zeppelín, cometa, ultraligero, helicóptero, avioneta, y en general cualquier medio que permita elevar la plataforma hasta una altura adecuada para la toma de las imágenes.
Una ventaja de la invención es que está dotada de sistemas que garantizan la estabilidad ante los balanceos o giros que, de forma natural, realiza un medio de elevación suspendido en el aire.
Además, el material del que está hecha la plataforma no debe ser excesivamente pesado, ya que la fuerza ascensional de, por ejemplo, un zeppelín pequeño adecuado para este cometido, no supera los 5 Kg. De peso. Por tanto, se debe tratar de que todos y cada uno de los componentes que forman parte de la plataforma sean ligeros, más teniendo en cuenta que el mayor peso a sustentar será la cámara digital.
Por tanto, se describe una plataforma para la toma de imágenes aéreas que comprende los siguientes elementos:
1) Un chasis, acoplado a un soporte de fijación a un medio de elevación a través de un primer servomotor de eje vertical, comprendiendo el chasis una pieza superior y una base basculante acopladas entre sí a través de un segundo servomotor de eje horizontal, y 2) Un primer giróscopo solidario a la pieza superior y conectado al primer servomotor de eje vertical, y un segundo giróscopo solidario a la base basculante y conectado al segundo servomotor de eje horizontal, que accionan los servomotores para contrarrestar los movimientos naturales del medio de elevación transmitidos a la plataforma.
3) Un medio de localización, que almacena información acerca de la ubicación de la estructura en cada momento;
4) Un primer medio de comunicación, que permite que un usuario en tierra accione los servomotores para orientar la base basculante hacia una zona de interés.
5) Un segundo medio de comunicación, que permite que el usuario en tierra se comunique con la cámara digital para tomar imágenes de la zona de interés.
El medio de localización de la invención puede ser un dispositivo GPS, Glonass o Galileo.
El segundo medio de comunicación de la presente invención puede ser un disparador por infrarrojos.
La invención puede incorporar adicionalmente una microcámara de vídeo que transmite en tiempo real imágenes de la zona de interés hacia la que está orientada la cámara. Descripción de los dibujos
Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferente de realización práctica de la misma, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
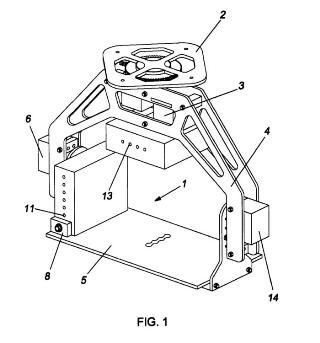
Figura 1. Muestra una vista en perspectiva de la plataforma de la invención. Realización preferente de la invención
Se describe a continuación una realización particular de la invención que se describe haciendo referencia a la figura adjunta.
La plataforma para la toma de imágenes aéreas de la invención comprende un chasis (1) , acoplado a un soporte (2) de fijación a un medio de elevación a través de un primer servomotor (3) de eje vertical, comprendiendo el chasis (1) una pieza superior (4) y una base basculante (5) acopladas entre sí a través de un segundo servomotor (6) de eje horizontal, y donde dicha base basculante (5) comprende un medio de fijación para el acoplamiento de una cámara digital (8) . El diseño del medio de fijación se ha desarrollado de forma que permita la incorporación de cualquier modelo de cámara digital (8) existente en el mercado.
Otros elementos fundamentales de la invención son un primer giróscopo solidario a la pieza superior (4) y conectado al primer servomotor (3) de eje vertical, y un segundo giróscopo solidario a la base basculante (5) y conectado al segundo servomotor (6) de eje horizontal, que accionan los servomotores (3, 6) para contrarrestar los movimientos naturales del medio de elevación transmitidos a la plataforma.
