CIP-2021 : B25J 17/02 : Uniones articuladas.
CIP-2021 › B › B25 › B25J › B25J 17/00 › B25J 17/02[1] › Uniones articuladas.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 17/00 Uniones.
B25J 17/02 · Uniones articuladas.
CIP2021: Invenciones publicadas en esta sección.
(01/05/1997) SE PRESENTA UN ROBOT DE BRAZOS EN PARTICULAR PARA LA DESCARGA DE PIEZAS DE TRABAJO, A MODO DE EJEMPLO PIEZAS DE FUNDICION DE INYECCION, ESTANDO EQUIPADO EL ROBOT CON UN BRAZO Y UN GANCHO UNIDO CON ESTE BRAZO . EL BRAZO ESTA UNIDO CON UNA TUERCA ROTATIVA ESFERICA, QUE SE ENCUENTRA MONTADA A PARTIR DE UNA PIEZA INTERNA Y DE UNA PIEZA EXTERIOR, DONDE UN HUSILLO GIRATORIO ESFERICO SE ENCUENTRA EN EL INTERIOR DE LA TUERCA ROTATIVA A LO LARGO DE SU EJE LONGITUDINAL. UNO DE LOS EXTREMOS DEL HUSILLO ESTA UNIDO CON UN BLOQUE DE SUJECION, MIENTRAS QUE EL OTRO EXTREMO DEL HUSILLO DISPONE DE DOS ESTRIAS INSERTADAS, EN FORMA DE 2 HASTA 6 SEMICIRCULOS. LA PIEZA INTERIOR Y LA PIEZA EXTERIOR DE LA TUERCA ROTATIVA ESFERICA ESTAN UNIDAS UNA CON OTRA DE TAL MODO, QUE LAS MARCHAS QUE SE ENCUENTRAN ENTRE ELLAS…
(16/03/1996). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
EL ARMAZON DE UN BRAZO DE UN ROBOT ARTICULADO TIENE UNA ESTRUCTURA EN FORMA CONCHIFERA, LA CUAL DESEMPEÑA UNA FUNCION DE CARGA Y ALOJA UN MODULO CONTENIENDO LA UNIDAD MOTOR Y TRANSMISION AFIN.
MUÑECA MECANICA PARA UN ROBOT.
(01/11/1995). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
SE PRESENTA UNA MUÑECA PARA UN ROBOT ARTICULADO QUE TIENE UN MIEMBRO OPERATIVO QUE PUEDE GIRAR ALREDEDOR DE TRES EJES MUTUAMENTE PERPENDICULARES Y TRES UNIDADES MOTORIZADAS CADA UNA DE LAS CUALES PUEDE HACER GIRAR AL MIEMBRO OPERATIVO ALREDEDOR DE SOLAMENTE UNO DE LOS TRES EJES SIN PROVOCAR NINGUNA ROTACION ALREDEDOR DE LOS OTROS EJES.
INTERFACE MECANICO FLEXIBLE.
(01/11/1995). Solicitante/s: SEVA, SOCIETE DITE,. Inventor/es: BANCON, GEORGES, MOLTER, MARTIAL.
ESTE INTERFACE MECANICO FLEXIBLE COMPRENDE: 2) QUE COMPRENDE UNA BRIDA SUPERIOR Y UNA BRIDA INFERIOR PARALELAS UNA A OTRA; LATAFORMA INFERIOR MONTADAS EN ESTE CARTER, ESTANDO CADA CARTER DIRIGIDO DE MANERA A ESTAR LIBREMENTE MOVIL EN SU PLANO RESPECTO DEL CARTER Y RESPECTO DE LA OTRA PLATAFORMA; OL DE SOPORTE MONTADO CON ROTULA FIJA EN UNA DE LAS PLATAFORMAS Y CON ROTULA MOVIL EN LA OTRA PLATAFORMA ; Y PLACA MONTADA CON DESLIZAMIENTO VERTICAL EN EL EXTREMO INFERIOR DEL ARBOL DE SOPORTE. APLICACION EN LA MANIPULACION AUTOMATIZADA DE PIEZAS FRAGILES.
