7 inventos, patentes y modelos de COLENS, ANDRE
MEJORAS A UN CORTACESPED ROBOTICO.
Sección de la CIP Necesidades corrientes de la vida
(01/05/2007). Solicitante/s: SOLAR & ROBOTICS S.A. Clasificación: A01D34/00.
Máquina robótica móvil cortacésped que incluye un microprocesador y una boquilla de corte , en la que se ha previsto un elemento elástico en tensión , solidario por una parte con el bastidor de la máquina y por otra parte con al menos la boquilla de corte , caracterizada por el hecho de que la altura de corte de la o de las boquillas de corte es controlada automáticamente de manera centralizada en función de un algoritmo, procesado por dicho microprocesador, tomando en cuenta la resistencia a la rotación del disco de corte y/o la posición de la máquina sobre dicha superficie, y de tal forma que el cortacésped no corte nunca el césped a más de una altura predeterminada a la vez.
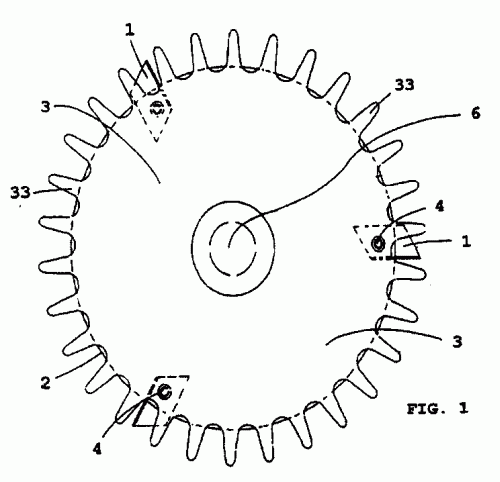
MEJORAS EN UNA BOQUILLA DE CORTE.
Sección de la CIP Necesidades corrientes de la vida
(01/04/2005). Ver ilustración. Solicitante/s: SOLAR & ROBOTICS S.A. Clasificación: A01D34/86, A01D34/82.
Cabeza de corte para máquina de corte, que incluye un motor cuyo eje de accionamiento está conectado con un disco de corte perpendicular a dicho eje y provisto en su periferia con al menos una lámina , y una placa inferior esencialmente paralela y situada debajo del disco de corte , la periferia de la placa inferior presentando unas extensiones esencialmente coplanares que se extienden radialmente más allá de la zona que puede ser alcanzada por las láminas , caracterizada por el hecho de que la placa circular tiene una dimensión, sin las extensiones , esencialmente igual o inferior a la dimensión del disco de corte sin las láminas.
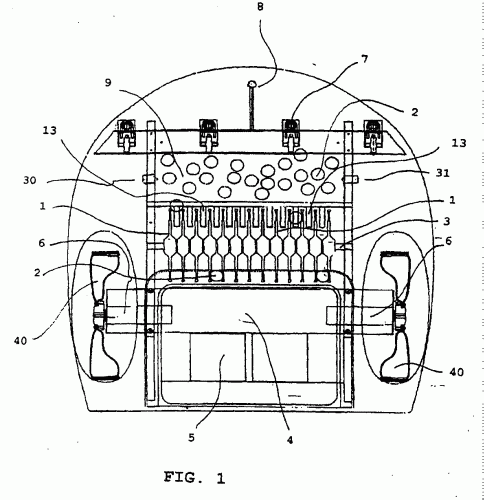
DISPOSITIVO AUTOMATICO DE RECOGIDA DE OBJETOS.
Sección de la CIP Necesidades corrientes de la vida
(16/02/2005). Ver ilustración. Solicitante/s: SOLAR & ROBOTICS S.A. Clasificación: A63B47/02, A01G1/12.
Sistema de recogida de objetos sobre una superficie determinada constituido por una máquina móvil automática provista de al menos un motor asociado a una fuente de energía , un dispositivo mecánico de prensión y de almacenamiento de los objetos dentro de un receptáculo soportado por la máquina móvil, un dispositivo de vaciado de dicho receptáculo, un dispositivo de limitación de la superficie de recogida , una estación de descarga de los objetos recogidos, y un ordenador de abordo que controla el avance de la máquina, caracterizado por el hecho de que la máquina automática evoluciona sobre la superficie de recogida, al menos por momentos, de manera aleatoria.
MEJORAS PARA UN CORTACESPED ROBOTICO.
Sección de la CIP Necesidades corrientes de la vida
(01/05/2004). Solicitante/s: SOLAR AND ROBOTICS S.A. Clasificación: A01D34/68.