La invención incorpora adicionalmente un medio de localización (11) , que almacena información acerca de la ubicación del chasis (1) en cada momento, así como incorpora también un primer medio de comunicación (no representado) , que permite que un usuario en tierra accione los servomotores (3, 6) para orien
3 ES 2357743A1 4
tar la base basculante (5) hacia una zona de interés, e incorpora finalmente un segundo medio de comunicación (13) , que permite que el usuario en tierra se comunique con la cámara digital (8) para tomar imágenes de la zona de interés.
El chasis (1) de la invención está fabricado de manera preferente de fibra de carbono, debido a que es un material que posee propiedades mecánicas en grado suficiente y a que presenta la ventaja de tener un peso reducido, lo cual es una condición muy importante para la viabilidad de la invención.
Existe la posibilidad de emplear como medio de localización (11) un dispositivo GPS, Glonass o Galileo. El dispositivo utilizado como medio de localización (11) puede incorporar la función "data logger", la cual permite un registro continuo del posicionamiento global del conjunto para facilitar la georreferenciación de las imágenes (geo-tagging) . Otra función que puede incorporar el medio de localización (11) es la de asistencia al disparo de la cámara digital (8) mediante la emisión de una señal acústica que informa a un operador de la cámara digital (8) de la entrada en una zona pre-establecida óptima para efectuar el disparo.
La función del segundo medio de comunicación (13) de la presente invención puede ser realizada por un disparador por infrarrojos. En este caso, el disparador se compone de un cable con un terminal estándar de RC en uno de sus extremos y de un LED infrarrojo en el otro. Un pequeño microcircuito integrado soldado en el propio cable se encarga de la modulación de la señal de disparo, que es característica de cada modelo de cámara digital (8) .
La invención puede incorporar adicionalmente una microcámara de vídeo que transmite en tiempo real imágenes de la zona de interés hacia la que está orientada la cámara digital (8) .
La plataforma de la invención puede incorporar un tercer servomotor (14) de eje horizontal equivalente al segundo...
Reivindicaciones:
1. Plataforma para la toma de imágenes aéreas, caracterizada porque comprende los siguientes elementos:
un chasis (1) , acoplado a un soporte (2) de fijación a un medio de elevación a través de un primer servomotor (3) de eje vertical, comprendiendo el chasis (1) una pieza superior (4) y una base basculante (5) acopladas entre sí a través de un segundo servomotor (6) de eje horizontal, y donde dicha base basculante (5) comprende un medio de fijación para el acoplamiento de una cámara digital (8) ;
un primer giróscopo solidario a la pieza superior (4) y conectado al primer servomotor (3) de eje vertical, y un segundo giróscopo solidario a la base basculante (5) y conectado al segundo servomotor (6) de eje horizontal, que accionan los servomotores (3, 6) para contrarrestar los movimientos naturales del medio de elevación transmitidos a la plataforma;
un medio de localización (11) , que almacena información acerca de la ubicación de la estructura en cada momento;
un primer medio de comunicación, que permite que un usuario en tierra accione los servomotores (3, 6) para orientar la base basculante (5) hacia una zona de interés;
un segundo medio de comunicación (13) , que permite que el usuario en tierra se comunique con la cámara digital (8) para tomar imágenes de la zona de interés.
2. Plataforma de acuerdo con la reivindicación 1, caracterizada porque el chasis (1) está hecho de fibra de carbono.
3. Plataforma de acuerdo con la reivindicación 1, caracterizada porque el medio de localización (11) es un dispositivo GPS, Glonass o Galileo.
4. Plataforma de acuerdo con la reivindicación 3, caracterizada porque el medio de localización (11) incorpora una función "data logger", la cual permite un registro continuo del posicionamiento global del conjunto para facilitar la georreferenciación de las imágenes (geo-tagging) .
5. Plataforma de acuerdo con la reivindicación 3, caracterizada porque el medio de localización (11) incorpora una función de asistencia al disparo de la cámara digital (8) mediante la emisión de una señal acústica que informa a un operador de la cámara digital (8) de la entrada en una zona pre-establecida óptima para efectuar un disparo.
6. Plataforma de acuerdo con la reivindicación 1, caracterizada porque el segundo medio de comunicación (13) es un disparador por infrarrojos.
