Aparato y método para determinar de manera confiable la posición de un objeto.
(05/06/2019) Aparato para determinar de manera confiable la posición de un objeto con respecto a un movimiento relativo entre el objeto y una trayectoria , que comprende:
un detector unido o integrado en el objeto ,
al menos un marcador ubicado a lo largo de la trayectoria ,
en el que el al menos un marcador es detectado por el detector dentro de su rango de detección espacial para determinar la posición del objeto con respecto al marcador ,
medios de generación para proporcionar una representación gráfica definible o una secuencia de representación gráfica, en la que dicha representación gráfica o secuencia de representación gráfica es detectada por…
Procedimiento y dispositivo para la determinación de la posición de un vehículo, programa de ordenador y producto de programa de ordenador.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(17/02/2016). Ver ilustración. Solicitante/s: PEPPERL + FUCHS GMBH. Clasificación: G05D1/02, G01D5/347, G01D5/26, B66C13/16, G01D5/249, B61L25/02, B66C13/46.
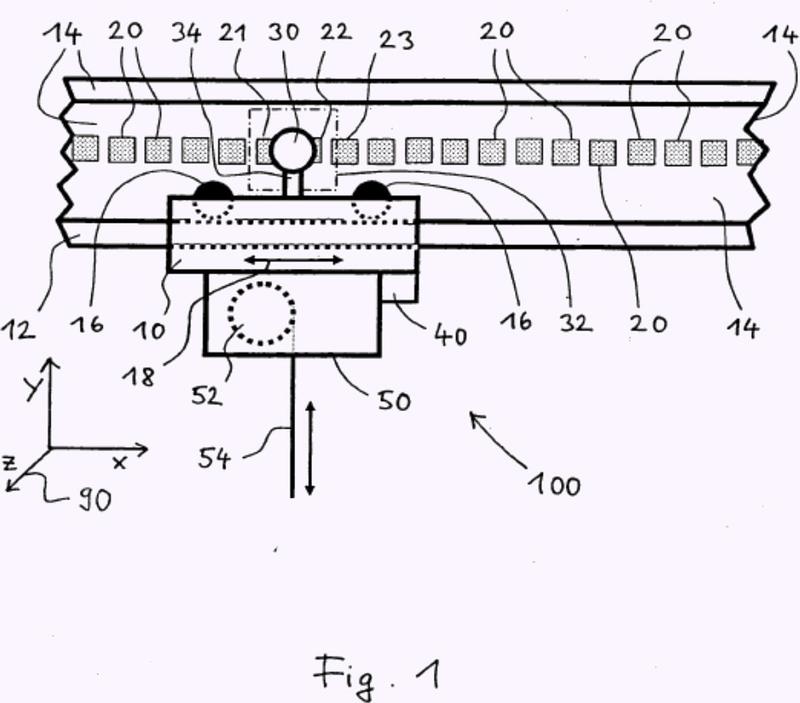
Procedimiento para determinar la posición de un vehículo que se mueve a lo largo de una trayectoria estando dispuestos a lo largo de la trayectoria marcadores , especialmente soportes de código o códigos de barras, caracterizado porque los marcadores se registran con una cámara digital dispuesta en el vehículo y porque, mediante procesamiento de imágenes, a partir de la imagen de al menos una imagen de marcador (71 a 74) en el área de alcance de la cámara digital se determina una posición relativa del vehículo con respecto al marcador correspondiente o a los marcadores correspondientes en el sentido de un sentido de movimiento principal (x) del vehículo a lo largo de la trayectoria y en al menos un sentido (y, z) transversal con respecto al sentido de movimiento principal (x) y porque a partir de cambios del tamaño de las imágenes de marcadores (71 a 74) se determinan cambios de distancia (Δz) del vehículo con respecto a la trayectoria.
PDF original: ES-2564810_T3.pdf
Procedimiento y dispositivo para determinar un intervalo de mantenimiento de un vehículo, programa informático y producto de programa informático.
(08/02/2016) Procedimiento para determinar un intervalo de mantenimiento de un vehículo, que se mueve a lo largo de una pista , en donde se registran y archivan datos de posición del vehículo , en donde se determina al menos un parámetro de mantenimiento, en donde el parámetro de mantenimiento se compara con un valor de referencia prefijado y en donde para indicar cuándo debe realizarse el mantenimiento del vehículo se emite una señal, si el parámetro de mantenimiento está en una relación determinada con el valor de referencia, en especial si es mayor que el valor de referencia, caracterizado porque el vehículo es un teleférico monorraíl, una carretilla para estanterías elevadas, una instalación de grúa o un carro de grúa, porque a…
Procedimiento y dispositivo para la determinación de la posición de un vehículo, programa de ordenador y producto de programa de ordenador.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(01/02/2016). Ver ilustración. Solicitante/s: PEPPERL + FUCHS GMBH. Clasificación: G05D1/02, G01D5/347, G01D5/26, B66C13/16, G01D5/249, B61L25/02, B66C13/46.