(16/06/1995) ACTUADORES DE MATERIAL RIGIDO DE ACTUACION ELECTRICA DAN ARTICULACION A CORTADORES DE RAMAS ROBOTICOS. ACTUADORES PIEZOELECTRICOS POR EJ., PUEDEN SER USADOS EN VARIAS REALIZACIONES DE UNIONES ROBOTICAS PARA GIRAR UNA CONEXION ESFERICA O CILINDRICA O PARA TRANSLADAR UNA VARILLA. UNOS PARES OPUESTOS DE ACTUADORES ENGANCHAN EN UN MOVIMIENTO LENTO Y MANTIENEN SIEMPRE UN AGARRE TIPO PRENSA EN EL CORTADOR DE RAMAS ROBOTICO . LAS SUPERFICIES DE TRACCION DE LOS ACTUADORES CONECTAN CON EL ROBOT CON UNA CLARIDAD CERO. AL REVES DEL USO DE LOS COGINETES CONVENCIONALES LA CLARIDAD CERO Y EL CONTACTO DE TODA LA ZONA DOTA DE UNA RIGIDEZ MECANICA MUY…
MUÑECA PARA UN ROBOT INDUSTRIAL.
(01/12/1994). Solicitante/s: COMAU S.P.A.. Inventor/es: ORSI, MARIO, AMPARORE, MAURO.
UNA MUÑECA DE ROBOT CON DOS EJES DE ARTICULACION QUE TIENE UN PRIMER CUERPO QUE ES TRANSPORTADO AL EXTREMO DISTAL DEL BRAZO DEL ROBOT, UN SEGUNDO CUERPO SOPORTADO POR EL PRIMER CUERPO PARA SU ROTACION ALREDEDOR DEL PRIMER EJE QUE INTERSECTA EL EJE LONGITUDINAL DEL BRAZO DE ROBOT EN ANGULOS RECTOS, Y UN TERCER CUERPO SOSTENIDO POR EL SEGUNDO CUERPO PARA SU ROTACION ALREDEDOR DEL SEGUNDO EJE QUE INTERSECTA EL PRIMER EJE EN ANGULOS RECTOS. LOS DOS CUERPOS SON ROTADOS POR DOS MOTORES ELECTRICOS MONTADOS EN EL PRIMER CUERPO Y EN EL SEGUNDO CUERPO RESPECTIVAMENTE, CON LA INTERPOSICION DE UNIDADES DE REDUCCION DE "TRACCION HARMONICA" DEL TIPO EN EL QUE EL ROTOR DE SALIDA ES SOPORTADO PARA SU ROTACION MEDIANTE UN ELEMENTO DE SOPORTE DE CARGA QUE FORMA PARTE DE LA UNIDAD DE REDUCCION.
ACCIONAMIENTO DE AL MENOS DOS EJES CONCENTRICOS PARA EL MOVIMIENTO DE UN DISPOSITIVO DE SALIDA DE ROBOT.
(01/07/1994). Solicitante/s: KERPE, STEFAN. Inventor/es: KERPE, STEFAN.
SE TRATA DE UN ACCIONAMIENTO DE AL MENOS DOS EJES CONCENTRICOS PARA EL MOVIMIENTO DE DISPOSITIVO DE SALIDA DE ROBOT, ESPECIALMENTE PARA BRAZOS EN FORMA DE PINZA DE ROBOT, SEGUN SE MUESTRA EN EL DIBUJO. SE DISPONE AL MENOS DE UN REDUCTOR DE VELOCIDAD CIRCULATORIO , CUYA CARCASA Y CUYO EJE DE SALIDA , ESTAN EQUIPADOS CADA UNO CON UNA CORONA DENTADA , QUE CON LOS EJES ACTUAN CONJUNTAMENTE EN SUS CORONAS DENTADAS . LAS CORONAS DENTADAS DE LOS ENGRANAJES , MUESTRAN UNA DIFERENTE VELOCIDAD DE GIRO EN COMPARACION CON LOS ENGRANAJES DE ACCIONAMIENTO , Y LOS EJES DE LAS CORONAS DENTADAS DE LOS ENGRANAJES Y DE LOS EJES MUESTRAN LA MISMA DISTANCIA.
