20 patentes, modelos y diseños de KUKA SCHWEISSANLAGEN GMBH
INSTALACION ATORNILLADORA AUTOMATICA Y PROCEDIMIENTO DE ENSAMBLE.
Sección de la CIP Técnicas industriales diversas y transportes
(16/12/2007). Ver ilustración. Inventor/es: ZACH,VITUS, ZIMMER,RUDOLF. Clasificación: B23P19/06, B62D65/02.
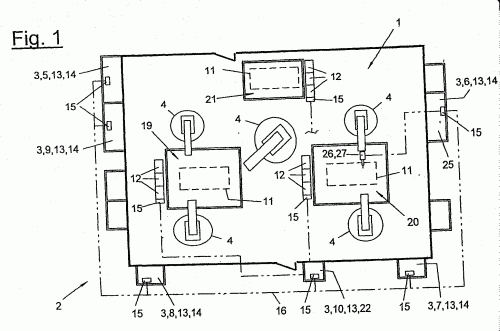
Instalación atornilladora automática para ensamblar piezas de montaje , especialmente carrocerías de vehículos, en una estación de atornillamiento , que consta de un soporte de base con varias herramientas de atornillamiento automáticas montadas en el mismo con posibilidad de ser movidas según varios ejes en el plano principal del soporte de base por medio de dispositivos de regulación, siendo regulables las herramientas de atornillamiento en su posición de una con relación a otra, caracterizada porque varias de las herramientas de atornillamiento están combinadas en al menos un grupo de atornilladores y están montadas conjuntamente en el soporte de base con posibilidad de ser movidas por medio de un dispositivo de regulación y son regulables con relación a las demás herramientas de atornillamiento.
Sección de la CIP Técnicas industriales diversas y transportes
(01/12/2006). Inventor/es: STURM, THOMAS. Clasificación: B23K37/04.
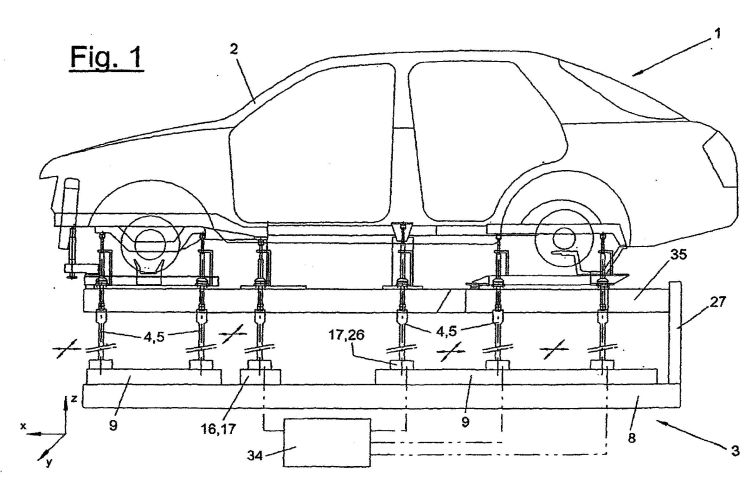
Instalación de sujeción para piezas estructurales , especialmente piezas estructurales de carrocerías, con un contorno de sujeción de pieza estructural, especialmente una pestaña de pieza estructural, caracterizada porque la instalación de sujeción presenta uno o varios aparatos de sujeción que poseen cada uno de ellos un armazón a manera de bastidor con varios pares - dispuestos en el mismo - de unidades de sujeción a manera de regletas fijas y móviles, adaptadas al trazado del contorno de sujeción de pieza estructural y dotadas de varios segmentos de sujeción , así como un dispositivo de ajuste que aproxima y sujeta la unidad o unidades de sujeción móviles al contorno de sujeción de pieza estructural.