7. Plataforma de acuerdo con la reivindicación 1, caracterizada porque además comprende una microcámara de vídeo que transmite en tiempo real imágenes de la zona de interés hacia la que está orientada la cámara digital (8) .
8. Plataforma de acuerdo con la reivindicación 1, caracterizada porque incorpora adicionalmente un tercer servomotor (14) de eje horizontal equivalente al segundo servomotor (6) de eje horizontal, donde el giro del segundo servomotor (6) es sincrónico y contrapuesto al giro del tercer servomotor (13) , con el fin de aumentar el par de giro y evitar el esfuerzo de torsión que provocaría el uso de únicamente el segundo servomotor (6) .
ES 2 357 743 A1
OFICINA ESPAÑOLA DE PATENTES Y MARCAS
Nº solicitud: 200803219
ESPAÑA
Fecha de presentación de la solicitud: 11.11.2008
Fecha de prioridad:
INFORME SOBRE EL ESTADO DE LA TECNICA
51 Int. Cl. : Ver Hoja Adicional DOCUMENTOS RELEVANTES
Categoría Documentos citados Reivindicaciones afectadas X A A A US 5752088 A (DESSELLE ALEX S) 12.05.1998, todo el documento. US 4752791 A (ALLRED CHARLES N) 21.06.1988 US 5793541 A (CATTAN GILLES et al.) 11.08.1998 FR 2681957 A1 (SHINMAYWA IND LTD) 02.04.1993 1-7 1 1 1 Categoría de los documentos citados X: de particular relevancia Y: de particular relevancia combinado con otro/s de la misma categoría A: refleja el estado de la técnica O: referido a divulgación no escrita P: publicado entre la fecha de prioridad y la de presentación de la solicitud E: documento anterior, pero publicado después de la fecha de presentación de la solicitud El presente informe ha sido realizado • para todas las reivindicaciones • para las reivindicaciones nº : Fecha de realización del informe 13.04.2011 Examinador M. González Vasserot Página 1/5INFORME DEL ESTADO DE LA TÉCNICA
CLASIFICACIÓN OBJETO DE LA SOLICITUD
G03B15/00 (2006.01) G01C21/18 (2006.01) G01C11/00 (2006.01) B64D47/08 (2006.01)
Documentación mínima buscada (sistema de clasificación seguido de los símbolos de clasificación)
G03B, G01C, B64D
Bases de datos electrónicas consultadas durante la búsqueda (nombre de la base de datos y, si es posible, términos de búsqueda utilizados)
INVENES, EPODOC, WPI
OPINIÓN ESCRITA
Fecha de Realización de la Opinión Escrita: 13.04.2011
Declaración
Novedad (Art. 6.1 LP 11/1986) Reivindicaciones Reivindicaciones 4, 8 1-3, 5-7 SI NO Actividad inventiva (Art. 8.1 LP11/1986) Reivindicaciones 8 Reivindicaciones 1-7 SI NOSe considera que la solicitud cumple con el requisito de aplicación industrial. Este requisito fue evaluado durante la fase de examen formal y técnico de la solicitud (Artículo 31.2 Ley 11/1986) .
Base de la Opinión.
La presente opinión se ha realizado sobre la base de la solicitud de patente tal y como se publica.
OPINIÓN ESCRITA
1. Documentos considerados.
A continuación se relacionan los documentos pertenecientes al estado de la técnica tomados en consideración para la realización de esta opinión.
Documento Número Publicación o Identificación Fecha Publicación D01 US 5752088 A (DESSELLE ALEX S) 12.05.1998 D02 US 4752791 A (ALLRED CHARLES N) 21.06.1988 D03 US 5793541 A (CATTAN GILLES et al.) 11.08.1998 D04 FR 2681957 A1 (SHINMAYWA IND LTD) 02.04.19932. Declaración motivada según los artículos 29.6 y 29.7 del Reglamento de ejecución de la Ley 11/1986, de 20 de marzo, de Patentes sobre la novedad y la actividad inventiva; citas y explicaciones en apoyo de esta declaración El documento D1 puede considerarse como el representante del estado de la técnica más cercano ya que en este documento confluyen la mayoría de las características técnicas reivindicadas.