CABEZAL DE FRESADO, ESPECIALMENTE PARA ROBOT DE MECANIZADO.
(01/01/1994). Solicitante/s: SOCIETE NATIONALE D'ETUDE ET DE CONSTRUCTION DE MOTEURS D'AVIATION, "S.N.E.C.M.A.". Inventor/es: NIOCHE, JEAN-YVES MARIE, DELAVAL, JACQUES, LIENHART, GUY, PONTIER, JEAN-MARIE.
UN CONJUNTO DE MECANIZADO ESTA UNIDO PARTICULARMENTE A UN BRAZO DE ROBOT POR UN SOPORTE DE FIJACION COMPUESTO POR UNA PRIMERA PARTE EN FORMA GENERAL DE TAPADERA CON DOS ALAS EN EL INTERIOR DE LA CUAL ESTA DISPUESTA UNA SEGUNDA PARTE ENCERRANDO EL CONJUNTO DE MECANIZADO , UNIDA A LA PRIMERA PARTE POR AL MENOS UN ELEMENTO DE BARRA DE TORSION QUE LA DEJA UN GRADO DE LIBERTAD EN RELACION A LA PRIMERA PARTE.
ROBOT MANIPULADOR DE GRAN DIMENSION Y DE CAPACIDAD FUERTE PARA LA UTILIZACION EN MEDIO ABIERTO.
(01/12/1993). Solicitante/s: POTAIN COMPAGNIE GENERALE DE BATIMENT ET DE CONSTRUCTION CBC. Inventor/es: GENDRAULT, MICHEL, ROCH, CHARLES ANDRE.
ESTE ROBOT ESTA DESTINADO A LA MANIPULACION DE CARGAS EN OBRAS DE CONSTRUCCION O EN OBRAS PUBLICAS. UN PORTADOR MOTORIZADO CONTIENE UN MASTIL ORIENTABLE Y UN BRAZO DESPLEGABLE Y REPLEGABLE ARTICULADO EN LA CIMA DEL MASTIL, Y REALIZADO EN VARIOS ELEMENTOS ARTICULADOS ENTRE SI. EL EXTREMO DEL BRAZO ESTA UNIDO POR UN ENLACE MOTORIZADO CON UN BRAZO COMPENSADOR MOTORIZADO TELESCOPICO Y ORIENTABLE, QUE POSEE AL MENOS UN GRADO DE LIBERTAD REDUNDANTE Y EQUIPADO DE UN PORTA PRENSOR DE DETECCION DE ESFUERZOS QUE SOPORTA UN PRENSOR UNOS MEDIOS DE ACCIONAMIENTO Y DE CONTROL ESTAN PREVISTOS PARA LA MOTORIZACION DEL PORTADOR DEL BRAZO COMPENSADOR Y DEL ENLACE , MIENTRAS QUE OTROS MEDIOS ALIMENTAN CON ENERGIA ACCIONAN Y CONTROLAN EL PRENSOR.
ARTICULACION AUTO-MOTORIZADA, SIN ROZAMIENTO, Y CONJUNTO ARTICULADO, COMO UN PANEL SOLAR DE SATELITE EQUIPADO CON DICHAS ARTICULACIONES.
(01/04/1993). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: BLANC, ERIC, AUTERNAUD, JACQUES, BARTEVIAN, JEAN, BERTHEUX, PHILIPPE, DE MOLLERAT DU JEU, THIERRY, FOUCRAS, JEAN, LOUIS, MICHELMARELLO, GEORGES, POVEDA, PIERRE, ROUX, CHRISTIAN.