Método de funcionamiento de un cortacésped robótico caracterizado por el hecho de que: - el cortacésped se sitúa a lo largo de un cable que delimita la periferia de la superficie que debe ser cortada, - un ordenador de a bordo recibe periódicamente la medida de la amplitud de la señal emitida por el cable periférico, - el ordenador envía al sistema de control las instrucciones para poner en funcionamiento el cortacésped a una distancia constante de dicho cable periférico, - el ordenador evalúa, en base a la medida de la distancia, que puede ser asociada ocasionalmente a una medida de los cambios de dirección, el momento en que el cortacésped ha realizado una vuelta completa a lo largo del cable, - el ordenador controla entonces un posicionamiento del cortacésped a una distancia de dicho cable superior a la anterior, con una diferencia igual o inferior a la anchura de corte.
MEJORAS EN LOS ROBOTS MOVILES Y EN SU SISTEMA DE MANDO.
(01/10/2002) Sistema de guiado y de posicionamiento con respecto a una estación fija para robot móvil autónomo que hace intervenir por lo menos un haz infrarrojo direccional (2) emitido por la estación fija, estando provisto el robot móvil de un sistema de detección (10a, 10b) direccional de emisión infrarroja conectado a un microordenador incorporado en el mencionado robot, desplazándose el robot sobre una superficie de trabajo de forma esencialmente aleatoria, comprendiendo el microordenador un algoritmo apto para gobernar el retorno a la estación fija por desplazamiento del robot hacia la dirección…
DISPOSITIVO Y SISTEMA AUTOMATICO PARA LA ELIMINACION DEL POLVO DEL SUELO.
Sección de la CIP Necesidades corrientes de la vida
(01/01/2000). Solicitante/s: SOLAR AND ROBOTICS S.A. Clasificación: A47L11/40, A47L9/28.
LA INVENCION SE REFIERE A UN DISPOSITIVO DE DESPOLVORAMIENTO DE SUELO QUE COMPRENDE UNA MAQUINA MOVIL AUTONOMA DOTADA DE DOS RUEDAS Y DE UN MEDIO DE ASPIRACION, DE UN RECIPIENTE DE POLVO, DE UN MEDIO DE DETECCION Y SALVAOBSTACULOS Y DE UNA UNIDAD DE CONTROL ELECTRONICO QUE COMPRENDE UN MICROPROCESADOR. EL DISPOSITIVO COMPRENDE TAMBIEN UN DISPOSITIVO CENTRAL DE DESCARGA DEL POLVO, ESENCIALMENTE FIJO, ASOCIADO A UN MEDIO DE GUIA QUE PERMITE A DICHA MAQUINA AUTONOMA ALCANZARLO PARA EL VACIADO PERIODICO DEL RECIPIENTE DE POLVO. EL DISPOSITIVO COMPRENDE TAMBIEN UNA UNIDAD DE RECARGA INTEGRADA AL DISPOSITIVO CENTRAL ARRIBA MENCIONADO, PARA RECARGAR LAS BATERIAS RECARGABLES CONTENIDAS EN LA MAQUINA MOVIL. EL MICROPROCESADOR ESTA ASOCIADO A UN ALGORITMO SALVAOBSTACULOS Y DE BUSQUEDA DEL ASPIRADOR CENTRAL Y DE LA UNIDAD DE RECARGA.
SISTEMA DE SEGADO CONTINUO Y AUTONOMO.
Sección de la CIP Necesidades corrientes de la vida
(01/05/1997). Solicitante/s: COLENS, ANDRE. Clasificación: A01D69/02, A01D34/64, A01D34/43.
LA INVENCION SE REFIERE A UN APARATO AUTOMATICO Y AUTONOMO PARA EFECTUAR EL CORTE DEL CESPED DE MANERA CONTINUA. EL APARATO ES ALIMENTADO POR CELULAS FOTOVOLTAICAS Y SE DESPLAZA BAJO LA ACCION DE RUEDAS O DE ORUGAS. UN DISPOSITIVO QUE COMPRENDE UN MICROORDENADOR PROGRAMADO POR UN ALGORITMO PERMITE LA BUSQUEDA DE LOS LUGARES DONDE EL CESPED DEBE SER CORTADO Y LA DETECCION DE LOS LIMITES DEL ESPACIO A CORTAR. LOS OBSTACULOS SON DETECTADOS Y CONTORNEADOS POR ANALISIS DE LOS MOVIMIENTOS RELATIVOS DE UNA PLACA SUPERIOR QUE LLEVA LAS CELULAS FOTOVOLTAICAS Y DE UN CHASIS INFERIOR.
{kind=link}
{kind=link}