16 inventos, patentes y modelos de AKINFIEV,TEODOR
DISPOSITIVO PARA LA MEDICION DE LA CANTIDAD DE LIQUIDO QUE FLUYE Y EL PROCEDIMIENTO PARA SU MEDICION.
(14/11/2012) Dispositivo para la medición de la cantidad de líquido que fluye y el procedimiento para su medición contiene situado dentro del receptor de líquido un flotador ubicado dentro de un limitador de movimiento del flotador situado cerca de la pared lateral del receptor de líquido , el flotador contiene un imán empotrado , y el receptor de líquido contiene por lo menos un interruptor de lámina , colocado en la base fuera del receptor de líquido cerca de la pared del receptor de líquido en la cual está colocado el limitador de marcha del flotador , de tal modo que cuando el flotador se halla en…
APARATO PARA LA TOMA DE MUESTRAS DE LIQUIDO Y EL PROCEDIMIENTO PARA SU CONTROL.
(18/05/2012) Aparato para la toma de muestras de líquido y el procedimiento para su control.
Aparato para la toma de muestras de líquido, compuesto por un cuerpo que está formado por una parte superior , una parte inferior y un elemento de transmisión cinemático que conecta dichas partes , un mecanismo de regulación de la longitud eficaz del elemento de transmisión cinemática , y primeros contenedores de muestras de líquido situados en la parte superior del cuerpo.
El procedimiento para su control se caracteriza porque se coloca el aparato en el líquido y se espera hasta el momento en el que se produzca el contacto de la parte inferior del cuerpo con…
DISPOSITIVO PARA LA RECOLECCION DE MUESTRAS DE LIQUIDO Y EL PROCEDIMIENTO PARA SU CONTROL.
(18/05/2012) Dispositivo para la recolección de muestras de líquido y el procedimiento para su control.
Dispositivo para la recolección de muestras de líquido, compuesto por un cuerpo que está formado por una parte superior , una parte inferior y un elemento de transmisión cinemático que conecta dichas partes , un mecanismo de regulación de la longitud eficaz del elemento de transmisión cinemático , y primeros contenedores para las muestras de líquido situados en la parte inferior del cuerpo.
El procedimiento para su control se caracteriza porque se reduce al máximo la longitud eficaz del elemento de transmisión cinemático , y a continuación se coloca el dispositivo en el líquido y se regula la longitud eficaz del elemento de transmisión cinemático hasta el momento en el que se alcanza la longitud correspondiente a la profundidad…