PARA ENLAZAR DOS ELEMENTOS VECINOS ARTICULADOS (E1,E2), POR EJEMPLO EN UN PANEL SOLAR DE SATELITE, SE PROPONE UNA ARTICULACION SIN ROZAMIENTO Y CUYA CINEMATICA DE DESPLIGUE PUEDE CONOCERSE CON UNA GRAN PRECISION. ESTA ARTICULACION CONSTA DE DOS HERRAJES APTOS PARA RODAR UNO SOBRE EL OTRO POR DOS SUPERFICIES CILINDRICAS (12A,14A), GARANTIZANDOSE EL GUIADO DE LA RODADURA POR UNOS ORGANOS FLEXIBLES, COMO UNAS LAMINAS DE RODADURA CUYOS EXTREMOS ESTAN FIJADOS A LOS HERRAJES Y PASAN, CRUZANDOSE, ENTRE LAS SUPERFICIES CILINDRICAS (12A,14A). UNA TENSION PREVIA DE TRACCION DE LAS LAMAS EVITA CUALQUIER MOVIMIENTO PARASITO ENTRE LOS HERRAJES, ESPECIALMENTE TRAS EL DESPLIEGUE. EL PAR MOTOR, QUE PROPORCIONA EL DESPLIEGUE AUTOMATICO DE LA ARTICULACION, ASI COMO SU INMOVILIZACION EN EL FIN DE CARRERA, MEDIANTE UNAS BANDAS ELASTICAS QUE ENLAZAN LOS DOS HERRAJES Y QUE ESTAN FORMADAS, CADA UNA DE ELLAS, POR DOS LAMAS SUPERPUESTAS.
JUNTA MULTIDIRECCIONAL CERRADA POR MANIPULADOR.
(01/03/1991). Solicitante/s: ETUDES TECHNIQUES-FRANCHE COMTE-ALSACE ETFA SARL. Inventor/es: BAILLS, JEAN-MICHEL, CRETIEN, GEORGE.
EL PRESENTE INVENTO ES RELATIVO A UN DISPOSITIVO DE PUESTA EN REFERENCIA POR ELEMENTOS DE APREHENSION DESTINADOS EN LA MANUTENCION, Y DE SEGURIDAD MULTIDIRECCIONAL, MONTADO ENTRE EL BRAZO DE UN MANIPULADOR O ROBOT, U OTRO DISPOSITIVO DE MANUTENCION, Y LA PINZA , U OTRO MEDIO DE APREHENSION, CARACTERIZADO EN QUE ESTA LIBRE ESPACIALMENTE Y CERRADOM Y EN QUE EL MEDIO DE UNION ESTA VENTAJOSAMENTE CONSTITUIDO POR TRES GATOS MONTADOS EN ARTICULACION AL MEDIO DE ROTULAS , POR LA CHAPA DEL CILINDRO EN LA PLACA DEL BRAZO , Y POR LA CHAPA DEL PISTON A LA PLACA DE LA PINZA , Y EL MEDIO DE APERTURA DE SEGURIDAD ESTA CONSTITUIDO POR UN PAR DE CAPTADORES DE POSICION O FIN DE CURSO (10 Y 11) QUE DETECTOR RESPECTIVAMENTE LAS POSICIONES BAJA Y ALTA DEL PISTON DE LOS GATOS. CADA GATO ESTA PROVISTA DE UN PAR DE CAPTADORES DE POSICION O DE FIN DE CURSO (10 Y 11).
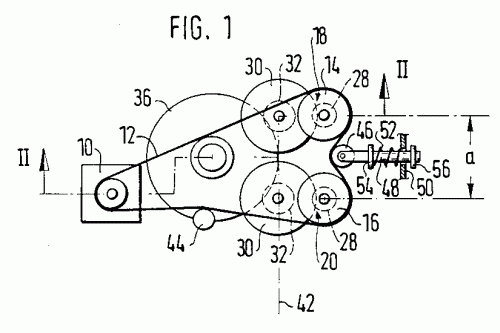
MECANISMO DE ENGRANAJE, ESPECIALMENTE PARA ARTICULACION GIRATORIA DE AUTOMATAS INDUSTRIALES.
