82 patentes, modelos y diseños de COMAU S.P.A. (pag. 2)
PROCEDIMIENTO Y DISPOSITIVO PARA SOLDADURA POR LASER REMOTO ASISTIDA POR ROBOT CON UN CONTROL SIMPLIFICADO DE LA DIRECCION DE FOCALIZACION DEL HAZ DE RAYO LASER.
(01/04/2008) Procedimiento de soldadura por láser de una estructura constituida por unos elementos de planchas de metal, en el cual: - un robot de manipulación de múltiples ejes está dispuesto incluyendo una pluralidad de motores eléctricos que controlan el movimiento de los elementos del robot alrededor de dichos ejes junto con una unidad de control electrónico programable para programar dichos motores eléctricos a fin de desplazar un elemento terminal del robot en cualquier posición, con cualquier orientación y en cualquier trayectoria en el interior de un volumen espacial determinado de tres dimensiones, - sobre dicho elemento terminal del robot de manipulación está montado un dispositivo accesorio para…
PROCEDIMIENTO Y DISPOSITIVO PARA SOLDADURA POR LASER.
(01/03/2008) Procedimiento para la soldadura por láser de una estructura compuesta de elementos de plancha de metal, en el que: - un robot manipulador está provisto de un número de ejes, el cual incluye una pluralidad de motores eléctricos, que controlan el movimiento de elementos constitutivos del robot alrededor de dichos ejes y una unidad de control electrónico programable para controlar dichos motores eléctricos con el propósito de desplazar un elemento constitutivo terminal del robot según cualquier posición, orientación y trayectoria en el interior de un primer espacio tridimensional previamente determinado; - dicho robot manipulador…
SISTEMA Y METODO PARA AJUSTAR Y FIJAR LA INCLINACION DE LAS GUIAS DE DESLIZAMIENTO DE UNA PUERTA-VENTANA LATERAL EN UN VEHICULO A MOTOR.
(16/12/2007) Puerta de vehículo a motor con un sistema para ajustar y fijar la inclinación de las guías de deslizamiento de un panel de vidrio, comprendiendo la puerta: - un armazón (20, 20'') que forma una pared (21, 21'') inferior sustancialmente horizontal con una ranura (22, 22'') sustancialmente transversal, - un par de guías de deslizamiento paralelas para un panel (P) de vidrio, en las que el pie de cada guía está integrado en una parte de placa orientada hacia dicha pared (21, 21'') inferior del armazón de la puerta y en las que la parte de placa soporta una tuerca roscada alineada con un orificio formado en dicha parte de placa, - un perno de fijación que tiene su espiga (36a) insertada a través de la ranura (22, 22'') y enganchada a la tuerca , disponiéndose…
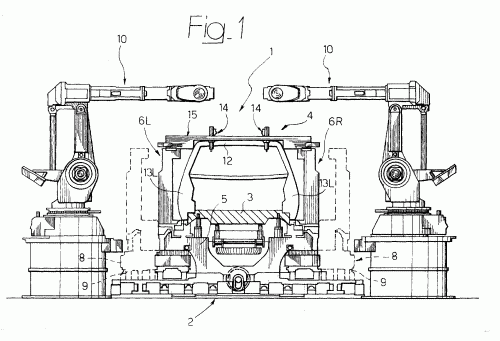
DISPOSITIVO DE ELEVACION DE CARGA.
(01/08/2007) Dispositivo de elevación que comprende: - una estructura inferior , - una estructura superior que se puede mover con respecto a la estructura inferior entre una posición descendida y una posición elevada, - una unión que conecta la estructura superior con la estructura inferior y que incluye por lo menos un brazo articulado , - un accionador interpuesto de forma que pueda funcionar entre la estructura inferior y la unión , para accionar el movimiento de la estructura superior entre su posición descendida y su posición elevada, - un elemento de conexión entre el accionador y la unión , estando articulado dicho elemento de conexión a dicho brazo de la unión y estando provisto de un elemento palpador de leva que coopera con una…
DISPOSITIVO PARA AJUSTAR UNA ARANDELA ELASTICA.
(01/07/2007) Dispositivo para ajustar una arandela elástica en una ranura circunferencial (G1) en la superficie de la cavidad interior de un artículo hueco (A), que comprende: un soporte para dicho artículo hueco (A), un elemento de guiado para montar en dicho artículo hueco (A), una vez que dicho artículo se haya dispuesto en dicho soporte , presentando dicho elemento de guiado una superficie de guiado interior estrechada hacia la cavidad interior de dicho artículo (A) en el estado montado mencionado anteriormente de dicho elemento de guiado y dicho artículo (A) en dicho soporte , una herramienta de inserción de arandela montada de manera que pueda deslizar axialmente a través de dicha superficie de guiado interior hacia dicho artículo (A) para empujar…
SISTEMA PARA SOLDAR CARROCERIAS DE VEHICULOS AUTOMOVILES.