INSTALACION Y PROCEDIMIENTO PARA EL MECANIZADO DE PIEZAS DE CARROZERIA, SINCRONIZANDO ROBOTS CON UNA CINTA TRANSPORTADORA.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(01/05/2006). Ver ilustración. Inventor/es: WIEDEMANN, GERHARD, GRIEGER, HELMUT, DRAKE, LARRY. Clasificación: G05B19/418, B25J9/00.
Procedimiento para el mecanizado, en particular para el ensamblaje de piezas de trabajo en la fabricación de carrocerías en bruto, en el que las piezas de trabajo son transportadas por un transportador a lo largo de una línea de transferencia y mecanizadas por varios robots de varios ejes dispuestos estacionarios sobre la línea de transferencia , caracterizado porque las piezas de trabajo son transportadas continuamente y mecanizadas por los robots durante el movimiento de transporte, estando los robots sincronizados en los movimientos de sus ejes con el movimiento de transporte y siendo el movimiento y la posición de las piezas de trabajo detectados con un sistema sensorial y transmitidos a un sistema de control , que controla el transportador y los robots.
PROCEDIMIENTO DE MANDO E INSTALACION INDUSTRIAL DE PRODUCCION CON UN SISTEMA DE MANDO WEB.
Sección de la CIP Física
(01/11/2004). Ver ilustración. Inventor/es: BIRKLE, FRITZ. Clasificación: G05B19/00.
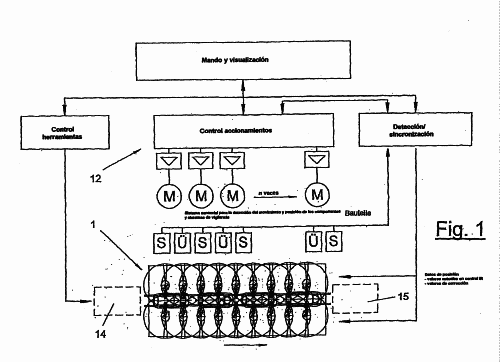
Procedimiento para el mando de una instalación industrial de producción, en especial para la fabricación de piezas de carrocerías de vehículos, formada por uno o varios componentes de aplicación inteligentes, en especial robots con varios ejes, dispositivos de soldadura, de encolado o de fijación o análogos y con al menos un mando de la instalación equipado con un servidor WEB y con al menos una página principal propia, según el estándar de Internet, caracterizado porque el mando de la instalación gobierna los componentes de aplicación inteligentes a través de un sistema de mando WEB y de una red de datos, al mismo tiempo, que los componentes de aplicación inteligente están equipados cada uno con un servidor WEB con al menos una página principal propia según el estándar de Internet.
DISPOSITIVO DE POSICIONAMIENTO PARA SOPORTES DE PIEZAS DE TRABAJO O PARA PIEZAS DE TRABAJO.
Sección de la CIP Técnicas industriales diversas y transportes
(01/07/2004). Ver ilustración. Inventor/es: FISCHER, WOLFGANG, STIMMEL, BURKHARD. Clasificación: B23K37/047, B23Q17/22, B25J9/16.
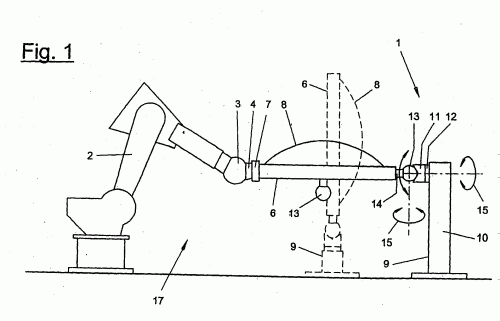
Procedimiento para el posicionamiento de soportes de piezas de trabajo o de piezas de trabajo , que son sostenidos y guiados por un manipulador multiaxial , en el cual está previsto al menos un dispositivo de soporte , en el cual se apoya el soporte de pieza de trabajo o la pieza de trabajo en uno o más ejes de forma que se pueda mover y que se pueda orientar en distintas posiciones.