(16/07/1990). Ver ilustración. Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: LEISNER, ERNST, GOSDOWSKI, GERHARD, BRUNS, JOACHIM, BUTTAU, HANS-PETER.
MECANISMO DE ENGRANAJE, ESPECIALMENTE PARA ARTICULACION GIRATORIA DE AUTOMATAS INDUSTRIALES, EN EL QUE SE CONFIGURAN A MODO DE UNA ROLDANA TENSORA , QUE ACTUA SOBRE UN ACCIONAMIENTO DE CORREA, LOS MEDIOS PARA MINIMIZAR O BIEN PARA ELIMINAR EL JUEGO DE LOS DIENTES, ACTUANDO EL ACCIONAMIENTO DE CORREA PREFERENTEMENTE A TRAVES DE CONTRAMARCHAS SOBRE DOS RUEDAS DENTADAS DE ACCIONAMIENTO , DISPUESTAS DESPLAZADAS ENTRE SI, AXIALMENTE PARALELAS, QUE ENGRANAN CONJUNTAMENTE SOBRE UNA RUEDA DENTADA ACCIONADA EN PUNTOS DIFERENTES DE SU PERIFERIA. CAMPO DE APLICACION PREFERENTE: AUTOMATAS DE BRAZOS BASCULABLES PARA INSTALACIONES DE MONTAJE EN LA FABRICACION INDUSTRIAL.
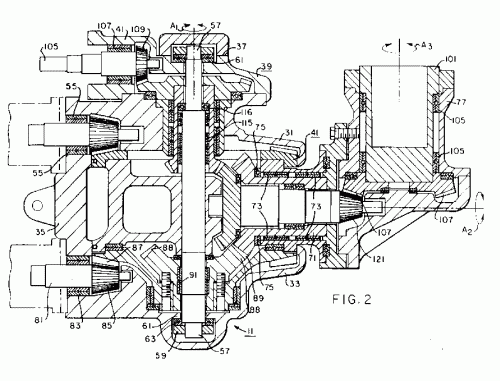
CABEZA DE TRANSMISION PARA MANIPULADORES.
(01/08/1988). Solicitante/s: KUKA SCHWEISSANLAGEN & ROBOTER GMBH. Inventor/es: ZIMMER, ERNST.
EL INVENTO CONCIERNE A LA EJECUCION DE ACCIONAMIENTO DE UNA CABEZA DE TRANSMISION DE VARIAS PARTES DE UN MANIPULADOR, CONOCIDA POR LA FIGURA DE LA DE-OS 34 28 748. SEGUN ELLA, TRES PARTES DE CABEZA , DISPUESTAS EN FILA, ESTAN APOYADAS UNA JUNTO A OTRA A LO LARGO DE EJES INCLINADOS , ESTANDO PREVISTO EN EL TREN DE ACCIONAMIENTO INDIVIDUAL, EN EL LADO DE SALIDA DE FUERZA, SENDOS ENGRANAJES FUERTEMENTE REDUCTORES, POR EJEMPLO ENGRANAJES DIFERENCIALES DE ACCIONAMIENTO ARMONICO. CON EL FIN DE CONSEGUIR MOVIMIENTOS DE GIRO UNIFORMES Y POR LO TANTO MAS FACILMENTE ANALIZABLES DE LA PARTE CENTRAL Y ANTERIOR DE CABEZA , SE PROPONE ELEGIR UNA REDUCCION (X) PARA UNO DE LOS DOS ENGRANAJES REDUCTORES QUE ESTAN ASOCIADOS A LA CABEZA DE TRANSMISION CENTRAL ASI COMO ANTERIOR , Y UNA REDUCCION (X-1) PARA EL OTRO DE LOS DOS ENGRANAJES REDUCTORES.