(16/05/2007) Sistema para soldar estructuras constituidas por unos elementos de chapa metálica prensada, tal como carrocerías de vehículos automóviles o sus subconjuntos, diseñado para funcionar de forma automática en una pluralidad de diferentes tipos de estructura que se va a soldar, del tipo que comprende. - una estación de soldadura ; - una línea de transporte , para transportar las estructuras que se van a soldar a través de la estación de soldadura o al menos parte de ella; - una pluralidad de pares de compuertas laterales (3a, 3b, 3c, 3d) provistas de unos medios para fijar las estructuras que se van a soldar y capaces de ser guiadas a lo largo de la línea de transporte , estando adaptados los medios de fijación previstos en las compuertas laterales (3a, 3b, 3c, 3d) de cada par a…
SISTEMA PARA PROGRAMAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, QUE COMPRENDE UN TERMINAL DE PROGRAMACION PORTATIL.
(16/05/2007) Sistema de programación para un robot, o un aparato automático similar, que contiene una herramienta , comprendiendo el sistema una unidad de control , operativa para controlar los movimientos del robot según varios ejes, y un terminal de programación portátil , que está conectado funcionalmente a la unidad de control , y comprendiendo el terminal : - unos medios de selección , que pueden ser accionados manualmente para seleccionar el sistema de coordenadas deseado de una pluralidad de sistemas de coordenadas ("Base", "Herramienta" y "Articulaciones") almacenados en la unidad de control ; - unos primeros medios de control de movimiento, cuyo funcionamiento…
PROCEDIMIENTO E INSTALACION PARA ENGASTAR CHAPAS DE METAL.
Sección de la CIP Técnicas industriales diversas y transportes
(01/03/2007). Ver ilustración. Inventor/es: WESTALL, ROGER. Clasificación: B21D39/02.
Procedimiento para engastar chapas de metal, que comprende las siguientes etapas: - colocar dos chapas de metal (6a, 6b) en una estación de engastado que comprende una matriz de engaste , comprendiendo dichas dos chapas de metal (6a, 6b) por lo menos una zona en su borde donde se aplica una resina curable en caliente, - realizar una operación de engastado a lo largo del borde de dichas chapas (6a, 6b), y - polimerizar la resina al calentar el borde engastado , caracterizado porque el procedimiento comprende las siguientes operaciones: - elevar las chapas de metal (6a, 6b) de la matriz de engaste al final de la operación de engastado, y - realizar una operación de calentamiento por inducción en la misma estación de engastado mediante un dispositivo de calentamiento por inducción que lleva a cabo un calentamiento localizado de los bordes engastados cuando las dos chapas de metal se encuentran en posición elevada con respecto a la matriz de engaste.
CONJUNTO PARA SUJETAR PIEZAS DE TRABAJO.
(16/07/2006) Equipo que puede ser utilizado por un robot industrial para sujetar piezas o conjuntos que se están procesando o ensamblando, que comprende una estructura reticular modular , definida por una pluralidad de módulos , conectados entre sí mediante unas conexiones de tornillo , y una pluralidad de elementos de referencia o elementos de posicionamiento (P) unidos a dicha estructura reticular modular mediante unas estructuras reticulares modulares auxiliares respectivas, en el que cada una de dichas estructuras auxiliares comprende un número de barras y un número de bloques de interconexión , así como uno o más dispositivos…
PROCEDIMIENTO Y DISPOSITIVO PARA SOLDAR CON LASER DOS O MAS CHAPAS METALICAS SUPERPUESTAS Y PARA PINZAR LAS CHAPAS.
(16/07/2006) Procedimiento para soldar con láser dos chapas metálicas , superpuestas entre sí, en el que por lo menos una de las chapas presenta una capa de protección en la superficie que está en contacto con la otra chapa, estando dicha capa de protección formada con un material que presenta una temperatura de vaporización inferior a la temperatura de fusión del material que forma la chapa, en el que las chapas a soldar están pinzados en una posición fija en relación entre sí durante la operación de soldadura mediante la utilización de unos medios de pinzado , en el que la soldadura se lleva a cabo sujetando las chapas (1a, 2a) ligeramente separadas entre si en la zona de soldadura, de modo que los vapores del material de protección, que se crean…
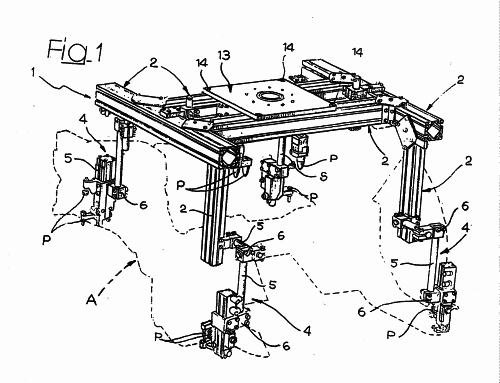
CONJUNTO PARA SUJETAR PIEZAS DE TRABAJO.