Contraste de la solicitud con el documento D1
Reivindicaciones independientes: Reivindicación 1 Plataforma para la toma de imágenes aéreas (ver Columna 1, líneas 4-7 de D1) , que comprende los siguientes elementos: *un chasis (ver referencia 301 y contorno 303 en la figura 2) , acoplado a un soporte de fijación a un medio de elevación (propulsor 310 en la figura 2) a través de un *primer servomotor (309 es un motor que acciona el propulsor 310 verticalmente con el eje 308 acoplado a la base basculante 301) de eje vertical, comprendiendo el chasis una pieza superior y una base basculante (léase en la Columna 2, líneas 7-9) acopladas entre sí a través de un *segundo servomotor de eje horizontal (la pieza 318 es el worm gear y el motor que actúa 320 sobre 318 sería el servomotor de eje horizontal) , y donde dicha base basculante (Columna 2, líneas 7-9) comprende un medio de fijación para el acoplamiento de una cámara digital (ver referencia 402 y leer la Columna 5, línea 7-22) ; *un primer giróscopo solidario a la pieza superior (el giróscopo 411 de la figura 2 controla a la cámara vertical y horizontalmente, indirectamente controla a los servomotores de eje vertical y horizontal) y conectado al *primer servomotor (309 es un motor que acciona el propulsor 310 verticalmente con el eje 308 acoplado a la base basculante 301) de eje vertical, y un *segundo giróscopo (esto se describe en la Columna 3, línea.
5. 67; Columna 4, líneas 1-46, Columna 5, líne.
3. 48; Columna 7, líneas 1, 2 del documento D1) solidario a la *base basculante (Columna 2, líneas 7-9) y conectado al *segundo servomotor de eje horizontal (la pieza 318 es el worm gear y el motor que actúa 320 sobre 318 sería el servomotor de eje horizontal) , que accionan los servomotores para contrarrestar los movimientos naturales del medio de elevación transmitidos a la plataforma (columna 2, líneas 12-14) ; *un medio de localización (Columna 7, 19-24 y Columna 7, 19-24) , que almacena información acerca de la ubicación de la estructura en cada momento (Columna 7, líneas 3-7) ; *un primer medio de comunicación, que permite que un usuario en tierra accione los servomotores (Columna 2, líneas 9-12; Columna 5, línea 7-23; Columna 6, línea.
3. 35) para orientar la base basculante (Columna 2, líneas 7-9) hacia una zona de interés; *un segundo medio de comunicación (leer Columna 6, línea.
3. 35) , que permite que el usuario en tierra se comunique con la cámara digital (referencia 407 cámara digital) para tomar imágenes de la zona de interés. Por tanto la reivindicación 1 no es nueva (Art. 6.1 LP 11/1986) al ser afectada por D1
Reivindicaciones dependientes:
Reivindicaciones 2-8 Plataforma donde el chasis (1) está hecho de fibra de carbono (leer en Columna 3, línea 9-14) . La reivindicación 2, por tanto, no tiene novedad (Art. 6.1 LP 11/1986) . Plataforma en el que el medio de localización (11) es un dispositivo GPS, Glonass o Galileo (obsérvese en la Columna 7, 1924) La reivindicación 3, tampoco tiene novedad (Art. 6.1 LP 11/1986) . Plataforma en el que el medio de localización (11) incorpora una función "data logger", la cual permite un registro continuo del posicionamiento global del conjunto para facilitar la georreferenciación de las imágenes (geo-tagging) . Se puede suponer que guarda la posición en memoria, es lo mínimo para poder controlar la posición. No tiene Actividad inventiva (Art. 8.1 LP 11/1986) esta reivindicación 4. Plataforma en el que el medio de localización (11) incorpora una función de asistencia al disparo de la cámara digital mediante la emisión de una señal acústica que informa a un operador de la cámara digital (léase en la Columna 6, líneas 3035) de la entrada en una zona pre-establecida óptima para efectuar un disparo.