MECANISMO DE MANO ACCIONADO A DISTANCIA PARA LA ORIENTACION DEL ORGANO ACTIVO DE UN ROBOT INDUSTRIAL.
(16/03/1988). Ver ilustración. Solicitante/s: WESTINGHOUSE ELECTRIC CORPORATION. Inventor/es: COLIMITRA, THOMAS ANDREW.
MECANISMO DE MANO ACCIONADO A DISTANCIA PARA LA ORIENTACION DEL ORGANO ACTIVO DE UN ROBOT INDUSTRIAL. LA INVENCION SE REFIERE A UN MECANISMO DE MANO DESTINADO A SER UTILIZADO CON UN MANIPULADOR INDUSTRIAL, PREENTANDO DICHO MECANISMO DE MANO UN POSICIONAMIENTO MAS PRECISO CON TRES GRADOS DE LIBERTAD ADAPTANDOSE FACILMENTE A ROBOTS Y A SISTEMAS ROBOTICOS EXISTENTES, UTILIZANDO ESTE MECANISMO TRES EJES DE SISTEMA DE ACCIONAMIENTO. ESTE MECANISMO INCLUYE TAMBIEN UNA ENVOLTURA EXTERNA QUE A SU VEZ INCLUYE UNA PRIMERA, SEGUNDA Y TERCERA ENVOLTURAS CON SUS MEDIOS CORRESPONDIENTES DE ACCIONAMIENTO. EL MECANISMO OBJETO DE LA INVENCION UTILIZA UNA UBICACION UNICA DE LOS COJINETES PARA PROPORCIONAR UN MECANISMO DE MANO DE DIMENSIONES MAS PEQUEÑAS QUE PUEDE SER FACILMENTE, TANTO AMPLIADO COMO REDUCIDO.
CABEZA ARTICULADA PARA ROBOT INDUSTRIAL.
(01/08/1987). Solicitante/s: BARLAND,MICHEL.
CABEZA ARTICULADA PARA ROBOT INDUSTRIAL, CON TRES EJES DE ARTICULACION. CONSTA DE TRES BASTIDORES MOVILES (B1, B2, B3) MONTADOS UNOS A CONTINUACION DE OTROS, SIGUIENDO UN EJE LONGITUDINAL (XX), ESTANDO SOPORTADO EL PRIMER BASTIDOR (B1) POR LA EXTREMIDAD LIBRE DEL BRAZO DEL ROBOT Y PUDIENDO GIRAR ALREDEDOR DE UN PRIMER EJE (A1) CON RESPECTO A ESTE BRAZO; DE UN UTIL QUE ES POSICIONADO Y ORIENTADO POR EL ROBOT, EL CUAL SOPORTA EL TERCER BASTIDOR (B3); DE UN PRIMER ORGANO MOTOR (M2) QUE GOBIERNA LA ROTACION DEL SEGUNDO BASTIDOR (B2) ALREDEDOR DE SU EJE DE ROTACION (A2); Y DE UN SEGUNDO ORGANO MOTOR (M1-3) QUE GOBIERNA LAS ROTACIONES DE LOS OTROS BASTIDORES. DE APLICACION A LOS ROBOTS DE MECANIZACION, SOLDADURA Y PINTURA.
(01/11/1984). Solicitante/s: CYBER ROBOTICS LIMITED.