Sección de la CIP Técnicas industriales diversas y transportes
(16/05/2006). Ver ilustración. Inventor/es: GROSSO, CLEMENTE. Clasificación: B25J15/00, B23Q7/04, B23Q3/18, B23Q3/10, B23Q37/00, B25B5/00.
Equipo que puede ser utilizado por un robot industrial para sujetar piezas o conjuntos que se están procesando o ensamblando, que comprende una estructura reticular modular , definida por una pluralidad de módulos , conectados entre sí mediante unas conexiones de tornillo , cada uno de los cuales está compuesto por un elemento seccional metálico, provisto de al menos una cavidad longitudinal proyectada hacia una superficie externa del elemento seccional mediante una hendidura longitudinal de una anchura menor que la de la cavidad , caracterizado porque a lo largo de cada una de dichas hendiduras , en intervalos de una longitud (L) predeterminada fija, se obtienen unos pares de muescas opuestas en los lados encarados de la hendidura , para acoplar unos cojinetes de guiado para unos tornillos de conexión para conectar los módulos de la estructura.
DISPOSITIVO PARA CARGAR Y DESCARGAR HERRAMIENTAS EN/DEL ALMACEN PARA HERRAMIENTAS DE UNA MAQUINA HERRAMIENTA O SIMILAR.
(16/03/2006) Dispositivo para la carga y descarga de herramientas en/del almacén para herramientas de una máquina herramienta o similar, caracterizado porque comprende: - una pared de protección que separa el almacén para herramientas de una zona exterior protegida; - una puerta provista en dicha pared de protección para el acceso al almacén de herramientas ; - una corredera de apoyo para herramienta provista de un soporte de apoyo para herramienta diseñado para recibir una herramienta que se va a cargar en el almacén o que se va a descargar del almacén, estando dicha corredera montada de manera que se pueda deslizar sobre una estructura de soporte en la parte exterior de la pared de protección entre…
MAQUINA HERRAMIENTA MANDRINADORA HORIZONTAL.
(16/10/2005) Máquina mandrinadora horizontal para mandrinar superficies cilíndricas provistas de ejes horizontales y separadas axialmente entre sí, tales como los asientos para un cigüeñal de un motor en la caja de cigüeñal de un motor de combustión interna, que comprende: - una barra de mandrinar accionada en su giro por un portaherramientas y provista por lo menos de un elemento de corte (P1), unos medios de accionamiento para accionar el giro de dicho portaherramientas , unos medios para desplazar axialmente el grupo compuesto por el portaherramientas y los medios de accionamiento asociados , una contrabarra acoplada en su giro cabeza con cabeza con dicha barra…
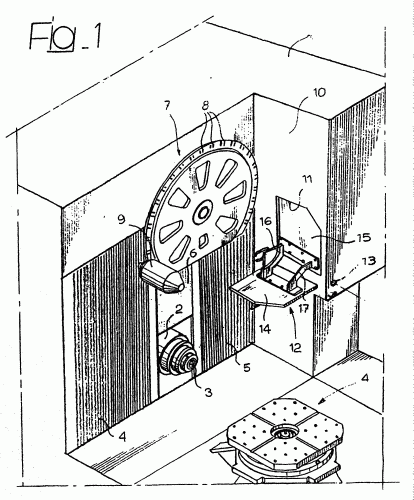
DISPOSITIVO PARA CARGAR Y DESCARGAR HERRAMIENTAS EN/DESDE EL COMPARTIMIENTO DE HERRAMIENTAS DE UNA MAQUINA HERRAMIENTA.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes
(01/03/2005). Ver ilustración. Inventor/es: MENZIO, DANILO. Clasificación: F16P3/08, B23Q11/08, B23Q3/155, F16P3/02.