OPINIÓN ESCRITA
Tampoco es nueva (Art. 6.1 LP 11/1986) la reivindicación 5. Plataforma donde el segundo medio de comunicación (13) es un disparador por infrarrojos, (ver en Columna 2, líneas 9-12; Columna 5, línea 7-23; Columna 6, línea.
3. 35) No es nueva (Art. 6.1 LP 11/1986) la reivindicación 6. Plataforma que además comprende una microcámara de vídeo que transmite en tiempo real imágenes de la zona de interés hacia la que está orientada la cámara digital (mirar en Columna 7, líneas 11-16) . Tampoco es nueva (Art. 6.1 LP 11/1986) la reivindicación 7. Plataforma donde se incorpora adicionalmente un tercer servomotor (14) de eje horizontal equivalente al segundo servomotor (6) de eje horizontal, donde el giro del segundo servomotor (6) es sincrónico y contrapuesto al giro del tercer servomotor (13) , con el fin de aumentar el par de giro y evitar el esfuerzo de torsión que provocaría el uso de únicamente el segundo servomotor (6) . En el documento D01, ni en ninguno de los otros, el giro del servomotor no es sincrónico ni contrapuesto al giro del otro servomotor. Por tanto esta reivindicación 8 sí es nueva (Art. 6.1 LP 11/1986) y tiene actividad inventiva (Art. 8.1 LP 11/1986) .
Patentes similares o relacionadas:
Dispositivo de imágenes para escenas en movimiento aparente, del 17 de Junio de 2020, de Urugus S.A: Un aparato para obtener imágenes de una escena que tiene movimiento aparente, el aparato que comprende: un dispositivo de imágenes de área […]
Estudio fotográfico para utilizar en una cocina, del 6 de Mayo de 2020, de Apicbase NV: Un aparato fotográfico para hacer fotos de platos de comida, que comprende, una plataforma en la que se coloca un plato, una fuente […]
Captación de corredor, del 29 de Abril de 2020, de nearmap australia pty, ltd: Un método para crear un ortomosaico de un área de corredor que consiste en una faja de tierra o de agua a lo largo de una trayectoria arbitraria , área […]
Un sistema de cámara aérea, del 8 de Enero de 2020, de Spookfish Innovations Pty Ltd: Un sistema de cámara aérea que comprende: al menos una cámara dispuesta para capturar una pluralidad de imágenes sucesivas, incluyendo […]
Guía de fotografía para vehículo, del 6 de Noviembre de 2019, de Audatex North America Inc: Un dispositivo de cámara que ayuda a un usuario a fotografiar un vehículo para documentar un estado del vehículo, que comprende una pantalla y una cámara; en el cual el dispositivo […]
Dispositivo y procedimiento de toma de imágenes de un objeto, del 20 de Noviembre de 2018, de Shakti: Dispositivo de toma de imágenes de un objeto , caracterizado por que incluye: - una óptica reflectiva que se extiende alrededor de un eje […]
Cámara 360º con marcado de zonas y sus formatos de imágenes y videos, del 12 de Septiembre de 2018, de VELAZ LOMBIDE, Iñigo: 1. Cámara 360º con marcado de zonas y sus formatos de imágenes y videos; caracterizada por disponer de un objetivo tipo ojo de pez para realizar fotografías y vídeos panorámicos […]
SISTEMA DE FOTOTRAMPEO PARA ZONAS REMOTAS, CON REDES DE ENERGÍA Y COMUNICACIÓN AUTÓNOMAS, del 21 de Junio de 2018, de AXIS INGENIERÍA, S.A. DE C.V: Un sistema de fototrampeo automático para ser ubicado en zonas remotas de difícil acceso, con red de suministro de energía renovable y red de […]