CIP-2021 : B61L 17/00 : Sistemas de agujas para estación ferroviaria de clasificación.
CIP-2021 › B › B61 › B61L › B61L 17/00[m] › Sistemas de agujas para estación ferroviaria de clasificación.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B61L 17/02 · Detalles, p. ej. indicando el grado de congestión de la vía.
CIP2021: Invenciones publicadas en esta sección.
Método y sistema de comunicación para el control seguro de un itinerario.
(17/05/2017) Método de control seguro del itinerario recorrido por un vehículo (A) que circula sobre una zona de aproximación (ZA) a una zona de maniobra (ZM), para lo que:
- la zona de maniobra está precedida de una señalización de cierre (D, C, F) dispuesta en el suelo y adaptada para informar al vehículo para que pare,
- una temporización de seguridad (TS) está dimensionada por una unidad de mando en el suelo (USOL) para asegurar que el vehículo se detiene antes de cruzar sobre la zona de maniobra,
- en paralelo a la señalización de cierre (D, C, F) se transmite una solicitud de información (RI) a la unidad de seguridad de mando (USEMB) a bordo del vehículo, solicitud que proviene de la unidad de mando en el suelo, caracterizado porque,
- la unidad de seguridad de mando a bordo…
Aparato de procesamiento o de control intrínsecamente seguro.
(03/02/2016) Un aparato de procesamiento o de control intrínsecamente seguro que tiene una unidad de procesamiento con
- un primer procesador y una memoria que contiene un programa predeterminado de procesamiento de datos y/o de control;
- por lo menos un puerto de entrada para datos de entrada recibidos desde por lo menos una unidad remota;
- por lo menos un puerto de salida para datos de salida a transmitir a por lo menos una unidad remota bajo el control de dicha primera unidad de procesamiento;
caracterizado por que
- la primera unidad de procesamiento comprende además medios para generar códigos únicos para la comprobación funcional de las etapas de procesamiento o recepción o transmisión que se llevan a cabo (denominadas palabras de comprobación) y un puerto para la transmisión de las…
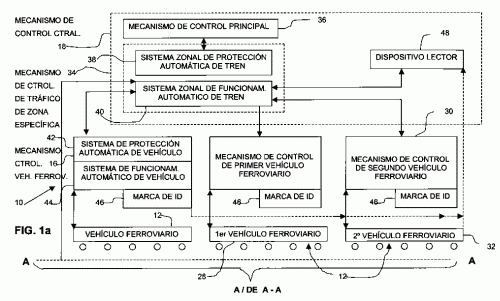
SISTEMA Y METODO DE MANIPULACION AUTOMATIZACION DE VEHICULOS EN UN SISTEMA DE FERROCARRILES.
(01/03/2006). Ver ilustración. Solicitante/s: BOMBARDIER TRANSPORTATION (TECHNOLOGY) GMBH. Inventor/es: KARG, KENNETH, A., CROSS, MICHAEL, KRUT, GARY S., DEGRAVE, JOHN T., EMAHIZER, CHAD, RUHE, WILLIAM, CLAWSON, LINDA F.
Sistema de manipulación automatizada para manipular al menos un vehículo en un sistema de tránsito; dicho sistema de manipulación automatizada consta de: un mecanismo de control de vehículo en comunicación con al menos un vehículo y configurado para recibir, procesar y transmitir señales para controlar el funcionamiento del vehículo, y un mecanismo de control central en comunicación sin contactos o inalámbrica con el mecanismo de control de vehículo y configurado para recibir, procesar y transmitir señales para controlar el mecanismo de control de vehículo , iniciando así al menos una operación de manipulación en el vehículo, en donde la operación de manipulación es al menos una de las siguientes: I) añadir un vehículo al sistema de tránsito; II) retirar un vehículo del sistema de tránsito; III) enganchar un primer vehículo a un segundo vehículo, y IV) desenganchar un primer vehículo de un segundo vehículo.
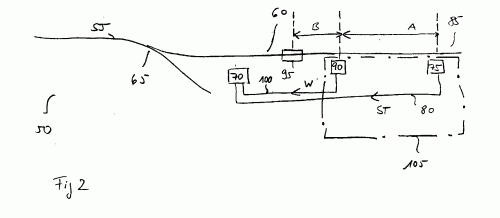
PROCEDIMIENTO E INSTALACION PARA APARCAR UNIDADES DE VAGON SOBRE UNA VIA DE MANIOBRAS DE UNA INSTALACION DE VIA.