Dispositivo para cargar y descargar herramientas en/desde el compartimiento de herramientas de una máquina herramienta, en el que dicha máquina herramienta comprende: - un soporte para la pieza que se somete a mecanizado; - un cabezal de mecanizado que lleva un husillo giratorio al que se conecta en rotación una herramienta, siendo desplazable dicho cabezal de mecanizado en tres direcciones perpendiculares entre sí con respecto a una estructura fija de la máquina herramienta; - un compartimiento de herramientas que comprende una pluralidad de asientos diseñados para recibir y soportar las respectivas herramientas ; y - al menos una pared de protección que separa el área de trabajo del cabezal de mecanizado de un área externa protegida.
PROCEDIMIENTO Y SISTEMA PARA LA DETERMINACION AUTOMATICA DE UN PROGRAMA DE MOVIMIENTO OPTIMO DE UN ROBOT.
(16/05/2003) Procedimiento para optimizar automáticamente el programa de movimiento de un robot que comprende por lo menos un miembro movible, unos medios de motor asociados a dicho miembro movible y unos medios de control capaces de activar dichos medios de motor según dicho programa de movimiento para mover dicho miembro movible a lo largo de una trayectoria en dependencia de un parámetro predeterminado del movimiento, caracterizado el procedimiento porque comprende las siguientes etapas: - adquisición de datos que indican tanto el estado de carga de dichos medios de motor como la precisión de movimiento del robot durante la ejecución de dicho programa de movimiento, - comparación de dichos datos sobre dicho estado de carga y sobre dicha precisión del movimiento con unos…
DISPOSITIVO PARA MONTAR CARROCERÍAS DE VEHÍCULOS A MOTOR O SUBCONJUNTOS DE LOS MISMOS, TENIENDO UN SISTEMA DE DETECCIÓN DE DEFORMACIÓN INTEGRADO, Y UN PROCEDIMIENTO DE ENSAMBLADO HACIENDO USO DE ESTE DISPOSITIVO.
Sección de la CIP Técnicas industriales diversas y transportes
(16/05/2001). Inventor/es: BOSSOTTO, PIERO, CHIORINO, LUIGI, BICKERSTAFF, DAVID J. Clasificación: B23K37/047.
Una estación para ensamblar carrocerías de vehículos a motor o subconjuntos de las mismas, que comprende un sistema integrado (S) para detectar microdeflexiones de las puertas de localización laterales que se acoplan a la carrocería durante la operación de ensamblado, con la posibilidad resultante de calcular las fuerzas a lo largo de una dirección transversal a la dirección longitudinal de la estación de ensamblado, a la cual está sujeta la estructura ensamblada.
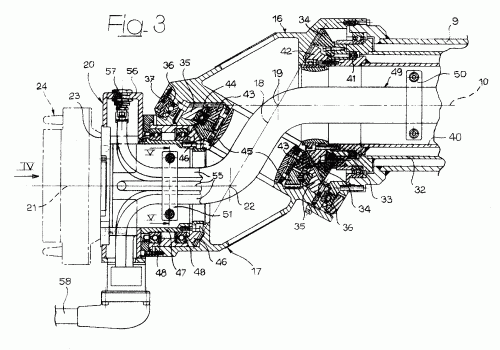
Sección de la CIP Técnicas industriales diversas y transportes
(01/02/2001). Ver ilustración. Inventor/es: FIORA, ALDO. Clasificación: B25J19/00, B25J17/02, B25J15/04.
LA INVENCION SE REFIERE A UNA ARTICULACION PARA UN ROBOT INDUSTRIAL QUE COMPRENDE TRES ELEMENTOS SUSTENTADOS GIRATORIAMENTE EN TORNO A EJES DE ROTACION RESPECTIVOS , COPLANARES E INCLINADOS MUTUAMENTE, QUE DEJAN UN ESPACIO LIBRE EN SU INTERIOR PARA EL PASO DE CABLES DE ALIMENTACION QUE HAN DE CONECTARSE A LA HERRAMIENTA FIJADA A LA ARTICULACION ROBOTICA. ESTA ULTIMA TIENE UNA BRIDA FRONTAL PARA ACOPLAR LA HERRAMIENTA Y VARIAS SALIDAS RADIALES PARA LOS CITADOS CABLES DE ALIMENTACION , A FIN DE PERMITIR EL USO DE UNA BRIDA DE ACOPLAMIENTO DE HERRAMIENTAS DE ESTRUCTURA SIMPLIFICADA.
DISPOSITIVO PARA LA SOLDADURA POR PUNTOS DE CARROCERIAS DE VEHICULOS AUTOMOVILES O SUBCONJUNTOS DE LAS MISMAS.