PROCEDIMIENTO Y DISPOSITIVO PARA CALIBRAR ESTACIONES DE MEDICION CON ROBOTS, MANIPULADORES Y DISPOSITIVOS OPTICOS DE MEDICION ASOCIADOS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/11/2003). Ver ilustración. Inventor/es: ROOS, EBERHARD. Clasificación: B25J9/16.
Procedimiento para calibrar robots de medición de varios ejes y dispositivos ópticos de medición , que son desplazados junto con los robots, en especial sensores tridimensionales (3D), dentro de una estación de medición para piezas de trabajo , en especial para carrocerías en bruto de automóviles, caracterizado porque el calibrado se realiza en una secuencia de mediciones con por lo menos tres etapas de calibrado consecutivas entre sí, calibrándose en la primera etapa el dispositivo óptico de medición con su punto de trabajo , calibrándose a continuación el robot de medición con sus ejes con ayuda del dispositivo óptico de medición transportado junto con el robot, compensándose el error de posicionamiento mediante la corrección de los datos de la máquina del robot de medición y luego calibrándose la relación de correspondencia entre el robot de medición y la pieza de trabajo con ayuda del dispositivo óptico de medición transportado con el robot.
CONEXION ROTATIVA CON COMPONENTES MODULARES.
Sección de la CIP Electricidad
(16/01/2003). Inventor/es: KIKUT, BOTHO. Clasificación: H01R4/00.
Conexión rotativa para conectar una herramienta a la pinza de un robot, en donde la conexión rotativa presenta al menos una conexión eléctrica con dos placas de conexión situadas de forma que pueden girar una con respecto a otra, con escobillas y anillos colectores , caracterizada porque las escobillas están dispuestas en uno o varios componentes modulares que son posicionables en entalladuras preparadas de la correspondiente placa de conexión.
DISPOSITIVO PARA MANIPULAR AL MENOS UN BASTIDOR DE SUJECION, EN ESPECIAL PARA EL MONTAJE DE CARROCERIAS EN BRUTO DE VEHICULOS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/12/2002). Inventor/es: KIKUT, BOTHO, SEMMLINGER, WILFRIED, KRAUS, GERHARD, TAUCHEN, GUNTHER-EBERHARD. Clasificación: B62D65/00, B23K37/047.
Dispositivo para manipular uno o varios bastidores de sujeción para piezas constructivas , en especial carrocerías en bruto de vehículos, en una estación de mecanización con una línea de transferencia , poseyendo el dispositivo de manipulación una o varias bielas accionadas de forma giratoria, que por uno de sus extremos se han montado en al menos un carro que puede moverse mediante un motor a lo largo de, o con un ángulo respecto a, la línea de transferencia y que por su otro extremo muestran un dispositivo de retención para soportar el bastidor de sujeción.
Estación de trabajo flexible y procedimiento de servicio.
(16/05/2002) Procedimiento de servicio para una estación de trabajo flexible para elaborar, especialmente para unir y soldar geométricamente, dos o más tipos diferentes de elementos de construcción , presentando la estación de trabajo al menos un alimentador de elementos de construcción, al menos un puesto de elaboración flexible con varios dispositivos posicionadores móviles específicos para el tipo de pieza a elaborar con mecanismos de sujeción , uno o varios dispositivos de elaboración y al menos un dispositivo transportador , el cual con varios útiles de agarre recambiables, específicos para el tipo de pieza a elaborar, transporta los elementos de construcción desde el alimentador de elementos de construcción hasta los dispositivos posicionadores , caracterizado porque en el cambio de útiles los útiles de agarre son…
INSTALACION DE REBORDEAR CON ELEMENTOS DE APRIETE Y SUJECION.
Sección de la CIP Técnicas industriales diversas y transportes
(16/02/2002). Inventor/es: ZIMMER, ERNST. Clasificación: B21D39/02.