(16/06/2003). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: TALKE, ULRICH, DR., HEIN, CARSTEN, DR.
LA INVENCION TIENE POR OBJETO DESCRIBIR UN PROCEDIMIENTO MEDIANTE EL CUAL SE PUEDEN ESTACIONAR UNIDADES DE VAGONES CON MUY POCO ESFUERZO SOBRE LA VIA DE MANIOBRA DE UN SISTEMA DE VIAS. ESTE PROBLEMA SE RESUELVE MEDIANTE UN PROCEDIMIENTO EN EL CUAL LAS UNIDADES CONSECUTIVAS DE VAGONES SE CONDUCEN DESDE UNA VIA DE ALIMENTACION A TRAVES DE UNA AGUJA A UNA VIA DE MANIOBRA Y SE PUEDEN IR ESTACIONANDO AL EMPUJAR LAS UNIDADES DE VAGON PREVIAMENTE ESTACIONADAS SIEMPRE EN LAS PROXIMIDADES DE LA AGUJA, CON UN GENERADOR DE SEÑALES SITUADO EN EL ENTORNO DE UNA ZONA PREVIAMENTE DETERMINADA EN LA VIA DE MANIOBRA , QUE GENERA UNA SEÑAL DE ACCIONAMIENTO (ST) PARA UN SISTEMA DE SEÑALIZACION PREVISTO EN LA ZONA DE LA AGUJA CUANDO AL SEGUIR EMPUJANDO LAS UNIDADES DE VAGONES YA ESTACIONADAS, LA PRIMERA UNIDAD DE VAGON ESTACIONADA HAYA REBASADO EL PUNTO PREVIAMENTE FIJADO, Y CUANDO AL ESTAR ACCIONADO EL SISTEMA DE SEÑALIZACION SE TERMINA LA COLOCACION DE UNIDADES DE VAGON SOBRE LA VIA DE MANIOBRA.
PROCEDIMIENTO PARA AVISAR DE ZONAS LIBRES Y OCUPADAS DE TRAMOS DE VIAS EN INSTALACIONES DE MANIOBRA EN FERROCARRILES Y DISPOSITIVO PARA REALIZAR EL PROCEDIMIENTO.
(01/11/1996) EN EL FUNCIONAMIENTO DE MANIOBRA EXISTE UN DISPOSITIVO QUE AVISA PREMATURAMENTE A UNA ZONA ACTIVA DE AGUJAS A TRAVES DE MECANISMOS AVISADORES DE VIAS BAJO VEHICULOS SUPERLARGOS. PARA CONSEGUIR MEDIDAS CONSTRUCTIVAS PARTICULARES E IMPEDIR QUE LA AGUJA PUEDE DESVIARSE BAJO VEHICULOS SUPERLARGOS. EL PRESENTE INVENTO VALORA LA SEÑAL DE ZONA LIBRE DE VIAS (GFAW) COMO AVISO DE ZONA LIBRE DE LOS TRAMOS DE VIAS CORRESPONDIENTES, CUANDO SE CONSTATA QUE TODOS LOS EJES DEL VEHICULO (FZ) O UN GRUPO DE VEHICULOS TRANSITABLES POR EL TRAMO RUEDAN POR EL TRAMO. PARA EL PRIMER TRAMO Y EN LA DIRECCION DE MARCHA UNA INSTALACION AVISADORA DE VIAS SE FIJA A TRAVES DE UN INDICADOR (EL) QUE RECORRE EL PASO DEL VEHICULO O GRUPOS DE VEHICULOS. LA SEÑAL DEL INDICADOR (GFWA) TEMPRANA Y TEMPORAL CON LA SEÑAL (GFWA1)…
PROCEDIMIENTO PARA LA DETERMINACION DE LA RESISTENCIA A LA RODADURA DE VEHICULOS FERROVIARIOS.