Sección de la CIP Técnicas industriales diversas y transportes
(16/08/1999). Ver ilustración. Inventor/es: ALBORANTE, GIANCARLO. Clasificación: B23K37/047.
UNA ESTACION DE SOLDADURA, PARA SOLDAR POR EJEMPLO CARROCERIAS DE VEHICULOS DE MOTOR, QUE SOLO RECIBE UNA PARTE DE LA ESTRUCTURA A SOLDAR PROCEDENTE DE UNA LINEA DE TRANSPORTE, MONTANDOSE EL RESTO DE LOS COMPONENTES DE LA ESTRUCTURA A DICHA PARTE EN LA ESTACION DE SOLDADURA MISMA, MEDIANTE DOS COMPUERTAS DE POSICIONAMIENTO QUE RECIBEN DICHOS COMPONENTES PROCEDENTES DE UNOS ROBOTS DE MANIPULACION , CUYOS ROBOTS TAMBIEN REALIZAN LA SOLDADURA POR PUNTOS DE LA ESTRUCTURA UNA VEZ QUE ESTA HA QUEDADO MONTADA Y ENCLAVADA EN UNA POSICION DE SOLDADURA CORRECTA POR PARTE DE DICHAS COMPUERTAS DE POSICIONAMIENTO . LAS COMPUERTAS DE POSICIONAMIENTO TIENEN UNOS TOLES INFERIORES AUTOPROPULSADOS GUIADOS SOBRE UNOS RIELES, DE MODO QUE SE PUEDAN INTERCAMBIAR RAPIDAMENTE CON OTRO PAR DE COMPUERTAS DE POSICIONAMIENTO ADAPTADAS A UN TIPO DE CARROCERIA DIFERENTE.
SISTEMA PARA RECOGER VEHICULOS, ESPECIALMENTE EN GARAJES EN FORMA DE TORRE.
Sección de la CIP Construcciones fijas
(01/02/1999). Inventor/es: BOZZI, EUGENIO LUIGI. Clasificación: E04H6/18.
SE PRESENTA UN SISTEMA PARA RECOGER VEHICULOS EN GARAJES DE TORRE QUE COMPRENDE UNA ESTRUCTURA HORIZONTALMENTE MOVIL QUE SOPORTA DOS PARES DE MORDAZAS SOBRE CADA UNO DE SUS LADOS OPUESTOS. DICHAS MORDAZAS PUEDEN SER ACCIONADAS CON UN MOVIMIENTO TRASLACIONAL, ROTATORIO EN EL PLANO DE LA ARMADURA , DE MANERA QUE SALGAN FUERA DE LA ARMADURA Y SE TRASLADEN DE FORMA PARALELA CON DICHOS LADOS, LA ARMADURA ESTA CONFORMADA DE MANERA QUE PUEDA POSICIONARSE POR DEBAJO DE CUALQUIER VEHICULO Y ENTRE LAS RUEDAS DEL MISMO SIRVIENDO LAS MORDAZAS PARA AGARRAR LAS RUEDAS DEL VEHICULO.
DISPOSITIVO PARA SOLDADURA EN OBRA DE ESTRUCTURAS CONSTITUIDAS POR ELEMENTOS METALICOS LAMINADOS, ESPECIALMENTE CUERPOS DE VEHICULOS DE MOTOR.
Sección de la CIP Técnicas industriales diversas y transportes
(01/04/1998). Inventor/es: ZAMPINI, ANTONIO. Clasificación: B62D65/00, B23K37/047.
EN UN DISPOSITIVO DE SOLDADURA PARA CUERPOS DE VEHICULOS DE MOTOR, SE DISPONE DE UN MEDIO DE PARES DE PUERTAS DE SITUACION , ADAPTADAS PARA ACTUAR SOBRE DIFERENTES MODELOS DEL CUERPO. EN LA POSICION DE TRABAJO, CADA PAR DE PUERTAS DE POSICION PUEDE ACOPLARSE SELECTIVAMENTE A UNA PLURALIDAD DE DISPOSITIVOS AUXILIARES (4A, 4B, 4C; 5A, 5B, 5C), SEGUN LA VERSION ESPECIFICA (POR EJEMPLO, PARTE POSTERIOR DE PORTEZUELA, SEDAN, MICROBUS), DEL MODELO DEL CUERPO QUE SE VA A SOLDAR.
SISTEMA DE INSPECCION PARA CONTROLAR LA COLOCACION DE UNA CUERDA O CAPA DE UN MATERIAL FLUORESCENTE SOBRE UNA PIEZA METALICA.
Sección de la CIP Física
(16/01/1998). Inventor/es: BONGI, ADOLFO. Clasificación: G01N21/64.