DISPOSITIVO PARA LA MEDICIÓN DE LA CANTIDAD DE LÍQUIDO QUE FLUYE Y EL PROCEDIMIENTO PARA SU MEDICIÓN.
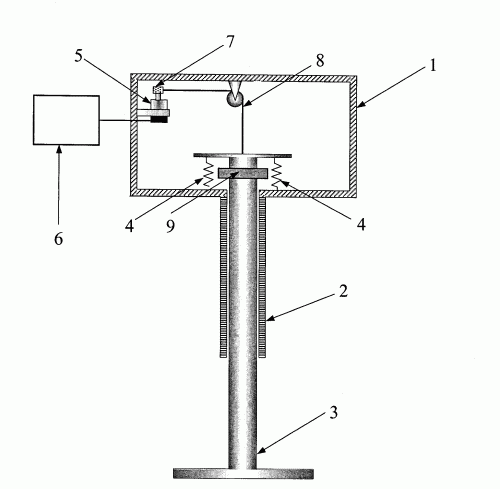
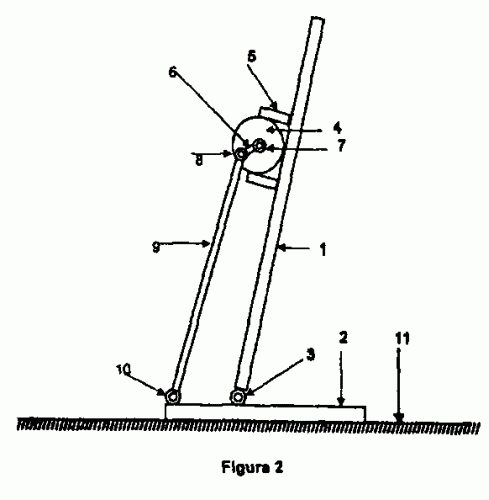
(30/01/2012) Dispositivo para la medición de la cantidad de líquido que fluye y el procedimiento para su medición.Dispositivo para la medición de la cantidad de líquido que fluye, compuesto por una báscula con una plataforma para el peso a medir en la que se coloca un soporte del que pende el receptor de líquido , y un tubo flexible que está sujeto por dos fijadores , con un primer fijador conectado al soporte , y un segundo fijador conectado a la base , de forma que el ángulo formado entre el horizonte y la línea tangente en cualquier punto del tubo flexible comprendido entre los fijadores , es mayor que el valor A1 definido previamente.El procedimiento para la medición de la cantidad de líquido se caracteriza porque se realiza la medición i del peso Pi de los dispositivos colocados en la báscula con un intervalo de tiempo predeterminado Tl
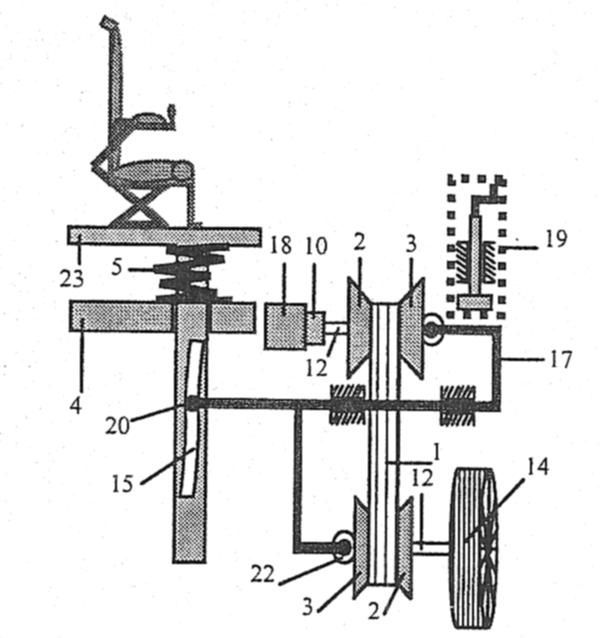
ACTUADOR DE UN ELEMENTO DE TRABAJO PRINCIPALMENTE DE UN ROBOT MOVIL PARA EL TANSPORTE SOBRE UNA PLATAFORMA ESPECIAL DE PERSONAS Y/O COSAS Y SU METODO DE CONTROL.
Secciones de la CIP Técnicas industriales diversas y transportes Mecánica, iluminación, calefacción, armamento y voladura
(27/10/2009). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS. Clasificación: B66F11/04, B66B11/08, F16H9/16.
Actuador de un elemento de trabajo principalmente de un robot móvil para el transporte sobre una plataforma especial de personas y/o cosas y su método de control.#Actuador de un elemento de trabajo , tiene una plataforma especial , contiene un sistema de control y un mecanismo de transmisión variable. El mecanismo para el movimiento progresivo a lo largo del eje está conectado con cada uno de los elementos cónicos deslizantes en un mecanismo de transmisión variable. El cambio de la relación de transmisión entre el motor y el elemento de trabajo se realiza automáticamente. Este cambio es realizado una vez antes de la ejecución del movimiento del elemento de trabajo . Este cambio es realizado continuamente en tiempo de ejecución del movimiento del elemento de trabajo.
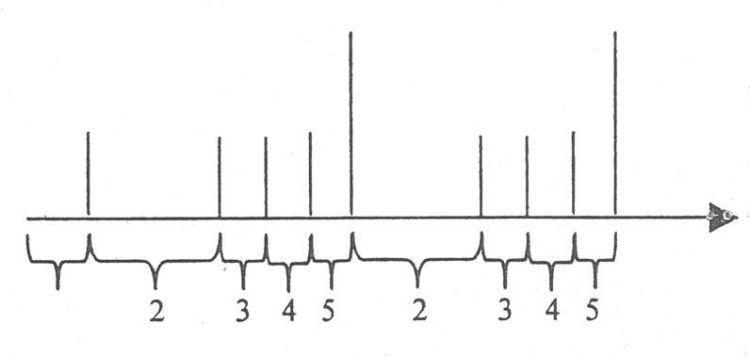
METODO DE CONTROL PARA MAQUINA CON CONTROL NUMERICO.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(16/03/2009). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR INVESTIG. CIENTIFICAS. Clasificación: G05B19/416, B23Q15/00.