Instalación de rebordear con un dispositivo de rebordear exterior y/o un dispositivo de rebordear interior así como con un mecanismo de sujeción con elementos de apriete y sujeción, caracterizada porque el mecanismo de sujeción presenta uno o varios elementos de apriete y sujeción adelantados.
Sección de la CIP Técnicas industriales diversas y transportes
(16/12/2001). Inventor/es: KIKUT, BOTHO. Clasificación: B23Q1/00, B25J15/04.
Acoplamiento reversible para fijación liberable de herramientas en manipuladores , compuesta de dos piezas de acoplamiento y de un enclavamiento en unión positiva de forma, presentando el enclavamiento varios elementos de bloqueo móviles capaces de rodar, un cilindro asociado a la primera pieza del acoplamiento con pistón para accionar los elementos de bloqueo y las aberturas receptoras correspondientes en las piezas del acoplamiento, caracterizado porque las aberturas receptoras de la segunda pieza del acoplamiento están configuradas como canales de bolas esencialmente cilíndricos, que presentan un eje de canal, que discurre oblicuamente a las aberturas receptoras de la primera pieza del acoplamiento.
PROCEDIMIENTO Y DISPOSITIVO PARA MEDIR Y VERIFICAR PIEZAS.
Sección de la CIP Física
(16/11/2001). Ver ilustración. Inventor/es: MOLLER, MATTHIAS. Clasificación: G01S5/16, G01B11/00.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO Y A UN DISPOSITIVO PARA MEDIR Y CONTROLAR PIEZAS DE LA CARROCERIA DE AUTOMOVILES . LA MEDICION SE REALIZA CON UNA SONDA MEDIDORA , QUE TIENE UNA GALGA Y UNO O VARIOS INDICADORES DE POSICION . UN MANIPULADOR COLOCA LA SONDA MEDIDORA CON LA GALGA SOBRE UNO O VARIOS PUNTOS DE MEDICION DE LA PARTE DE LA CARROCERIA . A CONTINUACION SE MIDEN LOS INDICADORES DE POSICION POR PARTE DE UN SISTEMA EXTERIOR OPTICO RELACIONADO CON EL LUGAR, A FIN DE DETERMINAR LA POSICION. LA POSICION DE LOS PUNTOS DE MEDICION SE OBTIENE A PARTIR DE LOS DATOS DE MEDIDA. LA SONDA MEDIDORA MANTENIDA POR EL MANIPULADOR PUEDE DESVIARSE DE MANERA ELASTICA CON RELACION A UNO O VARIOS EJES.
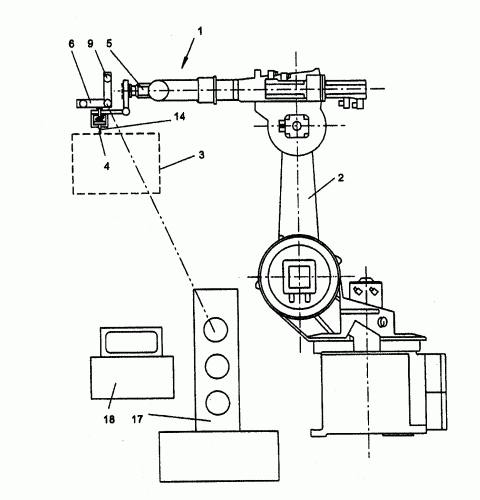
GUIA DE CONDUCCIONES PARA UN ROBOT INDUSTRIAL DE VARIOS EJES.
Sección de la CIP Técnicas industriales diversas y transportes
(16/11/2001). Inventor/es: WIEDEMANN, KURT, TRAPP, JOHANN. Clasificación: B25J19/00.
1. Disposición de conducciones para un robot industrial con varios ejes con una pluma y con una mano de robot, en la que las conducciones se disponen en un mazo y se sujetan con movimiento axial en un portaconducciones , al mismo tiempo, que las conducciones se prevén para el tendido a lo largo de la pluma hasta la mano del robot y que el portaconducciones posee un cojinete de giro para una disposición giratoria aproximadamente en la zona central de la pluma a una pequeña distancia de la carcasa de la pluma, caracterizada porque en las conducciones se prevén adicionalmente manguitos de manguera, que sobresalen a modo de collar.