UN SISTEMA OPTICO DE INSPECCION PARA CONTROLAR LA COLOCACION DE UNA CUERDA O CAPA DE MATERIAL FLUORESCENTE SOBRE UNA PIEZA METALICA QUE CONSTA DE UNA ESTACION DE INSPECCION OPTICA QUE INCLUYE UNOS ELEMENTOS DE PARED QUE SE PUEDEN MOVER ENTRE UNA POSICION DE ABIERTOS Y UNA POSICION DE CERRADOS EN QUE DICHOS ELEMENTOS DEFINEN UNA CAMARA OSCURA EN DONDE QUEDA CONFINADA LA PIEZA A CONTROLAR. A DICHOS ELEMENTOS DE PARED HAY ASOCIADAS UNAS LAMPARAS DE WOOD QUE ILUMINAN LA PIEZA LO QUE ASEGURA LA CAMARA DE VIDEO LLEVA A CABO UNA INSPECCION OPTIMA.
ROBOT INDUSTRIAL, PARTICULARMENTE PARA MOVER PIEZAS DE UNA PRENSA A OTRA, EN UNA LINEA DE PRENSAS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/01/1998). Inventor/es: MAULETTI, ENRICO. Clasificación: B25J9/10, B21D43/10.
UN ROBOT INDUSTRIAL, ESPECIALMENTE PARA USO COMO UN ROBOT ENTRE PRENSAS, COMPRENDE UN PAR DE BRAZOS ROTATORIOS, ALREDEDOR DE DOS EJES (I, II), PARALELOS ENTRE SI, Y ESPACIADOS UNO DE OTRO, SOBRE LOS CUALES SE ARTICULAN DOS ANTEBRAZOS . LOS EXTREMOS OPUESTOS DE LOS ANTEBRAZOS ESTAN MUTUAMENTE ARTICULADOS ALREDEDOR DE UN EJE COMUN , Y UNO DE ESTOS ANTEBRAZOS SOPORTA ROTATORIAMENTE UN MUÑON ALREDEDOR DE UN TERCER EJE (III) PARALELO A LOS CITADOS EJES PRIMERO Y SEGUNDO (I, II).
DISPOSITIVO PARA SOLDAR EN EL ACTO ESTRUCTURAS FORMADAS DE ELEMENTOS DE METAL DE LAMINA PRENSADA.
Sección de la CIP Técnicas industriales diversas y transportes
(16/10/1997). Inventor/es: ROSSI, CRISTIANO. Clasificación: B23K37/047.
EN UNA ESTACION DE SOLDADO , PARTICULARMENTE PARA CUERPOS DE VEHICULOS DE MOTOR, LOS ELEMENTOS QUE SE VAN A SOLDAR ESTAN CERRADOS EN UNA POSICION PRECISA MEDIANTE DISPOSITIVOS TRANSPORTADOS A TRAVES DE PUERTAS DE LOCALIZACION . SE PROVEE UN NUMERO DE PARES DE PUERTAS DE LOCALIZACION , CORRESPONDIENTES AL NUMERO DE DIFERENTES TIPOS DE ESTRUCTURAS QUE VAN A SER SOLDADAS SOBRE LA ESTACION QUE DEBE FUNCIONAR. LAS PUERTAS ESTAN MONTADAS SOBRE TRANSPORTADORES MECANICOS QUE ESTAN GUIADOS LONGITUDINALMENTE SOBRE AMBAS CARAS DE LA LINEA TRANSPORTADORA PARA PERMITIR AL PAR DE PUERTAS QUE ESTAN EN LA POSICION OPERATIVA SER RAPIDAMENTE INTERCAMBIADAS. LOS ELEMENTOS DE LA ESTRUCTURA QUE VAN A SER SOLDADOS ALCANZAN EL AREA DE TRABAJO SUSPENDIDOS A UN GANCHO , SIN SER ANTERIORMENTE CONECTADOS UNOS A OTROS.
ROBOT INDUSTRIAL CON UNIDADES DE ENGRANAJE REDUCTOR INTEGRADAS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/07/1997). Inventor/es: MAULETTI, ENRICO. Clasificación: B25J19/00, B25J9/10, B25J17/02, B25J9/04.
SE PROPORCIONA UN ROBOT INDUSTRIAL CON UNA PLURALIDAD DE ELEMENTOS ARTICULADOS UNOS A OTROS, CUYA ROTACION SE ACCIONA POR RESPECTIVOS MOTORES ELECTRICOS MEDIANTE UNIDADES DE ENGRANAJES REDUCTORES, QUE ESTAN INTEGRADAS EN LA ESTRUCTURA DE ESTOS ELEMENTOS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/05/1997). Inventor/es: MAULETTI, ENRICO. Clasificación: B25J9/10, B25J9/04.