Método de control para máquina con control numérico.#El método de control para máquina con control numérico contempla los siguientes pasos:#- Se miden y se registran las variables del proceso de mecanizado en al menos parte de la trayectoria de trabajo.#- Se calculan y se registran las propiedades del proceso de mecanizado en al menos parte de la trayectoria de trabajo.#- Se comparan las propiedades del proceso de mecanizado medidas con valores definidos previamente.#- Se continúa con la ejecución de la operación de mecanizado sin cambio alguno de los parámetros del proceso de mecanizado si las propiedades medidas se encuentran dentro de los límites establecidos por los valores definidos previamente.#- Se cambia automáticamente los parámetros del proceso de mecanizado, por tanto, se cambia automáticamente el programa si las propiedades medidas se encuentran fuera de los límites establecidos por los valores definidos, previamente.
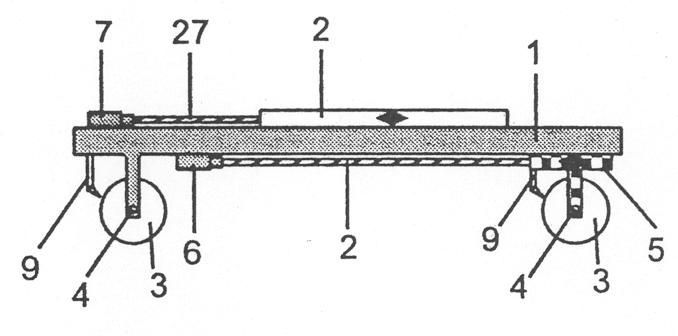
DISPOSITIVO PARA EL TRANSPORTE DE PERSONAS O COSAS Y EL PROCEDIMIENTO PARA SU CONTROL.
Sección de la CIP Técnicas industriales diversas y transportes
(16/06/2008). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR INVEST.CIENTIFICAS. Clasificación: B62D61/12, B62B5/02.
Dispositivo para el transporte de personas o cosas y el procedimiento para su control.#La conexión de al menos uno de los ejes con el cuerpo del dispositivo se realiza a través de un elemento móvil que permite la traslación relativa del eje con respecto al cuerpo y que se encuentra cinemáticamente conectado al motor del elemento móvil. El motor del elemento móvil está fijado en el cuerpo del dispositivo. Además, cada una de las ruedas contiene un elemento fijador conectado al sistema de control que impide la rotación de las mismas alrededor de sus ejes respectivos, al menos en una dirección.
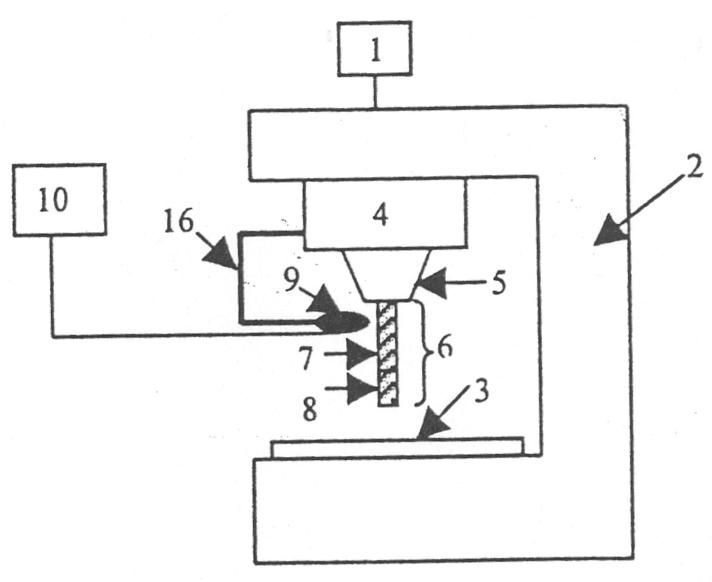
DISPOSITIVO ADICIONAL DE CONTROL PARA MAQUINA CON CONTROL NUMERICO.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(16/04/2008). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR INVESTIG. CIENTIFICAS. Clasificación: B23Q17/24, G05B19/18, B23Q15/22.
Dispositivo adicional de control para máquina con control numérico.#El dispositivo adicional de control tiene sujeto al cabezal a través de un elemento de conexión mecánica un componente para medir la distancia radial relativa al cabezal, tanto en el portaherramienta como en la parte cilíndrica. El dispositivo tiene un componente para la protección, cubre el componente para medir la distancia, el elemento de conexión mecánica y como mínimo, parcialmente el área de medida. El dispositivo tiene un módulo de elementos electrónicos para el cálculo de resultados relativos a las mediciones. El control numérico tiene conexión eléctrica con el módulo de elementos electrónicos.