Dispositivo de sujeción para piezas.
Sección de la CIP Técnicas industriales diversas y transportes
(01/11/2001). Inventor/es: STEINHART, WILHELM. Clasificación: B23Q3/18, B23K37/04, B25B5/00.
Dispositivo se sujeción para piezas , en especial piezas de carrocería, formado por uno o varios elementos de sujeción posicionables sobre una mesa de sujeción, al mismo tiempo, que los elementos de sujeción poseen varias piezas de elemento de sujeción, que se guían uno con relación a otro de forma desplazable en al menos un eje y que para el desplazamiento mutuo poseen un dispositivo de posicionado con un ajuste en altura y un dispositivo de fijación, caracterizado porque el ajuste en altura posee un ajuste aproximado y un ajuste fino, al mismo tiempo, que el ajuste aproximado posee un alojamiento con forma de trinquete y una espiga de apoyo en una pieza del elemento de sujeción y que el ajuste no posee un suplemento y eventualmente una o varias placas de ajuste y una fijación para el apoyo de la espiga de apoyo en la otra pieza del elemento de sujeción.
PROCESO Y DISPOSITIVO PARA LA FABRICACION DE PIEZAS COMPLEJAS.
Sección de la CIP Técnicas industriales diversas y transportes
(16/10/2001). Inventor/es: WIEDEMANN, GERHARD. Clasificación: B62D65/00, B23Q7/14, B23P21/00, B23Q41/02.
Se da a conocer un proceso y un dispositivo para la fabricación de piezas complejas, en particular carrocerías de automóviles, en una planta de fabricación en la que las piezas se transportan sucesivamente a lo largo de una línea de transferencia a través de varios puestos de trabajo donde se mecanizan. Las piezas se transportan entre los puestos de trabajo mediante unidades asistidas por robots que preferiblemente constan cada una de al menos dos robots de transferencia dispuestos a ambos lados de la línea de transferencia . Los robots de transferencia levantan las piezas en un movimiento sincronizado desde un puesto de trabajo ) al puesto de trabajo contiguo y la sitúan en él. Después del transporte de las piezas , las unidades de transporte pueden cambiar de herramienta y llevar a cabo otras operaciones de mecanización en las piezas.
DISPOSITIVO DE REBORDEADO.
Sección de la CIP Técnicas industriales diversas y transportes
(01/07/2000). Ver ilustración. Inventor/es: ZIMMER, ERNST. Clasificación: B21D39/02.
LA INVENCION ESTA RELACIONADA CON UN DISPOSITIVO DE REBORDEADO CON UNA CABEZA DE REBORDEADO QUE PRESENTA HERRAMIENTAS DE REBORDEADO DIVIDIDAS EN UNO O VARIOS SEGMENTOS (12 A 16) Y DOTADAS DE UN CANTO DE REBORDEADO CONTINUO EN POSICION DE FUNCIONAMIENTO. EL DISPOSITIVO DE REBORDEADO POSEE, ADEMAS, UN MECANISMO DE ACCIONAMIENTO DE ELEVACION PARA LA GENERACION DEL TRAZADO DE REBORDEADO Y UN DISPOSITIVO DE AJUSTE PARA LA ENTRADA Y SALIDA DE LOS SEGMENTOS (12 A 16), QUE POSEE UN MECANISMO DE ACCIONAMIENTO DE AJUSTE QUE MUEVE SIMULTANEAMENTE TODOS LOS SEGMENTOS (12 A 16). LOS SEGMENTOS POSEEN SUPERFICIES DE CONTACTO ADAPTADAS CON UN ANGULO ORTOGONAL (AL) DE 20(SUP,0) A 50(SUP,0). EL MECANISMO DE ACCIONAMIENTO DE AJUSTE SE CONFIGURA, PREFERENTEMENTE, COMO MECANISMO DE BIELA Y MANIVELA.
