CIP-2021 : G05B 19/08 : que utilizan tableros de conexión, de distribuidores de barras cruzadas, de conmutadores de matriz, o análogos.
CIP-2021 › G › G05 › G05B › G05B 19/00 › G05B 19/08[3] › que utilizan tableros de conexión, de distribuidores de barras cruzadas, de conmutadores de matriz, o análogos.
G FISICA.
G05 CONTROL; REGULACION.
G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K).
G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00).
G05B 19/08 · · · que utilizan tableros de conexión, de distribuidores de barras cruzadas, de conmutadores de matriz, o análogos.
CIP2021: Invenciones publicadas en esta sección.
DISPOSITIVO PARA LA MANIPULACION O TRANSFORMACION DE ELEMENTOS O SUBCONJUNTOS INDUSTRIALES.
(01/01/2004) 1. Dispositivo para la manipulación o transformación de elementos o subconjuntos industriales, de forma automática, caracterizado esencialmente por el hecho de consistir en un mecanismo que permite el desplazamiento de un sistema de estructura dispuesto en el sentido de los ejes cartesianos (XY), accionados mediante dos elementos motores, controlados de forma automática mediante un conjunto electrónico, y acoplados a una única transmisión de poleas, dispuesto todo ello de manera que la estructura correspondiente al eje horizontal de las abscisas (X) se desplazará tanto en sentido horizontal como en sentido vertical, mientras la otra estructura, la correspondiente…
METODO DE CONTROL DEL POSICIONAMIENTO DE PARADA Y DE LA POSICION DE AGUJAS Y ALIMENTADORES DE UNA MAQUINA TRICOTOSA CIRCULAR.
(16/08/2001). Solicitante/s: PAI LUNG MACHINERY MILL CO., LTD.. Inventor/es: WANG,PING-SHIN.
Método de control del posicionamiento de parada y de la posición de agujas y alimentadores de una máquina tricotosa circular, en el que se obtienen dos señales de 90º de diferencia de fases de un codificador 14 y después se tratan a través de un generador de impulsos 2 para controlar el posicionamiento de rotación directa/inversa del cilindro de agujas 1; la señal para controlar el posicionamiento de la rotación directa/inversa del cilindro de agujas 1 y el valor de la distancia entre el punto de origen del cilindro de agujas 1 y el punto de origen del codificador 14 se suministran como entrada a un circuito 24 de tratamiento de posición de agujas para convertirla en una señal de control, permitiendo que la señal de control así obtenida sea suministrada como entrada a un circuito de control principal 3 de la máquina tricotosa circular para determinar la posición de la primera aguja y del primer alimentador de la máquina tricotosa circular.
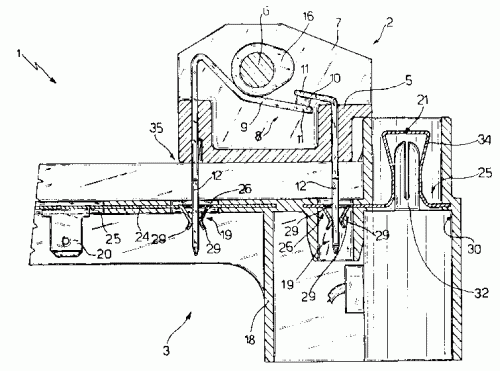
GRUPO ELECTRICO DE ACCIONAMIENTO, EN PARTICULAR PARA ELECTRODOMESTICOS.
(01/03/1992). Ver ilustración. Solicitante/s: ITW FASTEX ITALIA S.P.A.. Inventor/es: BASSI, ALBERTO.
SE DESCRIBE AQUI UN GRUPO ELECTRICO DE ACCIONAMIENTO PARA ELECTRODOMESTICOS, COMO HORNOS Y PLACAS ELECTRICAS, COMPUESTO POR UN PROGRAMADOR MECANICO DEFINIDO POR UN PRIMER CUERPO AISLANTE QUE LLEVA UNA PLURALIDAD DE INTERRUPTORES Y UN ARBOL GIRATORIO DOTADO DE UNAS RESPECTIVAS PALANCAS DE MANDO PARA LOS INTERRUPTORES, Y POR UN PUENTE TERMINAL DE CONEXIONES DEFINIDO POR UN SEGUNDO CUERPO AISLANTE QUE SUSTENTA UNA PLURALIDAD DE CONTACTOS ELECTRICOS; EL CUERPO DEL PUENTE TERMINAL DE CONEXIONES PRESENTA UN ASIENTO PERFILADO QUE RECIBE EN COINCIDENCIA AL CUERPO DEL PROGRAMADOR, Y ESTE ULTIMO SE ACOPLA MECANICA Y ELECTRICAMENTE A PRESION CON EL PUENTE TERMINAL DE CONEXIONES MEDIANTE UNOS RESPECTIVOS TERMINALES OPUESTOS DE CADA UNO DE DICHOS INTERRUPTORES, PERFILADOS COMO CONTACTOS LAMINARES DE TIPO FASTON E INSERTADOS EN FORMA TRASPASANTE EN UNAS RESPECTIVAS RANURAS DEL PUENTE TERMINAL DE CONEXIONES A TRAVES DE LAS CUALES SE PROYECTAN UNOS RESPECTIVOS CONTACTOS LAMINARES PERFILADOS EN FORMA DE V DEL MISMO.
PROGRAMADOR DE COORDENADAS.
(01/04/1974) Programador de coordenadas que constituyéndose a partir de un circuito impreso de doble cara. metalizada (venas conductoras constitutivas del, sistema de abcisas grabadas o serigrafiadas sobre. una de las caras y venas conductoras constitutivas del sistema de ordenadas sobre la cara contraria), se caracteriza. esencialmente porque la conexión selectiva de cada vena de uno de los sistemas con una cualquiera de las venas del sistema contrario se lleva a cabo sobre una de las caras, con la colaboración de elementos conductores de asiento plano, merced a que todas las venas de dicha cara presentan realizados a lo largo de su extensión unos recortes o estrangulamientos, localizados en los puntos de cruce con las venas de los dos sistemas, dentro de cada uno de cuyos recortes, y.aisladas en relación con las venas que los poseen, existen…
{kind=link}