ROBOT CUADRUPEDO PARA PROCESOS TECNOLOGICOS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/03/2007). Ver ilustración. Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Clasificación: B25J9/12.
Robot cuadrúpedo para procesos tecnológicos que contiene dos elementos elásticos y , con uno de los extremos del primer elemento elástico conectado a la pata , y el otro extremo conectado a la pata , y con un extremo del segundo elemento elástico conectado a la pata y el otro extremo conectado a la pata . Tanto la rigidez como la longitud de los elementos elásticos y es la misma, y la longitud se elige de tal manera que cada uno de los elementos elásticos y esté en estado de equilibrio sin deformación cuando una de las patas a la que está conectado el correspondiente elemento elástico está en una posición extrema y la otra pata está en la posición media de la distancia entre sus posiciones extremas.
APARATO PARA EL CALENTAMIENTO AUTOMATICO DE COMESTIBLES.
Sección de la CIP Necesidades corrientes de la vida
(16/04/2006). Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Clasificación: A47J37/04.
Aparato para el calentamiento automático de comestibles Aparato para el calentamiento automático de comestibles, que contiene un cuerpo en el que se encuentra un depósito de comestibles con recipientes individuales, un calentador de comestibles, una ventana de entrega de comestibles y un sistema de transporte para el traslado individual de recipientes de comestibles del depósito al calentador y del calentador a la ventana de entrega. El objetivo de la invención es ampliar las posibilidades funcionales del dispositivo a costa del giro del comestible durante el calentamiento. Eso permitirá obtener un calentamiento más uniforme del comestible y, a costa de ello, mejorar sus cualidades de consumo.
ROBOT SALTADOR Y PROCEDIMIENTO PARA SU CONTROL.
Sección de la CIP Técnicas industriales diversas y transportes
(01/10/2005). Ver ilustración. Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Clasificación: B62D57/02.
Robot saltador y procedimiento para su control. Robot saltador para el movimiento en terrenos con obstáculos, que contiene al menos un resorte con uno de sus extremos unido al cuerpo del robot, y una cadena cinemática entre el motor y el resorte que comprende un cilindro conectado con el eje del motor y una cuerda , con uno de sus extremos conectado al cilindro y con el segundo extremo conectado al pie . El procedimiento de control se caracteriza porque en el momento en el que el pie pierde el contacto con el suelo se hace girar al motor un ángulo {al}, y se mantiene en dicha posición hasta el próximo contacto del pie con el suelo, momento en el que se hace girar al motor un ángulo -{al}.
ACTUADOR PARA MOVIMIENTO DE ARRANQUE -PARADA, PRINCIPALMENTE EN ROBOTSCAMINANTES, Y EL PROCEDIMIENTO PARA SU CONTROL.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes Necesidades corrientes de la vida
(16/03/2005). Ver ilustración. Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Clasificación: F16H21/18, B62D57/02, A63H31/08, A63H11/18.
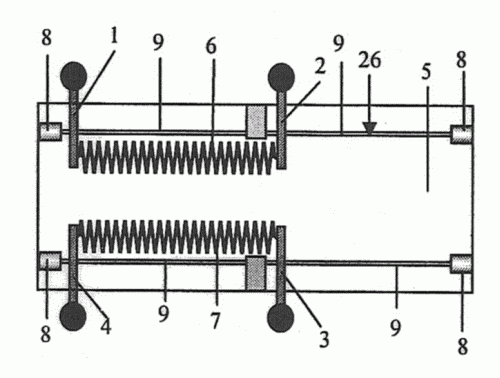
Actuador para movimientos de arranque-parada, principalmente en robots caminantes, y el procedimiento para su control. Actuador para movimientos de arranque-parada, que se caracteriza porque la conexión cinemática entre el motor y el elemento de trabajo contiene un eslabón móvil conectado a la base y con posibilidad de rotación alrededor del punto de conexión, una corredera que se desliza a lo largo del eslabón móvil , y una manivela conectada cinemáticamente con el motor y unida a charnela por medio del dedo con la corredera . El procedimiento para su control se caracteriza porque el movimiento del elemento de trabajo se realiza a través del eslabón móvil , rotando la manivela con la ayuda del motor y porque las posiciones de arranque y parada están determinadas por el ángulo formado entre la manivela y el eslabón móvil.
