CIP-2021 : B25J 9/22 : Sistemas de registro o sistemas de reproducción (en general G05B 19/42).
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/22[2] › Sistemas de registro o sistemas de reproducción (en general G05B 19/42).
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/22 · · Sistemas de registro o sistemas de reproducción (en general G05B 19/42).
CIP2021: Invenciones publicadas en esta sección.
Método y dispositivo que generan automáticamente programas de operación.
(29/05/2019) Un método para generar automáticamente un programa de operación, que hace que un cabezal de trabajo se mueva en relación con un objeto de trabajo y lleve a cabo el trabajo deseado, comprendiendo el método:
un primer paso para mostrar una ventana de entrada de datos de referencia que permite la introducción de datos de la forma del objeto de trabajo o de una región de trabajo;
un segundo paso para incorporar los datos de imagen del objeto de trabajo o de la región de trabajo, siendo los datos de imagen capturados por un dispositivo de entrada de datos de imagen;
un tercer paso para compensar la distorsión en los datos de imagen incorporados, incluyendo la distorsión una inclinación de una imagen atribuible a la disposición del dispositivo de entrada de datos de imagen,…
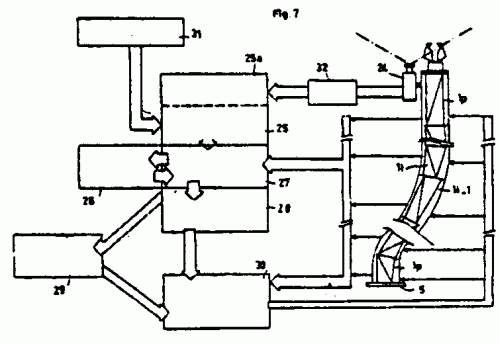
DISPOSICION PARA LA CAPTACION DE IMAGENES EN FORMA PROGRAMADA.
(01/04/1992). Ver ilustración. Solicitante/s: TICO FARRE RAMON, Y OTROS ROCA BENEITO, XAVIER.
ESTA DISPOSICION PARA LA CAPTACION DE IMAGENES EN FORMA PROGRAMADA, CONSISTE EN UN CONJUNTO COMPUESTO POR UN ROBOT, UN EQUIPO DE CAPTACION DE IMAGENES, UN SOPORTE ARTICULADO PARA ESTE EQUIPO Y UN INTERFACE DE CONTROL, LOS CUALES ELEMENTOS OPERAN COMBINADAMENTE Y DE MODO QUE EL ROBOT DETERMINA LA MANIPULACION DEL EQUIPO DE FILMACION Y ALMACENA PROGRAMAS DE TRAYECTORIAS Y DE SERVOCONTROL PROPIO, SIENDO EL EQUIPO DE CAPTACION DE IMAGENES DEL TIPO DE UNA VIDEOGRABADORA, UNA FILMADORA O CAMARA FOTOGRAFICA CON ADAPTCION PRA SU SERVOCONTROL MEDIANTE EL ROBOT, MIENTRAS QUE EL INTERFACE DE CONTROL COMUNICA EN FORMA BIDIRECCIONAL DICHO ROBOT CON EL EQUIPO DE CAPTACION DE IMAGENES. ESTA DISPOSICION ROBOTIZADA PERMITE LA REPETICION EXACTA DE SECUENCIAS POR MEDIO DEL EQUIPO DE CAPTAION DE IMAGENES, LO QUE NO RESULTA POSIBLE POR MEDIOS PERSONALES O MECANICOS.
ROBOT REDUNDANTE DE TIPO MODULAR.
(01/05/1989). Ver ilustración. Solicitante/s: LOGABEX SOCIETE A RESPONSABILITE LIMITEE. Inventor/es: DURAND, DIDIER, CH\'HAYDER, AMEUR, DIAZ, CONSTANTINO.
LA INVENCION SE REFIERE A UN ROBOT REDUNDANTE DE TIPO MODULAR, QUE PERMITE DESPLAZAR UN TERMINAL DE UNA SITUACION INICIAL HACIA UNA SITUACION FINAL. ESTE ROBOT COMPRENDE UNA SUCESION DE MODULOS, CADA UNO CONSTITUIDO POR UNA PLATAFORMA Y POR SEIS ACCIONADORES DISPUESTOS SEGUN UNA ARQUITECTURA ANGULADA CERRADA, UN SISTEMA DE CAPTADORES ASOCIADO A CADA MODULO, Y UNOS MEDIOS DE MANDO QUE PERMITEN DETERMINAR UNA CONFIGURACION DEL ROBOT QUE CORRESPONDE A LA SITUACION FINAL A ALCANZAR POR EL TERMINAL Y PARA CONDICIONAR LOS ACCIONADORES PARA DISPONER LOS DIVERSOS MODULOS SEGUN ESTA CONFIGURACION. ESTOS MEDIOS DE MANDO COMPRENDEN EN PARTICULAR MEDIOS DE ALMACENADO DE LOS ESPACIOS ACCESIBLES PARA CADA PLATAFORMA, MEDIOS DE TOMA DE LA SITUACION FINAL A ALCANZAR, MEDIOS DE CALCULO DE LA CONFIGURACION DEL ROBOT, Y MEDIOS DE CALCULO DE ESTADOS DE LOS ACCIONADORES Y UNA INTERFAZ DE CONDICIONADO DE ESTOS ULTIMOS.
{kind=link}
{kind=link}