BRAZO ROBOT.CONSTA DE: UNA PLACA BASAL DE MONTAJE (A) QUE TIENE FIJADA EN LA PARTE (D), UN EXTREMO DE UNA BARRA DE ENLACE (C), DE LONGITUD FIJA. EN EL OTRO EXTREMO LA BARRA DE ENLACE (C), ESTA CONECTADA A UNA SEGUNDA PLACA DE MONTAJE (E), POR MEDIO DE UNA ARTICULACION DE ROTULA (B), LA CUAL PROPORCIONA UN GIRO UNIVERSAL DE LA BARRA (C) CON RESPECTO A LA PLACA (E). LAS PLACAS (A Y E), ESTAN TAMBIEN INTERCONECTADAS POR DOS BARRAS DE ENLACE DE LONGITUD VARIABLE (G). UNA SECCION INFERIOR (J), TIENE UN FILETEADO A ROSCA EXTERNO EN SU PARTE SUPERIOR (I), Y EN SU EXTREMO INFERIOR UNA JUNTA UNIVERSAL (K) DE DOS VIAS. UNA PORCION SUPERIOR TIENE EN SU PARTE MAS BAJA (H), UN FILETEADO A ROSCA INTERNO QUE SE ACOPLA CON EL PERFIL DE ROSCA EXTERNO (I) Y TIENE UNA JUNTA UNIVERSAL (F) DE DOS VIAS. LA BARRA (C) PROPORCIONA UN SOPORTE PARA UN MOTOR DE ACTUACION (L), EL CUAL SUMINISTRA UN PAR DE ACTUACION A LA BASE DE LA BARRA DE ENLACE (G), POR MEDIO DE UN SISTEMA DE REDUCCION MECANICO CON CADENA (M).
UN APARATO DE BRAZO-AUTOMATA.
(16/03/1984). Solicitante/s: WESTINGHOUSE ELECTRIC CORPORATION.
APARATO DE BRAZO-AUTOMATA.CONSTA DE UNA PRIMERA ROTULA , UNA SEGUNDA ROTULA GIRATORIA INDEPENDIENTE DE LA PRIMERA Y UN ACCIONADOR SOPORTANDO MEDIANTE ROTACION POR LA SEGUNDA ROTULA . LA PRIMERA ROTULA TIENE CONTROLADA SU ROTACION POR UN EJE EXTERNO HUECO , LA SEGUNDA POR SU EJE . EXISTE UNA LINEA DE ALIMENTACION DE ENERGIA PARA CONTROLAR EL FUNCIONAMIENTO DE LA MUÑECA Y EL BRAZO.
"UN DISPOSITIVO MANIPULADOR DE MULTIPLES BRAZOS PARA SITUAR EN POSICION AUTOMATICAMENTE Y CON PRECISION UNA CABEZA DE TRABAJO".
(16/06/1983). Solicitante/s: WESTINGHOUSE ELECTRIC CORPORATION.
EXTRUCTURA DE ROBOT DE MANIPULADOR AUTOMATICO DE MULTIPLES BRAZOS. INCLUYE UN SOPORTE DE POSICION FIJA QUE LLEVA TRES BRAZOS DE COLOCACION EN POSICION, QUE ESTAN CONECTADOS ARTICULADAMENTE ENTRE SI EN SU POSICION DE CONVERGENCIA PARA SOSTENER UNA CABEZA DE TRABAJO SIENDO OPERABLES INDEPENDIENTEMENTE LOS MEDIOS DE ACCIONAMIENTO DE TIPO DE TORNILLO (12A, 14A Y 16A) PARA IMPULSAR A SU RESPECTIVO BRAZO EN UNA DIRECCION AXIAL, SIENDO CADA BRAZO RIGIDO, ES DECIR SIN ARTICULACIONES, PARA QUE ESTEN SOMETIDOS SOLO A ESFUERZOS DE TRACCION O DE COMPRESION BAJO LA ACCION DE UNA CARGA.
UNA DISPOSICION DE ARTICULACION PARA BRAZO DE MANIPULADOR.
(16/05/1980). Solicitante/s: ASSOCIATION DES OUVRIERS EN INSTRUMENTS DE PRECISI.
1. Una disposición de articulación para brazo de manipulador, caracterizada porque incluye esencialmente dos platos, por ejemplo dos coronas, unidas entre sí por al menos dos bielas, cuyos extremos están acoplados con dichos platos por juntas con dos grados de libertad.