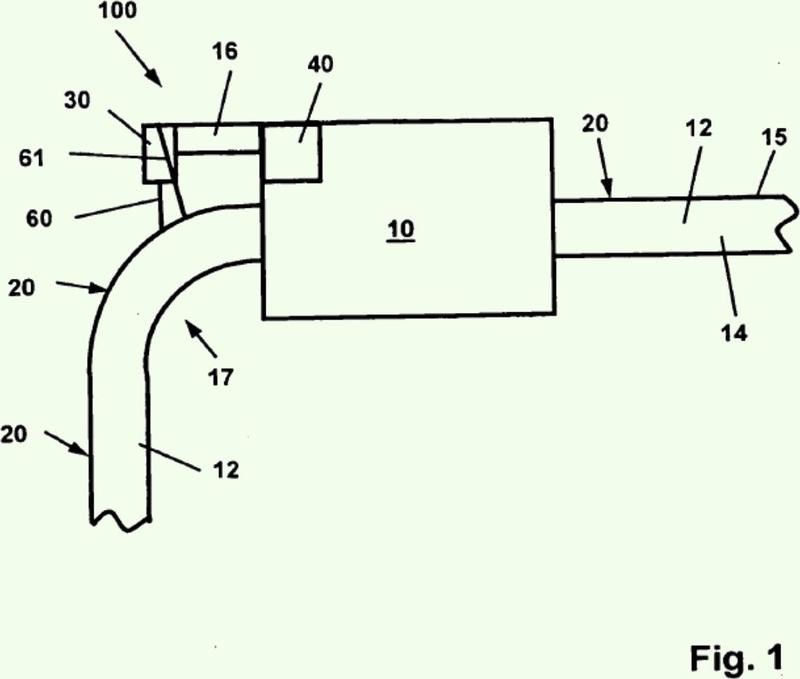
Procedimiento para la determinación de la posición de un vehículo que se mueve a lo largo de una vía , estando dispuestos a lo largo de la vía marcadores , en particular soportes de código o códigos de barras, que son detectados con una cámara digital dispuesta en el vehículo , caracterizado porque a partir de una posición de al menos una imagen de marcador en la zona de detección de la cámara digital y de una forma de la imagen de marcador o de las imágenes de marcadores se determina una posición relativa del vehículo respecto al marcador correspondiente o a los marcadores correspondientes con ayuda de procesamiento de imagen, porque se determina al menos un ángulo de basculamiento (ß) de un eje óptico de la cámara digital respecto a la vía y porque a partir de la distancia (E) de la cámara digital de un marcador y del ángulo de basculamiento (ß) o de los ángulos de basculamiento se determina una posición real de la cámara digital encima de la vía.
PDF original: ES-2558022_T3.pdf
Procedimiento y dispositivo para determinar la posición de un vehículo, programa de ordenador y producto de programa de ordenador.
(13/01/2016) Procedimiento para determinar la posición de un vehículo, que se mueve a lo largo de una pista , en donde a lo largo de la pista están dispuestos unos marcadores , en especial unos soportes de datos o códigos de barras, en donde los marcadores se detectan con una cámara digital dispuesta sobre el vehículo , y en donde mediante tratamiento de imágenes a partir de una posición de al menos una imagen de marcador, dentro del margen de detección de la cámara digital , se determina una posición relativa del vehículo con relación al respectivo marcador o el marcador respectivo, caracterizado porque en base a los datos de medición de un sensor de aceleración acoplado al vehículo se determina un recorrido (s) cubierto por el vehículo hasta un momento de consulta (t), porque se calcula una posición…
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR LA POSICIÓN DE UN VEHÍCULO, PROGRAMA INFORMÁTICO Y PRODUCTO DE PROGRAMA INFORMÁTICO.
(27/12/2011) Procedimiento para la determinación de la posición de un vehículo, que se puede desplazar a lo largo de una trayectoria , estando dispuestos a lo largo de la trayectoria unos marcadores en particular unos soportes de código o códigos de barra, caracterizado porque los marcadores se captan mediante una cámara digital dispuesta en el vehículo , porque mediante el tratamiento de la imagen se puede determinar a partir de una posición de por lo menos una imagen de marcador situada dentro del campo de determinación de la cámara digital una posición relativa del vehículo con respecto al marcador correspondiente o los marcadores correspondientes, porque mediante el tratamiento…
{kind=link}
{kind=link}