(01/05/1995) PARA LA DETERMINACION ON-LINE DE LA RESISTENCIA A LA RODADURA DE UNA DERIVACION SE TOMA EL CAMINO DE RODADURA/COMPORTAMIENTO DE DURACION DE LA DERIVACION EN UNA MARCHA LIBRE; CON ELLO SE DETERMINAN LOS TIEMPO DE RODADURA DE CONTACTO A TRAVES DE LOS EJES INDIVIDUALES DE LA DERIVACION. SON DETERMINADOS ADEMAS LOS PUNTOS DE TIEMPO DE RODADURA DE CONTACTO DE RESULTADO DE CALCULO A PARTIR DE LA SIMULACION DEL DESARROLLO. EL COMPORTAMIENTO DE DESARROLLO DE UNA DERIVACION SE AVERIGUA A PARTIR DEL COMPORTAMIENTO DEL DESARROLLO AVERIGUADO SEGUN UN PROCESO DE CALCULO, SIENDO PREPARADO PARA ELLO VALORES FALSOS DEL MODELO DE SIMULACION PARA LAS VARIABLES CONSIDERADAS. A TRAVES DE LA RELACION DE LOS VALORES NUMERICOS PARA LA INFLUENCIA, LA MODIFICACION DE ESTAS…
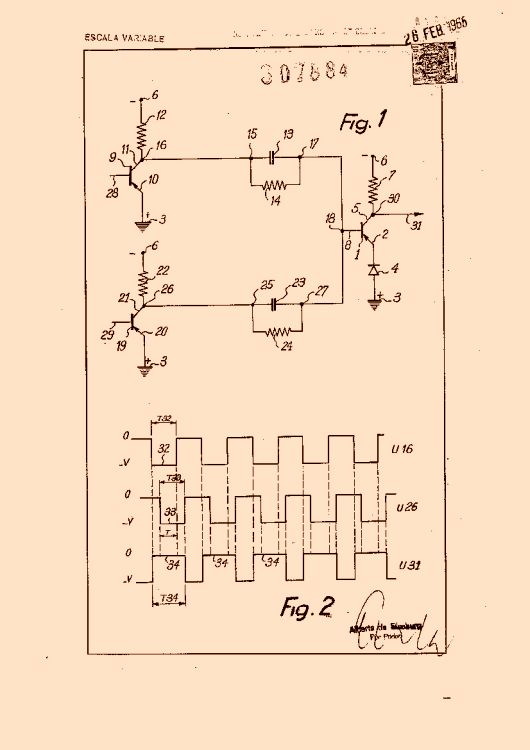
UNA DISPOSICION DE CIRCUITO LOGICO DEL TIPO O O DISYUNTIVO.
(01/05/1965). Ver ilustración. Solicitante/s: COMPAGNIE DES FREINS ET SIGNAUX WESTINGHOUSE.
Resumen no disponible.
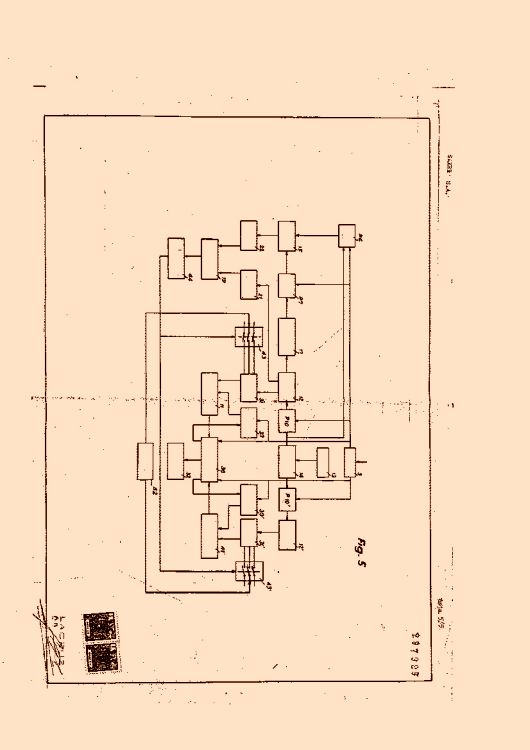
DISPOSITIVO ELECTRÓNICO DE MANDO AUTOMÁTICO DEL FRENO DE VÍA.
(16/08/1964). Ver ilustración. Solicitante/s: SAXBY, SOCIÉTÉ ANONYME.
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}
{kind=link}