6 inventos, patentes y modelos de CASANELLES MOIX,RAMON
Línea de corte y procedimiento para apilar piezas en bruto que salen de una cizalla o prensa de corte.
(29/05/2019) Línea de corte, que comprende un sistema de líneas de apilamiento para apilar las piezas en bruto que salen de la línea de corte, en el que de la línea sale una pluralidad de piezas en bruto del mismo tamaño, una después de la otra, a una velocidad de salida, comprendiendo dicho sistema de líneas de apilamiento
• una unidad de transferencia para recibir piezas en bruto que salen de la línea;
• por lo menos un soporte de apilamiento para apilar piezas en bruto sobre el mismo; y
• por lo menos dos robots industriales (5a, 5b, 5c, 5d),
• dichos robots (5a, 5b, 5c, 5d) están dispuestos respecto a la unidad de transferencia de manera que pueden operar en por lo menos
…
Sistema de líneas de apilamiento, y procedimiento para apilar piezas en bruto que son producidas por una cizalla o prensa de corte.
Sección de la CIP Técnicas industriales diversas y transportes
(30/11/2018). Solicitante/s: ABB SCHWEIZ AG. Clasificación: B25J9/00, B21D43/00, B65H31/00, B21D43/22.
Sistema de líneas de apilamiento para apilar piezas en bruto producidas por una cizalla o prensa de corte, comprendiendo el sistema de líneas de apilamiento
una unidad de transferencia para recibir piezas en bruto producidas por la cizalla o prensa de corte;
por lo menos un soporte de apilamiento para apilar piezas en bruto sobre el mismo; y
uno o más robots de apilamiento (5c, 5d) para coger piezas en bruto de la unidad de transferencia y colocarlas sobre el soporte de apilamiento;
caracterizado por el hecho de que comprende un sistema de guía de piezas en bruto que comprende por lo menos un robot de manipulación (5a, 5b) adaptado para colocar uno o más pivotes de centrado regulables para ayudar a la colocación de las piezas en bruto sobre el soporte de apilamiento.
PDF original: ES-2692224_T3.pdf
Carga de piezas en bruto a una línea de prensas de estampación.
(08/10/2018) Procedimiento para cargar piezas en bruto a una cabeza de una línea de prensas de estampación que comprende las etapas de:
disponer una pila de piezas en bruto en una posición de recogida; cargar piezas en bruto de la pila de piezas en bruto a la cabeza de la línea de prensas de estampación ; caracterizado por: antes de que se acabe la pila de piezas en bruto , crear un búfer elevando un número predeterminado de piezas en bruto desde la parte superior de la pila de piezas en bruto a una posición por encima de la pila de piezas en bruto , en el que elevar un número predeterminado de piezas en bruto se realiza por medio de uno o más robots de búfer (10a-10d), comprendiendo cada robot de búfer…
Sistema para manipular piezas en una línea de prensas.
Sección de la CIP Técnicas industriales diversas y transportes
(04/01/2017). Solicitante/s: ABB SCHWEIZ AG. Clasificación: B25J15/00, B25J9/00.
Un sistema para manipular piezas en una línea de prensas, que comprende
- al menos dos robots industriales , cada uno con una muñeca y un brazo auxiliar conectado a la muñeca por primeros medios giratorios respectivos, y
- una unidad de control para el control conjunto de dichos robots,
comprendiendo el sistema además
- una barra transversal conectada en un extremo de la misma al brazo auxiliar de un robot, y en otro extremo de la misma al brazo auxiliar de otro robot, por segundos medios giratorios respectivos,
- comprendiendo la barra transversal al menos dos porciones de barra transversal (5a,5b), cada una unida al brazo auxiliar de un robot y cada una dispuesta para llevar medios de pinza para coger piezas, y
- estando unidas las porciones de barra transversal entre sí a través de una disposición de desplazamiento de manera que son desplazables una con respecto a otra en su dirección longitudinal.
PDF original: ES-2621498_T3.pdf
DISPOSITIVO PARA LA MANIPULACION DE PIEZAS Y MANIPULADOR INDUSTRIAL DOTADO DE DICHO DISPOSITIVO.
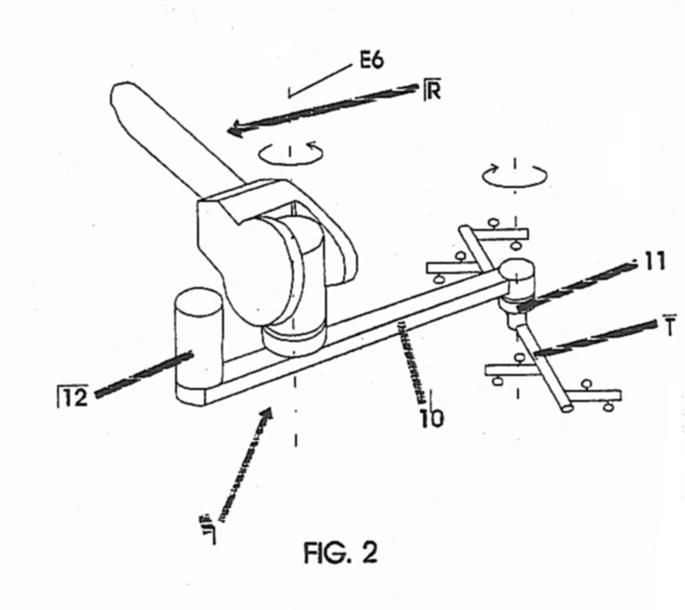
(24/05/2010) Dispositivo para la manipulación de piezas y manipulador (R)industrial dotado de dicho dispositivo, consistente en que el dispositivo está destinado a acoplarse a un manipulador industrial (R) con un elemento final (E6), y comprende un brazo rígido vinculado al elemento final (E6) del manipulador (R), un soporte montado móvil sobre el brazo y que 10 lleva acoplado de manera rígida un elemento de sujeción (T) de las piezas amanipular, y medios para accionar en movimiento el soporte respecto al brazo . En una realización, el brazo es solidarioen rotación al elemento final (E6) del manipulador y el soportees giratorio respecto…
DISPOSITIVO PARA LA MANIPULACION DE PIEZAS Y MANIPULADOR INDUSTRIAL DOTADO DE DICHO DISPOSITIVO.
Sección de la CIP Técnicas industriales diversas y transportes
(16/07/2007). Ver ilustración. Solicitante/s: ABB SISTEMAS INDUSTRIALES, S.A. Clasificación: B23Q7/04, B25J18/00.
Dispositivo para la manipulación de piezas y manipulador (R) industrial dotado de dicho dispositivo, consistente en que el dispositivo está destinado a acoplarse a un manipulador industrial (R) con un elemento final (E6), y comprende, un brazo rígido vinculado al elemento final (E6) del manipulador (R), un soporte montado móvil sobre el brazo y que lleva acoplado de manera rígida un elemento de sujeción (T) de las piezas a manipular, y medios para accionar en movimiento el soporte respecto al brazo . En una realización, el brazo es solidario en rotación al elemento final (E6) del manipulador y el soporte es giratorio respecto al brazo. El manipulador (R), con una cadena cinemática entre una base y un elemento final (E6), tiene un dispositivo como el descrito vinculado a dicho elemento final (E6). La invención permite tiempos de ciclo reducidos, de modo relativamente sencillo y seguro.
{kind=link}