DISPOSITIVO PARA SOLDAR Y/O CORTAR.
Sección de la CIP Técnicas industriales diversas y transportes
(16/05/2000). Ver ilustración. Inventor/es: ENGLHARD, ANTON. Clasificación: B23K26/10.
LA INVENCION SE REFIERE A UN DISPOSITIVO DE SOLDADURA PARA SOLDAR Y/O CORTAR PIEZAS DE TRABAJO CON UNA CABEZA DE SOLDADURA , EN ESPECIAL UNA CABEZA LASER, DOTADA DE UN DISPOSITIVO DE GUIA Y DE AL MENOS UN RODILLO DE APRIETE . EL DISPOSITIVO DE GUIA SE PUEDE FIJAR POR MEDIO DE UN SOPORTE EN LA MANO DE UN OPERARIO. EL DISPOSITIVO DE GUIA PRESENTA UN MECANISMO DE REGULACION CON UNO O VARIOS EJES DE MOVIMIENTO DE TRASLACION Y/O ROTACION . POR MEDIO DE ESTE MECANISMO DE REGULACION SE PUEDE REGULAR LA CABEZA DE SOLDADURA CON RESPECTO A LA COSTURA , A LA DIRECCION DE MOVIMIENTO Y AL RODILLO DE APRIETE.
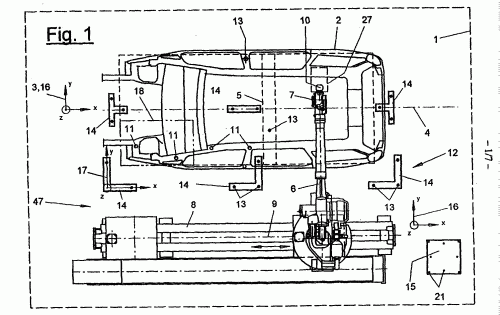
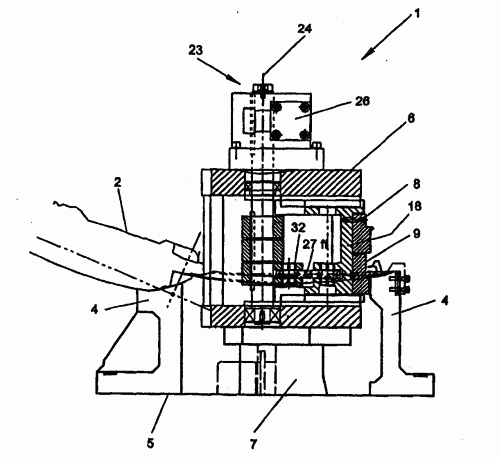
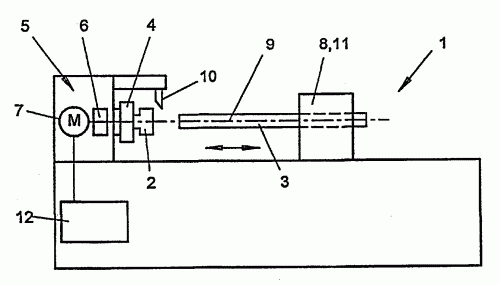
PROCEDIMIENTO Y DISPOSITIVO PARA LA SOLDADURA POR FRICCION DE PIEZAS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/02/2000). Ver ilustración. Inventor/es: MAZAC, KAREL, DR., BOCK, JOHANN, GROGER, WALTER. Clasificación: B23K20/12.