SE DESCRIBE UN ROBOT INDUSTRIAL CON NUEVA CONFIGURACION, INCLUYENDO UN BRAZO ROTATORIAMENTE MONTADO ALREDEDOR DE UN PRIMER EJE VERTICAL, SOBRE UN CUERPO FIJO , UN SEGUNDO CUERPO ROTATORIAMENTE MONTADO ALREDEDOR DE UN SEGUNDO EJE VERTICAL, POR DEBAJO DEL CITADO BRAZO , UNA ARTICULACION EN FORMA DE PARALELOGRAMO, ROTATORIAMENTE MONTADA ALREDEDOR DE UN TERCER EJE HORIZONTAL, SOBRE EL SEGUNDO CUERPO , Y UN MUÑON LLEVADO POR LA ARTICULACION EN FORMA DE PARALELOGRAMO, Y ARTICULADA ALREDEDOR DE DOS EJES MUTUAMENTE ORTOGONALES.
UN DISPOSITIVO PARA SOPORTAR Y MOVER UNA CABEZA PARA ENFOCAR UN RAYO LASER.
Sección de la CIP Técnicas industriales diversas y transportes
(16/10/1996). Inventor/es: MARINONI, GIORGIO, MACCAGNO, ALBERT. Clasificación: B23K26/08.
SE SOPORTA EL CABEZAL PARA ENFOCAR UN RAYO LASER MEDIANTE UN DISPOSITIVO QUE, EN PRINCIPIO, CORRESPONDE A UN SISTEMA DE CIGUEÑAL Y DE BIELA DE FORMA QUE DICHO CABEZAL PUEDA REALIZAR MOVIMIENTOS CIRCULARES MIENTRAS QUE EL EJE SE MANTIENE PARALELO AL MISMO.
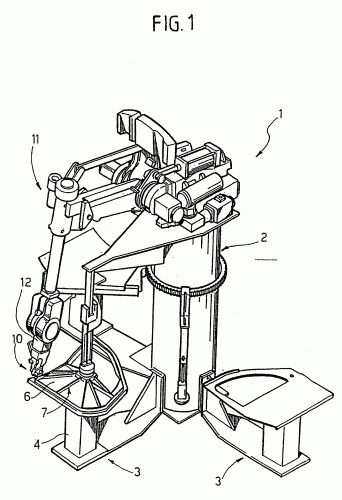
UNIDAD DE PRODUCCION DE ALTA VELOCIDAD PARA LLEVAR A CABO OPERACIONES DE MAQUINADO Y QUE INCLUYE UN DEPOSITO ALIMENTADOR DE HERRAMIENTAS DINAMICO.
Sección de la CIP Técnicas industriales diversas y transportes
(01/10/1996). Inventor/es: SCARZELLO, OSVALDO. Clasificación: B23Q3/157, B23Q3/155.
UNA UNIDAD DE PRODUCCION DE ALTA VELOCIDAD PARA LLEVAR A CABO OPERACIONES DE MAQUINADO Y QUE CONSTA DE UN PRIMER CARRO HORIZONTAL , UN SECUNDO CARRO QUE SE PUEDE DESLIZAR HORIZONTALMENTE A LO LARGO DE UNA DIRECCION ORTOGONAL RESPECTO A LA DIRECCION DE DESLIZAMIENTO DEL PRIMER CARRO Y UN TERCER CARRO QUE SE DESLIZA VERTICALMENTE QUE LLEVA UN CABEZAL GIRATORIO . ADEMAS DE UN DEPOSITO ALIMENTADOR DE HERRAMIENTAS ESTATICO , LA UNIDAD TIENE UN DEPOSITO ALIMENTADOR DE HERRAMIENTAS DINAMICO QUE SE PUEDE DESPLAZAR ENTRE UNA POSICION OPERATIVA ADYACENTE AL AREA DE TRABAJO DEL CABEZAL ROTATIVO Y UNA POSICION INACTIVA SEPARADA DE DICHA AREA DE TRABAJO PARA PODER SUSTITUIR LAS HERRAMIENTAS ROTAS O DESGASTADAS SON PERDIDA DEL TIEMPO DEL CICLO.
EQUIPO Y METODO PARA CONTROLAR EL FUNCIONAMIENTO DE MAQUINAS SUPERPUESTAS , SOBRE TODO PRENSAS.
Sección de la CIP Física
(01/07/1996). Inventor/es: DEPLANO, STEFANO. Clasificación: G05B19/04.