METODO DE CONTROL DE VEHICULOS.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(01/09/2004). Ver ilustración. Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Clasificación: B60L3/00, G01L5/13, B60K28/16, G05D17/00.
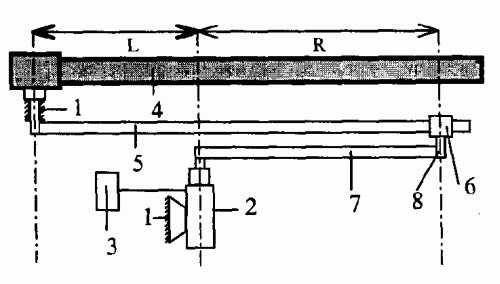
Método de control de vehículos. Se realiza con motores en más de una rueda, midiendo la velocidad angular en cada una de las ruedas con motores y calculando el par de carga de los motores en las ruedas, estos pares se controlan con un sistema de control en el cual el control de velocidad de la primera rueda se hace de tal forma que se minimice la diferencia entre la velocidad de esta rueda en ese instante y la velocidad predeterminada en el mismo momento mientras se verifica que el par de carga T{sub,1} no sobrepase el par de carga límite T{sub,1}{sup,*} y el control del par de las diferentes ruedas restantes se realiza de manera que el par de carga T{sub,i} sea menor al par de carga límite T{sub,i}{sup,*} y en esta condición se intentará minimizar en lo posible **FIGURA** , donde i=2-n, y n es el número de ruedas con motores.
DISPOSITIVO PARA LA VENTA AUTOMATICA DE PRODUCTOS.
Secciones de la CIP Física Necesidades corrientes de la vida
(16/08/2004). Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS. Clasificación: G07F11/00, A63F13/00.
Dispositivo para la venta automática de productos. El dispositivo está compuesto de un cuerpo en el que hay un depósito de productos, ventana de entrega de productos, dispositivo para la ejecución de la operación tecnológica, que incluye un sistema de transporte para el transporte de productos del depósito a la ventana de entrega de productos, un receptor de pago que incluye los dispositivos de recepción y de reintegro, y un sistema de control del aparato colocado en el mismo cuerpo y conectado con el receptor de pago y con el dispositivo para la ejecución de la operación tecnológica, y en el que el mismo cuerpo contiene el dispositivo de juego, conectado con el sistema de control del aparato.
ACTUADOR PARA LAS PIERNAS DE UN ROBOT CAMINANTE.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes Necesidades corrientes de la vida
(16/10/2003). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS. Clasificación: F16H21/18, B62D57/02, A63H31/08, A63H11/18.
Actuador para las piernas de un robot caminante. El actuador para las piernas de un robot caminante, en su mayor parte robots bípedos, con un elemento móvil, con un motor localizado en el elemento móvil, con un elemento base de la pierna el cual es conectado con el elemento móvil por medio de una articulación de rotación conectada cinemáticamente con el motor, distinguido en que el circuito cinemático entre el motor y el elemento base de la pierna tiene un mecanismo de biela-manivela y la manivela esta conectada cinemáticamente con el motor y la biela esta conectada con el elemento base de la pierna por medio una articulación de rotación, la longitud de la manivela es menor que la distancia entre las dos articulaciones de rotación en el elemento base de la pierna.
UN DISPOSITIVO DE UN ELEMENTO DE TRABAJO CON DOS GRADOS DE MOVILIDAD.
Sección de la CIP Técnicas industriales diversas y transportes
(01/07/2002). Solicitante/s: CONSEJO SUPERIOR INVESTIGACIONES CIENTIFICAS. Clasificación: B23Q1/48, B25J9/10, B23Q1/25.
Un dispositivo de un elemento de trabajo con dos grados de movilidad. Un elemento de trabajo con dos grados de movilidad, el cual, con la ayuda de dos motores consigue mover dos eslabones móviles, uno de ellos actuando sobre el elemento de trabajo, este es un método que se distingue por la acción simultanea sobre un elemento de trabajo con la ayuda de otro eslabón móvil. La conducción de un elemento de trabajo con dos grados de movilidad que tiene dos motores uno de los cuales esta ubicado en la base y conectado cinemáticamente con un extremo del primer eslabón móvil localizado en la base con posibilidad de movimiento y otro motor conectado cinemáticamente con un extremo del segundo eslabón móvil, y el elemento de trabajo que está conectado con el otro extremo del segundo eslabón móvil.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}