DISPOSITIVO DE TRANSMISION DE UN MOVIMIENTO DE ROTACION DE CUALQUIER AMPLITUD A TRAVES DE UNA PARED ESTANCA.
(01/12/1976). Solicitante/s: GACHOT, S. A.
Resumen no disponible.
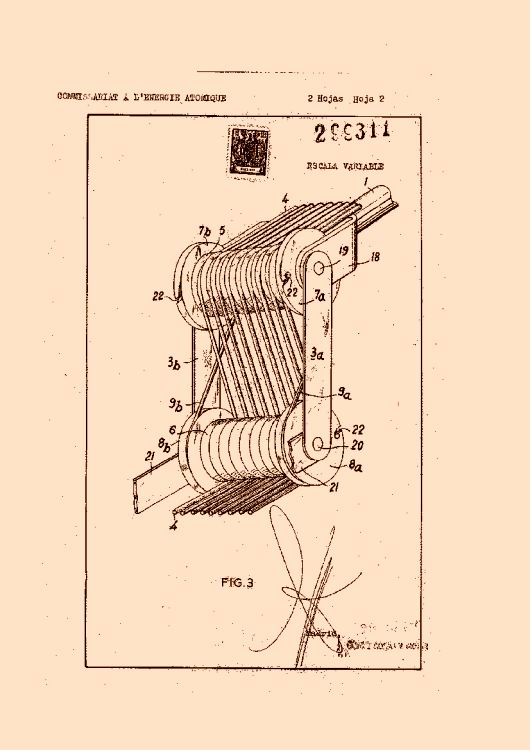
PERFECCIONAMIENTOS EN LOS DISPOSITIVOS DE ARTICULACIÓN CON TRANSMISIÓN DE MOVIMIENTOS.
(16/08/1964). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Resumen no disponible.
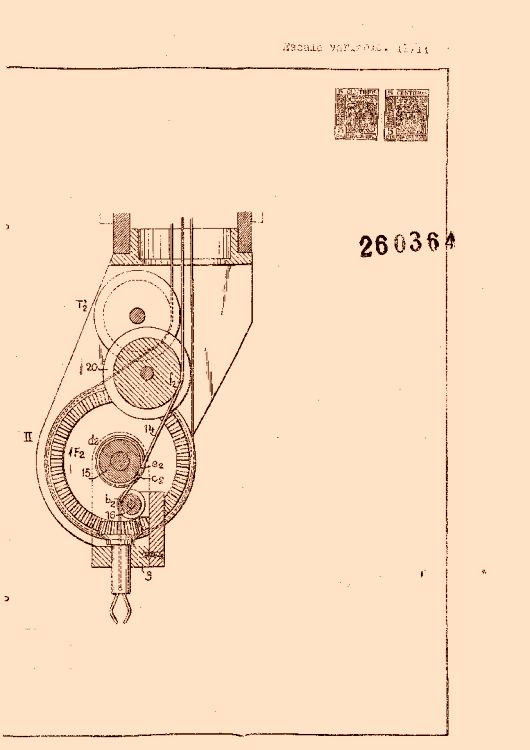
DISPOSITIVO DE CABEZA DE MANDO.
(01/11/1960). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE.
Dispositivo de cabeza de mando del tipo "rodillera" para telemanipulador, que tiene un elemento tubular llevador por un soporte oscilante y atravesado axialmente por un cable destinado a unir un órgano de mando a un órgano movido, siendo notable porque, por una parte, el eje de oscilación del soporte oscilante está constituido por un gorrón único que atraviesa de parte a parte la cabeza y, por otra parte, la guía del cable está asegurada por la combinación de una polea montada loca sobre este gorrón llevado por el soporte fijo y de una roldana destinada a llevar el cable al eje del elemento tubular que pivota en este soporte, después de un cierto enrollamiento de este cable con relación a esta polea, una segunda polea llevada por la cabeza para dar a la porción del cable comprendida entre las dos poleas una dirección invariable.
{kind=link}
{kind=link}
{kind=link}
{kind=link}