LA INVENCION CONSISTE EN UN PROCEDIMIENTO Y UN DISPOSITIVO PARA SOLDAR POR FRICCION PIEZAS CON MATERIALES O PROPIEDADES DIFERENTES, EN ESPECIAL DE DIFERENTE DUREZA Y/O TEMPERATURA DE FUSION. EN EL PROCESO DE FRICCION, LAS PIEZAS SE HACEN GIRAR EN SENTIDOS OPUESTOS A LO LARGO DE UN ANGULO DE ROTACION LIMITADO INFERIOR A 1.080 (GRADOS) , PREFERIBLEMENTE ENTRE 290 (GRADOS) Y 430 (GRADOS) . EL ANGULO DE GIRO SE CONTROLA MEDIANTE EL TIEMPO DE FRICCION Y LA DESCONEXION DEL ACCIONAMIENTO DE GIRO . LO MAS CONVENIENTE ES GIRAR LA PIEZA MAS RESISTENTE Y REFRENTAR SU CARA FRONTAL ANTES DE LA SOLDADURA POR FRICCION.
PROCEDIMIENTO Y DISPOSICION PARA LA SOLDADURA DE PIEZAS.
Sección de la CIP Técnicas industriales diversas y transportes
(16/02/1999). Inventor/es: MAZAC, KAREL, DR. Clasificación: B23K13/01, B23K13/08, B23K13/04.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO Y UNA DISPOSICION PARA LA SOLDADURA DE PIEZAS DE TRABAJO, EN PARTICULAR DE CHAPAS METALICAS. LAS PIEZAS SON CALENTADAS DE FORMA CONDUCTIVA O INDUCTIVA EN LOS BORDES A SER SOLDADOS POR MEDIO DE UNA CORRIENTE ALTERNA DE ALTA FRECUENCIA Y SON UNIDAS BAJO PRESION. DURANTE LA SOLDADURA, UN PROGRAMA DE REGULACION DE CORRIENTE PERMITE INTENSIDADES DE CORRIENTE DIFERENTES A SER APLICADAS A LAS PIEZAS DE TRABAJO EN DIFERENTES MOMENTOS DEL PROCESO. CUANDO COMIENZA EL RECALCADO, O JUSTAMENTE ANTES, LA CORRIENTE DE SOLDADURA SE INCREMENTA DE MANERA CORTA SOBRE LA CORRIENTE BASE, CON PREFERENCIA HASTA DOS O TRES VECES LA INTENSIDAD DE LA CORRIENTE BASE. PARA ESTE OBJETIVO, LA FUENTE DE CORRIENTE DISPONE DE UN CONTROL PROGRAMABLE CON UNA MEMORIA DE DATOS Y UN PROGRAMA DE REGULACION DE CORRIENTE.
PROCEDIMIENTO Y DISPOSITIVO PARA LA APORTACION, FIJACION Y MECANIZACION DE ELEMENTOS DE CONSTRUCCION DE UNA CARROCERIA PARA VEHICULOS.
Sección de la CIP Técnicas industriales diversas y transportes
(16/05/1998). Inventor/es: BACH, DIETER, THORWARTH, PAUL. Clasificación: B62D65/00, B23K37/04.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO Y UN APARATO PARA ALIMENTACION, SUJECION Y MECANIZADO DE PARTES DE UNA CARROCERIA DE UN VEHICULO EN UNA ESTACION DE TRABAJO. LAS PARTES SON ALIMENTADAS EN UNA O MULTIPLES ESTRUCTURAS DE SUJECION, QUE SON POSICIONADAS, INTERBLOQUEADAS Y SOPORTADAS MUTUAMENTE, FORMANDO UN ALOJAMIENTO DE ESTRUCTURA DE SUJECION QUE RODEA LAS PARTES EN AL MENOS CUATRO LADOS. LAS ESTRUCTURAS DE SUJECION TIENEN DISPOSITIVOS DE POSICIONAMIENTO DISEÑADAS PARA ESTE OBJETIVO Y FORMAN UNA CARCASA DE ESTRUCTURA DE SUJECION AUTOSOPORTADA QUE INCLUYE LA CARROCERIA DEL VEHICULO EN UNA ESTRUCTURA DE PERFIL CON PREFERENCIA ANULAR O CUBICA.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}