EN UNA SERIE DE PRENSAS SUPERPUESTAS (P1-P7), UNA SERIE DE ROBOTS MANIPULADORES PROGRAMABLES (R1-R6) INTERPUESTOS ENTRE LAS PRENSAS (P1-P7) SON LOS QUE LLEVAN LAS PIEZAS DE UNA PRENSA A OTRA. LOS CICLOS DE FUNCIONAMIENTO DE LOS ROBOTS MANIPULADORES SE SINCRONIZAN CON LOS DE LAS PRENSAS EN BASE A LA FRECUENCIA CON QUE FUNCIONA LA PRIMERA PRENSA (P1) A LA ENTRADA DE LA SUPERPOSICION, DERIVANDOSE ENTRE SI LOS CICLOS DE FUNCIONAMIENTO DE LAS DIFERENTES MAQUINAS SUPERPUESTAS EN UN PROCESO EN SERIE QUE COMIENZA EN LA FRECUENCIA DE FUNCIONAMIENTO BASICO.
Sección de la CIP Técnicas industriales diversas y transportes
(16/03/1996). Inventor/es: ZONA, MAURO, BETTINARDI, MARCO. Clasificación: B25J19/00, B25J17/02, B25J9/08.
EL ARMAZON DE UN BRAZO DE UN ROBOT ARTICULADO TIENE UNA ESTRUCTURA EN FORMA CONCHIFERA, LA CUAL DESEMPEÑA UNA FUNCION DE CARGA Y ALOJA UN MODULO CONTENIENDO LA UNIDAD MOTOR Y TRANSMISION AFIN.
UNIDAD Y METODO PARA SUMINISTRAR PIEZAS SEMIFINALIZADAS A UNA MAQUINA CONFORMADORA, PARTICULARMENTE UNA PRENSA.
Sección de la CIP Técnicas industriales diversas y transportes
(01/01/1996). Inventor/es: MARINONI, GIORGIO, BARONCELLI, ARTURO. Clasificación: B65G61/00, B21D43/24.
SE PRESENTA UNA UNIDAD DE SUMINISTRO DE PIEZAS SEMIFINALIZADAS QUE TIENE UN SOPORTE DE INDEXACION PARA TRANSFERIR UNA PILA DE PIEZAS SEMIFINALIZADAS DESDE UNA ESTACION DE CARGA HASTA UNA ESTACION DE RECOGIDA; UN ROBOT PARA TRANSFERIR UNA PIEZA CADA VEZ DESDE LA ESTACION DE RECOGIDA HASTA UNA PRENSA ; UN DISPOSITIVO DE DETECCION PARA DETECTAR LAS CARACTERISTICAS Y LA POSICION ASUMIDA POR LA PILA DE PIEZAS EN LA ESTACION DE RECOGIDA; Y UN SISTEMA DE CONTROL Y PROCESAMIENTO PARA GENERAR SEÑALES DE CONTROL PARA EL ROBOT EN RESPUESTA A LAS SEÑALES DE ENTRADA DEL DISPOSITIVO DE DETECCION.
MUÑECA MECANICA PARA UN ROBOT.
Sección de la CIP Técnicas industriales diversas y transportes
(01/11/1995). Inventor/es: ZONA, MAURO, BETTINARDI, MARCO. Clasificación: B25J17/02.
SE PRESENTA UNA MUÑECA PARA UN ROBOT ARTICULADO QUE TIENE UN MIEMBRO OPERATIVO QUE PUEDE GIRAR ALREDEDOR DE TRES EJES MUTUAMENTE PERPENDICULARES Y TRES UNIDADES MOTORIZADAS CADA UNA DE LAS CUALES PUEDE HACER GIRAR AL MIEMBRO OPERATIVO ALREDEDOR DE SOLAMENTE UNO DE LOS TRES EJES SIN PROVOCAR NINGUNA ROTACION ALREDEDOR DE LOS OTROS EJES.
ROBOT ARTICULADO CON DOS ANTEBRAZOS.
Sección de la CIP Técnicas industriales diversas y transportes
(16/06/1995). Inventor/es: ZONA, MAURO, BETTINARDI, MARCO. Clasificación: B25J9/00, B25J9/04, B25J18/02.
UN ROBOT ARTICULADO TIENE UN BRAZO Y DOS ANTEBRAZOS , LOS CUALES ESTAN ARTICULADOS AL BRAZO ALREDEDOR DEL MISMO EJE Y CONTROLADOS POR MEDIOS DE CONDUCCION INDEPENDIENTES.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}